Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- LB8 - Sci - SAMPLE CP-2Document333 pagesLB8 - Sci - SAMPLE CP-2ANUSHKA PRAKASH91% (80)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Chapter 5b Crystal Imperfections DislocationsDocument94 pagesChapter 5b Crystal Imperfections DislocationsSayantan DexNo ratings yet
- Mains Test - 14: Instructions A. General TIME: 3 Hrs. MARKS: 300Document13 pagesMains Test - 14: Instructions A. General TIME: 3 Hrs. MARKS: 300Dhruv BajajNo ratings yet
- PHD Thesis - G CreechDocument212 pagesPHD Thesis - G Creech9914102No ratings yet
- Theory of Quantum EntanglementDocument103 pagesTheory of Quantum EntanglementMark M. Wilde33% (3)
- Phy NeetDocument308 pagesPhy NeetSona Jithin100% (2)
- Momentum QuetionsDocument7 pagesMomentum Quetionsquami3quartsNo ratings yet
- Lecture 10. P-F Control 2016 PDFDocument120 pagesLecture 10. P-F Control 2016 PDFareseuroNo ratings yet
- Energy SavingDocument50 pagesEnergy SavingKuna MarndiNo ratings yet
- Catalogue Gentec-EO V2.01Document112 pagesCatalogue Gentec-EO V2.01nonoy_sgNo ratings yet
- Flow-Induced Vibration of A Flexible Circular CylinderDocument100 pagesFlow-Induced Vibration of A Flexible Circular CylinderIdayuNo ratings yet
- Wave Particle DualityWave-Particle DualityDocument4 pagesWave Particle DualityWave-Particle Dualityatom77966No ratings yet
- Organic Boca 1Document203 pagesOrganic Boca 1Karen A. RestrepoNo ratings yet
- Robert March - Instructor's Manual Physics For Poets PDFDocument22 pagesRobert March - Instructor's Manual Physics For Poets PDFJohnatan Agudelo100% (1)
- LCR Impedance MeasurementDocument81 pagesLCR Impedance MeasurementOltean DanNo ratings yet
- Saddle Crack AnalysisDocument9 pagesSaddle Crack AnalysisSiva Prasad MamillapalliNo ratings yet
- L3-Ch15 - Thermal Energy (Lesson 1)Document35 pagesL3-Ch15 - Thermal Energy (Lesson 1)Jamal RamadanNo ratings yet
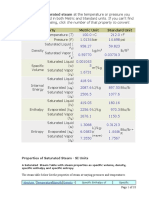
- Property Metric Unit Standard Unit: Properties of Saturated Steam - SI UnitsDocument18 pagesProperty Metric Unit Standard Unit: Properties of Saturated Steam - SI UnitsGaapchuNo ratings yet
- Xi Class Neet Q PaperDocument25 pagesXi Class Neet Q PaperAtharvNo ratings yet
- University of Cambridge International Examinations Cambridge International Level 3 Pre-U Certificate Principal SubjectDocument44 pagesUniversity of Cambridge International Examinations Cambridge International Level 3 Pre-U Certificate Principal SubjectKelvin SerimweNo ratings yet
- List of Chemical Engineering EbooksDocument19 pagesList of Chemical Engineering EbooksVikram Narendra Tanna100% (2)
- Chapter 2 Motion Along A Straight LineDocument11 pagesChapter 2 Motion Along A Straight Lineajaysahu1441No ratings yet
- Reading Comprehension 1Document2 pagesReading Comprehension 1Rohan VarshaNo ratings yet
- Integral Equation Method To Solve Dipole Antenna ParametersDocument6 pagesIntegral Equation Method To Solve Dipole Antenna ParametersSAMI UR REHMANNo ratings yet
- Basell Moplen HP500N (MI 12)Document1 pageBasell Moplen HP500N (MI 12)qshakimNo ratings yet
- Engineering Vibrations 2nd Bottega Solution ManualDocument33 pagesEngineering Vibrations 2nd Bottega Solution ManualKellyHughesarpi100% (47)
- Chapter 1Document32 pagesChapter 1Cikgu Manimaran KanayesanNo ratings yet
- Minerals Engineering: Nestor Cruz, Yongjun PengDocument14 pagesMinerals Engineering: Nestor Cruz, Yongjun PengjvchiqueNo ratings yet
- Chapter IVDocument21 pagesChapter IVAhmed BenabdellahNo ratings yet
- Fizik KiDocument9 pagesFizik KiKiTTyNo ratings yet