Download as pdf or txt
You might also like
- Auto Tuning PID Controller Using Chaotic PSO Algorithm For A Boost ConverterDocument6 pagesAuto Tuning PID Controller Using Chaotic PSO Algorithm For A Boost ConverterAbhimanyu YadavNo ratings yet
- 15766-WASJ Wasj-205eDocument6 pages15766-WASJ Wasj-205eThiaga RajanNo ratings yet
- An Optimum Setting of Controller For A DC-DC Converter Using Bacterial Intelligence TechniqueDocument7 pagesAn Optimum Setting of Controller For A DC-DC Converter Using Bacterial Intelligence TechniqueGlan DevadhasNo ratings yet
- 16 Swati Sikarwar @amolDocument4 pages16 Swati Sikarwar @amolAhmad MqdadNo ratings yet
- A Transformerless Buck-Boost Converter With PID ControllerDocument7 pagesA Transformerless Buck-Boost Converter With PID ControllerSohaib ChoudharyNo ratings yet
- Autotuning Fuzzy PID Controller For Speed Control of BLDC MotorDocument8 pagesAutotuning Fuzzy PID Controller For Speed Control of BLDC MotorZikra ElninoNo ratings yet
- Digital Linear and Nonlinear Controllers For Buck Converter: Shyama M, P.SwaminathanDocument7 pagesDigital Linear and Nonlinear Controllers For Buck Converter: Shyama M, P.SwaminathanFABIANCHO2210No ratings yet
- Time Domain Based Digital PWM Controller For DC-DC ConverterDocument12 pagesTime Domain Based Digital PWM Controller For DC-DC ConverterTetiHidayatiNo ratings yet
- Energies: Fractional-Order Approximation and Synthesis of A PID Controller For A Buck ConverterDocument17 pagesEnergies: Fractional-Order Approximation and Synthesis of A PID Controller For A Buck Converterkarim belaliaNo ratings yet
- Temperature Control Water Bath System Using PID ControllerDocument5 pagesTemperature Control Water Bath System Using PID Controllerprapya pokharelNo ratings yet
- Study of Fuzzy Logic and Pid Controller in Buck-Boost ConverterDocument4 pagesStudy of Fuzzy Logic and Pid Controller in Buck-Boost ConverterijsretNo ratings yet
- Ijca March 2012 OhgDocument18 pagesIjca March 2012 OhgDr O H GuptaNo ratings yet
- DC-DC Power Converter With Digital PID ControllerDocument4 pagesDC-DC Power Converter With Digital PID ControllerAmritaSinghNo ratings yet
- Real Time Speed Control of DC Motor With Unknown Transfer Function Through PIDDocument6 pagesReal Time Speed Control of DC Motor With Unknown Transfer Function Through PIDArbab HaiderNo ratings yet
- Seminar ReportDocument23 pagesSeminar ReportSwapnil Behera100% (1)
- PID Controller Based DC Motor Speed ControlDocument4 pagesPID Controller Based DC Motor Speed ControlEditor IJRITCCNo ratings yet
- Speed Response of Brushless DC Motor Using Fuzzy Pid Controller Under Varying Load ConditionDocument23 pagesSpeed Response of Brushless DC Motor Using Fuzzy Pid Controller Under Varying Load ConditionJurgen CokuNo ratings yet
- Control Sysytems by SuklaDocument51 pagesControl Sysytems by Suklavinay kumar MNo ratings yet
- Temperature Control Waterbath Control System Using PID ControllerDocument5 pagesTemperature Control Waterbath Control System Using PID ControllerReno Sandy YusufNo ratings yet
- Modelling and Advance Control Techniques For DC-DC Converter With Improve PerformanceDocument4 pagesModelling and Advance Control Techniques For DC-DC Converter With Improve PerformanceerpublicationNo ratings yet
- Performance Analysis of Fuzzy Logic Controlled DC-DC Converters - OKDocument7 pagesPerformance Analysis of Fuzzy Logic Controlled DC-DC Converters - OKREYES APOLONIO CASTRO CORRALNo ratings yet
- 41 Ijmtst0709093Document5 pages41 Ijmtst0709093Thức HoàngNo ratings yet
- Ijetae 0913 69Document6 pagesIjetae 0913 69Lucian Mihai BiltiuNo ratings yet
- PID Controller Modifications To Improve Steady-State Performance of Digital Controllers For Buck and Boost ConvertersDocument8 pagesPID Controller Modifications To Improve Steady-State Performance of Digital Controllers For Buck and Boost Convertersprasanna workcloudNo ratings yet
- DC/DC Converter Control Using Suggested Artificial Intelligent ControllersDocument11 pagesDC/DC Converter Control Using Suggested Artificial Intelligent ControllersIAES IJAINo ratings yet
- The Fuzzy-PID Control of Brushless DC Motor: Jianli Jing, Yanchun Wang and Yinghui HuangDocument5 pagesThe Fuzzy-PID Control of Brushless DC Motor: Jianli Jing, Yanchun Wang and Yinghui HuangBudi NofiantoNo ratings yet
- How Does A PID Controller Work - Structure & Tuning MethodsDocument12 pagesHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984No ratings yet
- A Closed Loop Control Strategy of Transformer-Less Buck-Boost Converter With PID ControllerDocument7 pagesA Closed Loop Control Strategy of Transformer-Less Buck-Boost Converter With PID Controllerbhawna guptaNo ratings yet
- 8 Chapter-1Document3 pages8 Chapter-1Bart llNo ratings yet
- Flyback Converter Controlled by Arduino Uno: Journal of TechniquesDocument11 pagesFlyback Converter Controlled by Arduino Uno: Journal of TechniquesHuy Khôi HàNo ratings yet
- v4 342 349 PDFDocument8 pagesv4 342 349 PDFGlan DevadhasNo ratings yet
- Pid Closed-Loop Control System Based On S7-300 PLC: LI Xin, LEI Ju-YangDocument5 pagesPid Closed-Loop Control System Based On S7-300 PLC: LI Xin, LEI Ju-YangChethan GowdaNo ratings yet
- PID ControllersDocument9 pagesPID Controllerszs94qjqcx7No ratings yet
- ISSN No: 2456: International Open Access Journal International Open Access JournalDocument4 pagesISSN No: 2456: International Open Access Journal International Open Access JournalEditor IJTSRDNo ratings yet
- DC Motor Speed Control: A Case Between PID Controller and Fuzzy Logic ControllerDocument6 pagesDC Motor Speed Control: A Case Between PID Controller and Fuzzy Logic ControllerFirman IlyasNo ratings yet
- Simple and Effective Digital Control of A Variable-Speed Low Inductance BLDC Motor DriveDocument11 pagesSimple and Effective Digital Control of A Variable-Speed Low Inductance BLDC Motor DriveVidhya M PNo ratings yet
- A125703 288 PDFDocument7 pagesA125703 288 PDFAnonymous G04WC68JXfNo ratings yet
- Controller Design For Temperature Control of Heat Exchanger System: Simulation StudiesDocument7 pagesController Design For Temperature Control of Heat Exchanger System: Simulation StudiesAnonymous G04WC68JXfNo ratings yet
- Design and Analysis of Closed Loop Interleaved Boost Converter With Arduino Based Soft PI Controller For Photovoltiac ApplicationDocument5 pagesDesign and Analysis of Closed Loop Interleaved Boost Converter With Arduino Based Soft PI Controller For Photovoltiac ApplicationNtokozo HlatshwayoNo ratings yet
- Buck Boost ProjectDocument24 pagesBuck Boost ProjectRonald LugwireNo ratings yet
- Digital Control Project Temperature Control Using PIDDocument9 pagesDigital Control Project Temperature Control Using PIDاسعد الماوريNo ratings yet
- IJETR2228Document7 pagesIJETR2228anil kasotNo ratings yet
- GAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFDocument6 pagesGAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFGlan DevadhasNo ratings yet
- Microsoft Word - 11-11-008 PDFDocument10 pagesMicrosoft Word - 11-11-008 PDFbhulakshmideviNo ratings yet
- DCDCDocument10 pagesDCDCilet09No ratings yet
- Thermal Characteristics of Pid Controller Water HeaterDocument10 pagesThermal Characteristics of Pid Controller Water HeaterEhab QabashNo ratings yet
- Pid Controller Literature ReviewDocument4 pagesPid Controller Literature Reviewc5rzknsg100% (1)
- ABB PID ControlDocument21 pagesABB PID Controlciocioi iancuNo ratings yet
- CH 2Document48 pagesCH 2Endalew kassahunNo ratings yet
- Design, Modelling and Implementation of Interleaved Boost DC-DC ConverterDocument13 pagesDesign, Modelling and Implementation of Interleaved Boost DC-DC ConverterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- FuzzyControllersforBoostDC-DCConvertersDocument8 pagesFuzzyControllersforBoostDC-DCConvertersAnthony Sazon TolentinoNo ratings yet
- Modeling and Simulation On Fuzzy-PID Position Controller of Electro Hydraulic Servo SystemDocument6 pagesModeling and Simulation On Fuzzy-PID Position Controller of Electro Hydraulic Servo Systempolat035No ratings yet
- ADITIDocument38 pagesADITIgarima pariyaniNo ratings yet
- Ismail 2010Document6 pagesIsmail 2010ireshnNo ratings yet
- ModelingDocument23 pagesModelingtdquan2003No ratings yet
- Hardware in The Loop Simulation of Direct Synthesis Based Two Degree of Freedom PID Control of DC-DC Boost Converter Using Real Time Digital Simulation in FPGADocument5 pagesHardware in The Loop Simulation of Direct Synthesis Based Two Degree of Freedom PID Control of DC-DC Boost Converter Using Real Time Digital Simulation in FPGADr Tarakanath KobakuNo ratings yet
- DC Motor Speed Control Using PID Controller in Lab View: January 2015Document5 pagesDC Motor Speed Control Using PID Controller in Lab View: January 2015EngidNo ratings yet
- FinalPaperDesign and Simulation of PID Controller For Power Electronics Converter Circuits170541Document6 pagesFinalPaperDesign and Simulation of PID Controller For Power Electronics Converter Circuits170541annaNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Moral Stories - Situated Reasoning About Norms, Intents, Actions, and Their Consequences 2012.15738Document21 pagesMoral Stories - Situated Reasoning About Norms, Intents, Actions, and Their Consequences 2012.15738Zhu XUNo ratings yet
- Lesson Plan in Science 1.3Document38 pagesLesson Plan in Science 1.3Heidi Dalyagan DulnagonNo ratings yet
- Ag Test Package FormatDocument25 pagesAg Test Package FormatoparoystNo ratings yet
- Delayed Hospital Discharges of Older Patients A Systematic Review On Prevalence and CostsDocument12 pagesDelayed Hospital Discharges of Older Patients A Systematic Review On Prevalence and CostsGabriela ObonNo ratings yet
- Commercial Negotiations NotesDocument14 pagesCommercial Negotiations NotesJoan Foster100% (1)
- SAP Kernel 720Document24 pagesSAP Kernel 720rajaraobhmNo ratings yet
- Dibrugarh AirportDocument30 pagesDibrugarh AirportRafikul RahemanNo ratings yet
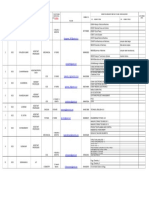
- 2127 - Mahatma Gandhi Missions College of Engineering, Hingoli RD, NandedDocument8 pages2127 - Mahatma Gandhi Missions College of Engineering, Hingoli RD, NandedAjit DeshmukhNo ratings yet
- Soal Uas Ganjil SMK XiDocument2 pagesSoal Uas Ganjil SMK Xibondan iskandarNo ratings yet
- SK 135 SR 3Document327 pagesSK 135 SR 3Trung Cuong100% (1)
- Month + Teaching Days Unit Total Teaching Periods: Vibgyor High Grade - 2 English Literature Year Plan (AY 2020 - 2021)Document65 pagesMonth + Teaching Days Unit Total Teaching Periods: Vibgyor High Grade - 2 English Literature Year Plan (AY 2020 - 2021)TAPASsenguptaNo ratings yet
- Model Course 1.07 PDFDocument75 pagesModel Course 1.07 PDFShiena CamineroNo ratings yet
- Psychosocial Support Activity Sheet No. 2Document2 pagesPsychosocial Support Activity Sheet No. 2Rizza De MesaNo ratings yet
- E4nb71 PDFDocument99 pagesE4nb71 PDFtambache69100% (1)
- The Development of Self-Regulation Across Early ChildhoodDocument37 pagesThe Development of Self-Regulation Across Early ChildhoodvickyreyeslucanoNo ratings yet
- ADSS StandardDocument17 pagesADSS StandardHedi HmidaNo ratings yet
- Physics Lab Heat and HumidityDocument3 pagesPhysics Lab Heat and HumidityLAUREN YAPNo ratings yet
- Razones de CambioDocument1 pageRazones de CambioCarlos FloresNo ratings yet
- 3 Generations of Human RightsDocument1 page3 Generations of Human RightsDzenan HakalovicNo ratings yet
- 12B TB Book PDF-1 PDFDocument113 pages12B TB Book PDF-1 PDFامل العودة طالب100% (1)
- Corrosion Detection Midterm LessonDocument52 pagesCorrosion Detection Midterm LessonVv ZoidNo ratings yet
- Astm A194Document11 pagesAstm A194Jarek CieslakNo ratings yet
- Thermicam: The World'S First Integrated Thermal Traffic SensorDocument2 pagesThermicam: The World'S First Integrated Thermal Traffic SensorSudipta BhadraNo ratings yet
- 900FH&1000FH TurbinesDocument12 pages900FH&1000FH TurbinesRyanNo ratings yet
- THE Cost OF Delay IN ConstructionDocument3 pagesTHE Cost OF Delay IN ConstructionJonathan WallaceNo ratings yet
- Newsela - A New Boredom Study Is Anything But BoringDocument3 pagesNewsela - A New Boredom Study Is Anything But Boringafolden91683No ratings yet
- Renewable Energy Sources and MethodsDocument225 pagesRenewable Energy Sources and MethodsSemir Đedović100% (1)
- Staff Data Format-AUCDocument1 pageStaff Data Format-AUCSenthil KumarNo ratings yet
- Demography Is The: Statistical Study Human PopulationDocument17 pagesDemography Is The: Statistical Study Human PopulationYash SejpalNo ratings yet
- Pearl Brochure SinglePageScroll A4 New Claim Final 10 05.ENDocument8 pagesPearl Brochure SinglePageScroll A4 New Claim Final 10 05.ENlassanac85No ratings yet