Download as pdf or txt
You might also like
- OTDR and Fusion SplicerDocument87 pagesOTDR and Fusion Spliceroat.kmitl40No ratings yet
- Current TransformerDocument41 pagesCurrent Transformerseuth_thpc67% (3)
- Basic Alignment Training SKFDocument56 pagesBasic Alignment Training SKFPitiporn HasuankwanNo ratings yet
- obd2 แปลไทยDocument58 pagesobd2 แปลไทยSkyline Gtr100% (4)
- สรุปสูตรฟิสิกส์Document36 pagesสรุปสูตรฟิสิกส์Voravat Limpakuntorn100% (1)
- Torsion TestDocument20 pagesTorsion TestNatchapongchai KHANCHANNo ratings yet
- Vibration DiagnosisDocument22 pagesVibration DiagnosisNarong1647No ratings yet
- การทดสอบโดยไม่ทำลาย NDTDocument37 pagesการทดสอบโดยไม่ทำลาย NDTMarwellOkayNo ratings yet
- 1 RiskBaseInspectionDocument18 pages1 RiskBaseInspectionSurasan Thepsiri100% (1)
- 667 - สูตร GFRคำนวณเอง - rev 01Document2 pages667 - สูตร GFRคำนวณเอง - rev 01Manthana AngsupNo ratings yet
- 102325954 การควบคุมกระบวนการ Process ControlDocument197 pages102325954 การควบคุมกระบวนการ Process Controltomyaris100% (1)
- การวิเคราะห์คุณภาพน้ำมันDocument4 pagesการวิเคราะห์คุณภาพน้ำมันSanoa100% (1)
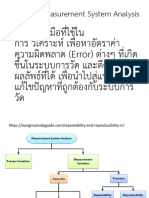
- MSA หรือ Measurement System Analysis คือDocument6 pagesMSA หรือ Measurement System Analysis คือKhanitta Tanawirattananit100% (1)
- Fmea4thedition Master 140821195625 Phpapp01 PDFDocument51 pagesFmea4thedition Master 140821195625 Phpapp01 PDFFaiq Nur ZamanNo ratings yet
- Ie Network 2017 01Document6 pagesIe Network 2017 01TonmokNo ratings yet
- การบำรุงรักษาเครื่อง CNCDocument5 pagesการบำรุงรักษาเครื่อง CNCAekJay100% (1)
- Hall SensorDocument17 pagesHall Sensormanat_swuNo ratings yet
- Vibration Monitoring and Analysis PDFDocument35 pagesVibration Monitoring and Analysis PDFtcp.mt.2015 tcpNo ratings yet
- Foundation PanelDiscussion 16oct15Document70 pagesFoundation PanelDiscussion 16oct15Subin RiankaewNo ratings yet
- M1 Group2 Sec1Document9 pagesM1 Group2 Sec1Nutdanai HassakhunpaisalNo ratings yet
- UntitledDocument15 pagesUntitledThanaphat SeangnkewNo ratings yet
- Assignment ที่7 Pijaya 64601233Document13 pagesAssignment ที่7 Pijaya 64601233Pijaya ChartpolrakNo ratings yet
- แลป Fluid Flow-กลุ่ม5Document32 pagesแลป Fluid Flow-กลุ่ม5sasitorn aubaimNo ratings yet
- การทดสอบประจำDocument6 pagesการทดสอบประจำ1631010841133No ratings yet
- 001 Tx49 PDFDocument91 pages001 Tx49 PDFLaTeX555No ratings yet
- PM 20220420Document98 pagesPM 20220420Vegakung PhoenixNo ratings yet
- ระบบกำจัดแก๊สคลอรีนDocument5 pagesระบบกำจัดแก๊สคลอรีนapi-3772330No ratings yet
- Pbl-อรรถพล ปานพรม r1Document23 pagesPbl-อรรถพล ปานพรม r1Somkid BoonsukNo ratings yet
- Mitsubishi - 3phase + DirectDocument2 pagesMitsubishi - 3phase + DirectZuph SumpanchaivasuNo ratings yet
- วิธีวัดอัตราการไหลอากาศDocument61 pagesวิธีวัดอัตราการไหลอากาศNiti KlinKaewNo ratings yet
- Report GasLaw 2022 v4 DoneDocument3 pagesReport GasLaw 2022 v4 DonePongsathon PINPUEKNo ratings yet
- 84420-Article Text-204523-1-10-20170424 PDFDocument10 pages84420-Article Text-204523-1-10-20170424 PDFชนพัทธ์ คงพ่วงNo ratings yet
- คำนวณใบกังหันลม PDFDocument5 pagesคำนวณใบกังหันลม PDFsaravoot_jNo ratings yet
- Ex Short PaperDocument8 pagesEx Short Paperเกศมณี เกษมุติNo ratings yet
- Rigid Body MotionDocument83 pagesRigid Body Motionthelassname1232No ratings yet
- แลปอ อัม-กลุ่ม5Document31 pagesแลปอ อัม-กลุ่ม5sasitorn aubaimNo ratings yet
- Wave ShapingDocument9 pagesWave ShapingRinn SinthunavaratNo ratings yet
- 04 - High Voltage Testing PDFDocument71 pages04 - High Voltage Testing PDFฉันมองเธอ แต่เธอไม่เคยมองฉันสักที ทุกครั้งที่เจอกันNo ratings yet
- Imp 0004 PDFDocument24 pagesImp 0004 PDFATUL SONAWANENo ratings yet
- หน่วย,ขนาด,และมาตรฐานไฟฟ้าDocument17 pagesหน่วย,ขนาด,และมาตรฐานไฟฟ้าเนติ สุภาพรเหมินทร์No ratings yet
- การเปลี่ยนรอบมอเตอร์ด้วยการเปลี่ยนโพลDocument5 pagesการเปลี่ยนรอบมอเตอร์ด้วยการเปลี่ยนโพลpaween saetaeNo ratings yet
- Assignment ที่1 Pijaya 64601233Document5 pagesAssignment ที่1 Pijaya 64601233Pijaya ChartpolrakNo ratings yet
- วิชาอุปกรณ์อิเล็กทรอนิกส์และวงจรDocument115 pagesวิชาอุปกรณ์อิเล็กทรอนิกส์และวงจรPongpakorn LPNo ratings yet
- Vibration PSIDocument25 pagesVibration PSIVegakung PhoenixNo ratings yet
- เนื้อหาบท1-5 UltrasonicDocument36 pagesเนื้อหาบท1-5 UltrasonicsombatNo ratings yet
- 4 อัลตร้าโซนิค PDFDocument36 pages4 อัลตร้าโซนิค PDFAbhinant PetchngamjaratNo ratings yet
- ข้อกำหนดกฎเกณฑ์แรงดันกระเพื่อมเกี่ยวกับไฟฟ้าประเภทธุรกิจและอุตสาหกรรมDocument18 pagesข้อกำหนดกฎเกณฑ์แรงดันกระเพื่อมเกี่ยวกับไฟฟ้าประเภทธุรกิจและอุตสาหกรรมlittleomNo ratings yet
- Lab4 G7Document18 pagesLab4 G7A ArtNo ratings yet
- MEA Harmonic StandardsDocument19 pagesMEA Harmonic StandardstjnoonNo ratings yet
- Basic Vibration REV.03Document69 pagesBasic Vibration REV.03ball.oa.llabNo ratings yet
- À À À À À À À À À À UV VisSpectrophotometer2 2565upload 3Document11 pagesÀ À À À À À À À À À UV VisSpectrophotometer2 2565upload 3Ammanee Deesaeh (Krisyeol)No ratings yet
- บทที่ 2 การเคลื่อนที่ในแนวเส้นตรงDocument21 pagesบทที่ 2 การเคลื่อนที่ในแนวเส้นตรงวราภรณ์ ปริวันตาNo ratings yet
- Law of Motion-7-16Document10 pagesLaw of Motion-7-16Danuphong JaikongNo ratings yet
- บทที่ 5 การควบคุมความเร็วและการสตาร์ทของมอเตอร์เหนี่ยวนาสามเฟสDocument27 pagesบทที่ 5 การควบคุมความเร็วและการสตาร์ทของมอเตอร์เหนี่ยวนาสามเฟสชัยโชค คงชูดีNo ratings yet
- Assignment ที่6 Pijaya 64601233Document12 pagesAssignment ที่6 Pijaya 64601233Pijaya ChartpolrakNo ratings yet
- 24 ตัวอย่างกรณีศึกษาของการไฟฟ้าส่วนภูมิภาค แนวทางการตรวจสอบ หาตำแหน่งฟอลต์ - คุณณัฐกรDocument65 pages24 ตัวอย่างกรณีศึกษาของการไฟฟ้าส่วนภูมิภาค แนวทางการตรวจสอบ หาตำแหน่งฟอลต์ - คุณณัฐกรpimsuwaNo ratings yet
- High Speed Sheet Metal RollerDocument32 pagesHigh Speed Sheet Metal RollerChaiyuth ArmyforceNo ratings yet
- Homework and Examples O&M SittipongDocument24 pagesHomework and Examples O&M SittipongSirilak KlakwongNo ratings yet
- TF SeriesDocument70 pagesTF SeriesIsarat SangksmaneeNo ratings yet
- 0392-65 Infrared Camera FLIR Systems T650SC-61PC2-SSRD-0446Document20 pages0392-65 Infrared Camera FLIR Systems T650SC-61PC2-SSRD-0446Setthawoot ChaiwisetNo ratings yet