Download as docx, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Leslie Feinberg - Drag King Dreams-Carroll & Graf Publishers (2006)Document324 pagesLeslie Feinberg - Drag King Dreams-Carroll & Graf Publishers (2006)ce100% (3)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- BLS PDFDocument6 pagesBLS PDFAyesha JadoonNo ratings yet
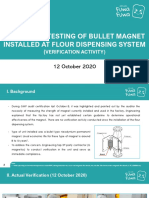
- Induction Testing of Bullet Magnet Installed at Flour Dispensing SystemDocument5 pagesInduction Testing of Bullet Magnet Installed at Flour Dispensing SystemMark Anthony Centeno100% (1)
- Mos-Installation Stainless Steel Eye Bolt Filter TankDocument5 pagesMos-Installation Stainless Steel Eye Bolt Filter Tankhabibullah.centroironNo ratings yet
- BUSINESS PROPOSALManluyang and GroupDocument9 pagesBUSINESS PROPOSALManluyang and GroupElla Mae ManluyangNo ratings yet
- EpitheliumDocument48 pagesEpitheliumdrpankaj28100% (1)
- Botanical Orign: Peppermint OilDocument4 pagesBotanical Orign: Peppermint OilSidra TariqNo ratings yet
- 11 SMAW Q4 Module 2Document11 pages11 SMAW Q4 Module 2Mark Johnson VillaronNo ratings yet
- Gobi ManchurianDocument3 pagesGobi ManchurianPriya JuligantiNo ratings yet
- Introduction of Community MedicineDocument111 pagesIntroduction of Community MedicineSanjeet SahNo ratings yet
- Reading b2 c1Document4 pagesReading b2 c1Karenza ThomasNo ratings yet
- 10: Radioactivitysmk Jati Physics Panel: Radioactive EmissionDocument16 pages10: Radioactivitysmk Jati Physics Panel: Radioactive Emissionyudrea88No ratings yet
- Suzumar Boat Engine PackagesDocument7 pagesSuzumar Boat Engine PackagesmarkoNo ratings yet
- Gas Pressure Regulator Series 240Pl: Serving The Gas Industry WorldwideDocument11 pagesGas Pressure Regulator Series 240Pl: Serving The Gas Industry WorldwideSandro RuizNo ratings yet
- Stretching ExerciesDocument2 pagesStretching ExerciesGanesh Babu100% (1)
- SeizureDocument10 pagesSeizureRomeo ReyesNo ratings yet
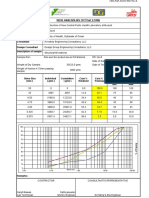
- CED-PQP-5225-F01 Rev.0 Sieve AnalysisDocument4 pagesCED-PQP-5225-F01 Rev.0 Sieve AnalysisSslan seelanNo ratings yet
- Vashikaran Mantra For Love PDFDocument4 pagesVashikaran Mantra For Love PDFmustafaaldin0% (2)
- Vaginal Discharge in DogsDocument5 pagesVaginal Discharge in DogsDarmawan Prastyo100% (1)
- Vidura Niti Snaskrit Text With English TranslationDocument217 pagesVidura Niti Snaskrit Text With English TranslationBivak BhattacharjeeNo ratings yet
- 10594-2020.04.20 - (Public Consultation) Technical Design Reference For Private Hospital DMP (UPC)Document59 pages10594-2020.04.20 - (Public Consultation) Technical Design Reference For Private Hospital DMP (UPC)LucasNo ratings yet
- CACR21 January 2015Document19 pagesCACR21 January 2015maikaNo ratings yet
- Solar Power For Beginners Basics Design and Installation of A Solar Panel System The Complete Guide For Your Off Grid HomeDocument96 pagesSolar Power For Beginners Basics Design and Installation of A Solar Panel System The Complete Guide For Your Off Grid HomeTek_nikkosNo ratings yet
- Hypogear 80W-90 - BP Australia Pty LTDDocument5 pagesHypogear 80W-90 - BP Australia Pty LTDBiju_PottayilNo ratings yet
- Bombas SumergiblesDocument79 pagesBombas SumergiblesInstinct_brNo ratings yet
- 48 Weeks To Total M-Powerment!Document18 pages48 Weeks To Total M-Powerment!sundevil2010usa4605No ratings yet
- Tugas Rapid Silvia AplianiDocument11 pagesTugas Rapid Silvia AplianiSilvia AplianiNo ratings yet
- Choose The Correct Answer by Crossing A, B, C, or D!: Test Chapter I: Greeting, Leave Taking, Thanking, and AppologizingDocument3 pagesChoose The Correct Answer by Crossing A, B, C, or D!: Test Chapter I: Greeting, Leave Taking, Thanking, and AppologizingFerdi AnsyahNo ratings yet
- Soy Source: Polarity TherapyDocument2 pagesSoy Source: Polarity TherapyrooNo ratings yet
- 5 ElementosDocument3 pages5 ElementosHectorNo ratings yet