
13 Hydraulic-Cylinders PDF
13 Hydraulic-Cylinders PDF
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
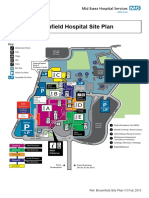
- Broomfield Hospital Site Plan: Café Shops Lifts Information PointsDocument1 pageBroomfield Hospital Site Plan: Café Shops Lifts Information Pointsady trader0% (2)
- Mitsubishi Triton l200 Specifications Specs PDFDocument28 pagesMitsubishi Triton l200 Specifications Specs PDFngulumi82100% (2)
- Tristanmarzeski Com ResumeDocument1 pageTristanmarzeski Com Resumeapi-235468779No ratings yet
- On Linguistic Politeness Theory: Robin Lakoff's Theory of Politeness, Brown and Levinson's Theory of Politeness, Geoffrey Leech's Theory of PolitenessDocument9 pagesOn Linguistic Politeness Theory: Robin Lakoff's Theory of Politeness, Brown and Levinson's Theory of Politeness, Geoffrey Leech's Theory of PolitenessCentral Asian StudiesNo ratings yet
- Apron An Apron Is A Garment That Is Worn Over Other Clothing and Covers Mainly The Front of The BodyDocument3 pagesApron An Apron Is A Garment That Is Worn Over Other Clothing and Covers Mainly The Front of The BodyMicahDelaCruzCuatronaNo ratings yet
- Debug Tacacs CiscoDocument5 pagesDebug Tacacs CiscodeztrocxeNo ratings yet
- ICC 70 AdministratorsGuide en PDFDocument92 pagesICC 70 AdministratorsGuide en PDFMarie ManuelNo ratings yet
- Emflon PFRW Filter Cartridges: For Sterile Filtration of GasesDocument3 pagesEmflon PFRW Filter Cartridges: For Sterile Filtration of GasesRichard BakerNo ratings yet
- Primus Overview Catalogue ANGDocument8 pagesPrimus Overview Catalogue ANGpesumasinad0% (1)
- Archer T5E (UN) - 1.0 Datasheet PDFDocument4 pagesArcher T5E (UN) - 1.0 Datasheet PDFeeerakeshNo ratings yet
- 80 3689 01 Threaded ConnectionsDocument12 pages80 3689 01 Threaded ConnectionsMiguel Alfonso Ruiz MendezNo ratings yet
- International Tropical Timber Organization: (ITTO) Fellowship Application FormDocument11 pagesInternational Tropical Timber Organization: (ITTO) Fellowship Application FormKhoza RaNo ratings yet
- The State of Structural Engineering in The US - IDEA StatiCaDocument6 pagesThe State of Structural Engineering in The US - IDEA StatiCaluisNo ratings yet
- CRAM ImagenDocument4 pagesCRAM ImagenPAUL RODRIGUEZNo ratings yet
- OtooDocument11 pagesOtooStefania DavidNo ratings yet
- Diff AmpDocument54 pagesDiff AmpUday GulghaneNo ratings yet
- Diploma in Business: Assignment BriefDocument10 pagesDiploma in Business: Assignment Brief陈肇远No ratings yet
- History of Subcontinent NewspapersDocument1 pageHistory of Subcontinent NewspapersDaniyal Abbas Khan100% (3)
- MFI 2 - Unit 3 - SB - L+SDocument10 pagesMFI 2 - Unit 3 - SB - L+SHoan HoàngNo ratings yet
- O-Levels Pure Mathematics ExemplarDocument36 pagesO-Levels Pure Mathematics Exemplartanatswarunganga7No ratings yet
- Essay EnvironmentDocument4 pagesEssay Environmenttuevptvhd100% (2)
- Heat Exchanger Design CHE 311 Final Project MSUDocument15 pagesHeat Exchanger Design CHE 311 Final Project MSUnefoussiNo ratings yet
- CMA Pre Exam Test PDFDocument28 pagesCMA Pre Exam Test PDFVinay YerubandiNo ratings yet
- Countries and Diplomas Diploma Requirements Wageningen University 2023/2024Document11 pagesCountries and Diplomas Diploma Requirements Wageningen University 2023/2024JuliaNo ratings yet
- CMP 1 1 CDPDocument11 pagesCMP 1 1 CDPSachin NakadeNo ratings yet
- BSBCMM511 Simulation PackDocument4 pagesBSBCMM511 Simulation PackmiraNo ratings yet
- Tel. ++39 011 9648211 - Fax ++39 011 9648222 E-Mail: Irem@irem - It - WWW - Irem.itDocument8 pagesTel. ++39 011 9648211 - Fax ++39 011 9648222 E-Mail: Irem@irem - It - WWW - Irem.itkenneth molina100% (1)
- Rapidraw Honey AnalysisDocument5 pagesRapidraw Honey AnalysistaufiqridzNo ratings yet
- Practical File AI - Class 10Document3 pagesPractical File AI - Class 10pawankvs2008No ratings yet
- Experience With The Munster-Type Below-Elbow Prosthesis, A Preliminary ReportDocument5 pagesExperience With The Munster-Type Below-Elbow Prosthesis, A Preliminary ReportrehabeasyNo ratings yet





































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Broomfield Hospital Site Plan: Café Shops Lifts Information PointsDocument1 pageBroomfield Hospital Site Plan: Café Shops Lifts Information Pointsady trader0% (2)
- Mitsubishi Triton l200 Specifications Specs PDFDocument28 pagesMitsubishi Triton l200 Specifications Specs PDFngulumi82100% (2)
- Tristanmarzeski Com ResumeDocument1 pageTristanmarzeski Com Resumeapi-235468779No ratings yet
- On Linguistic Politeness Theory: Robin Lakoff's Theory of Politeness, Brown and Levinson's Theory of Politeness, Geoffrey Leech's Theory of PolitenessDocument9 pagesOn Linguistic Politeness Theory: Robin Lakoff's Theory of Politeness, Brown and Levinson's Theory of Politeness, Geoffrey Leech's Theory of PolitenessCentral Asian StudiesNo ratings yet
- Apron An Apron Is A Garment That Is Worn Over Other Clothing and Covers Mainly The Front of The BodyDocument3 pagesApron An Apron Is A Garment That Is Worn Over Other Clothing and Covers Mainly The Front of The BodyMicahDelaCruzCuatronaNo ratings yet
- Debug Tacacs CiscoDocument5 pagesDebug Tacacs CiscodeztrocxeNo ratings yet
- ICC 70 AdministratorsGuide en PDFDocument92 pagesICC 70 AdministratorsGuide en PDFMarie ManuelNo ratings yet
- Emflon PFRW Filter Cartridges: For Sterile Filtration of GasesDocument3 pagesEmflon PFRW Filter Cartridges: For Sterile Filtration of GasesRichard BakerNo ratings yet
- Primus Overview Catalogue ANGDocument8 pagesPrimus Overview Catalogue ANGpesumasinad0% (1)
- Archer T5E (UN) - 1.0 Datasheet PDFDocument4 pagesArcher T5E (UN) - 1.0 Datasheet PDFeeerakeshNo ratings yet
- 80 3689 01 Threaded ConnectionsDocument12 pages80 3689 01 Threaded ConnectionsMiguel Alfonso Ruiz MendezNo ratings yet
- International Tropical Timber Organization: (ITTO) Fellowship Application FormDocument11 pagesInternational Tropical Timber Organization: (ITTO) Fellowship Application FormKhoza RaNo ratings yet
- The State of Structural Engineering in The US - IDEA StatiCaDocument6 pagesThe State of Structural Engineering in The US - IDEA StatiCaluisNo ratings yet
- CRAM ImagenDocument4 pagesCRAM ImagenPAUL RODRIGUEZNo ratings yet
- OtooDocument11 pagesOtooStefania DavidNo ratings yet
- Diff AmpDocument54 pagesDiff AmpUday GulghaneNo ratings yet
- Diploma in Business: Assignment BriefDocument10 pagesDiploma in Business: Assignment Brief陈肇远No ratings yet
- History of Subcontinent NewspapersDocument1 pageHistory of Subcontinent NewspapersDaniyal Abbas Khan100% (3)
- MFI 2 - Unit 3 - SB - L+SDocument10 pagesMFI 2 - Unit 3 - SB - L+SHoan HoàngNo ratings yet
- O-Levels Pure Mathematics ExemplarDocument36 pagesO-Levels Pure Mathematics Exemplartanatswarunganga7No ratings yet
- Essay EnvironmentDocument4 pagesEssay Environmenttuevptvhd100% (2)
- Heat Exchanger Design CHE 311 Final Project MSUDocument15 pagesHeat Exchanger Design CHE 311 Final Project MSUnefoussiNo ratings yet
- CMA Pre Exam Test PDFDocument28 pagesCMA Pre Exam Test PDFVinay YerubandiNo ratings yet
- Countries and Diplomas Diploma Requirements Wageningen University 2023/2024Document11 pagesCountries and Diplomas Diploma Requirements Wageningen University 2023/2024JuliaNo ratings yet
- CMP 1 1 CDPDocument11 pagesCMP 1 1 CDPSachin NakadeNo ratings yet
- BSBCMM511 Simulation PackDocument4 pagesBSBCMM511 Simulation PackmiraNo ratings yet
- Tel. ++39 011 9648211 - Fax ++39 011 9648222 E-Mail: Irem@irem - It - WWW - Irem.itDocument8 pagesTel. ++39 011 9648211 - Fax ++39 011 9648222 E-Mail: Irem@irem - It - WWW - Irem.itkenneth molina100% (1)
- Rapidraw Honey AnalysisDocument5 pagesRapidraw Honey AnalysistaufiqridzNo ratings yet
- Practical File AI - Class 10Document3 pagesPractical File AI - Class 10pawankvs2008No ratings yet
- Experience With The Munster-Type Below-Elbow Prosthesis, A Preliminary ReportDocument5 pagesExperience With The Munster-Type Below-Elbow Prosthesis, A Preliminary ReportrehabeasyNo ratings yet