Download as pdf or txt
You might also like
- Study of Dividing HeadsDocument10 pagesStudy of Dividing HeadsChandan SrivastavaNo ratings yet
- Unit I&Unit IIDocument45 pagesUnit I&Unit IIArun kumar jaiswalNo ratings yet
- Chapter 21Document28 pagesChapter 21vishal_16278No ratings yet
- CH 1 IntroDocument7 pagesCH 1 IntroChawki WikiNo ratings yet
- ES QA NotesDocument91 pagesES QA NotesPratik PatilNo ratings yet
- Modified New Embedded SystemsDocument36 pagesModified New Embedded SystemsPriya KosuriNo ratings yet
- MicroprocessorsDocument25 pagesMicroprocessorsKarneshwar SannamaniNo ratings yet
- Syit Es CH2Document24 pagesSyit Es CH2truptiNo ratings yet
- Module 1Document12 pagesModule 1PrathameshNo ratings yet
- Embedded and Real-Time Operating Systems: Course Code: 70439Document76 pagesEmbedded and Real-Time Operating Systems: Course Code: 70439SrikanthNo ratings yet
- CH 2Document59 pagesCH 2gcrossnNo ratings yet
- Embedded Systems (All Units)Document250 pagesEmbedded Systems (All Units)ezhiltham0% (2)
- EIOT Unit 1Document10 pagesEIOT Unit 1209X1A04D2 SHAIK ASMANo ratings yet
- Embedded SystemsDocument143 pagesEmbedded SystemsRajesh RmsNo ratings yet
- Unit 1 EsDocument29 pagesUnit 1 EsSree MathyNo ratings yet
- Lecture1 - Introduction To Embbeded System DesignDocument29 pagesLecture1 - Introduction To Embbeded System DesignĐức Anh CNo ratings yet
- 16 MarksDocument51 pages16 MarkssamNo ratings yet
- ES - 2 Marks Questions-1Document17 pagesES - 2 Marks Questions-1DurgadeviNo ratings yet
- Embedded SystemDocument150 pagesEmbedded SystemAnup MaharjanNo ratings yet
- Embedded Systems: Department of Electrical and Computer Engineering MWU UniversityDocument40 pagesEmbedded Systems: Department of Electrical and Computer Engineering MWU UniversitySamuel AdamuNo ratings yet
- ES Notes1 (R19) IV ECE 1-2 UNITSDocument66 pagesES Notes1 (R19) IV ECE 1-2 UNITSgootydhanalakshmi2003No ratings yet
- Fatima Michael College of Engineering & Technology: UNIT-1 Embedded Computing Two MarksDocument23 pagesFatima Michael College of Engineering & Technology: UNIT-1 Embedded Computing Two MarksrameshdurairajNo ratings yet
- Course FileDocument36 pagesCourse FileElakkiya N.SNo ratings yet
- 5 2marksDocument22 pages5 2marksElakkiya N.SNo ratings yet
- U-5 HalfDocument218 pagesU-5 HalfK.P.Revathi Asst prof - IT DeptNo ratings yet
- RAILWAY TRACK SECURITY SYSTEM DOCUMENTATION 23 (2) - For MergeDocument53 pagesRAILWAY TRACK SECURITY SYSTEM DOCUMENTATION 23 (2) - For MergeShravya 459No ratings yet
- Chapter-1 Introduction To Embedded SystemsDocument4 pagesChapter-1 Introduction To Embedded SystemsShivani NomulaNo ratings yet
- Embedded Systems: Lecture NotesDocument164 pagesEmbedded Systems: Lecture NotesDeepak KumarNo ratings yet
- Embedded SystemsDocument3 pagesEmbedded SystemsRavi KumarNo ratings yet
- Embedded Systems - Question Bank (AU-CBE, ECE-R2007)Document36 pagesEmbedded Systems - Question Bank (AU-CBE, ECE-R2007)Dr. N.ShanmugasundaramNo ratings yet
- Minor LastDocument67 pagesMinor LastMusharraf AliNo ratings yet
- Microcontrollers and Embedded SystemsDocument35 pagesMicrocontrollers and Embedded SystemsTarek BarhoumNo ratings yet
- Lecture 2 - Typical Embedded SystemDocument5 pagesLecture 2 - Typical Embedded SystemrhodonelduatinNo ratings yet
- Es Notes Unit 1Document20 pagesEs Notes Unit 1Sai ReddyNo ratings yet
- 3-Overview of Embedded Systems-05!01!2024Document107 pages3-Overview of Embedded Systems-05!01!2024kx.graphyNo ratings yet
- Ece Embed Ed SystemDocument27 pagesEce Embed Ed SystemlakshmigajendranNo ratings yet
- Iot Unit 2Document87 pagesIot Unit 2SRHNo ratings yet
- 1 Unit Es PrintedDocument39 pages1 Unit Es Printedsrinivasarao vuppanapalliNo ratings yet
- Embedded SystemDocument49 pagesEmbedded SystemcutesuryaNo ratings yet
- Embedded SystemsDocument145 pagesEmbedded SystemsAarthi PandianNo ratings yet
- Embedded Systems Unit 2Document78 pagesEmbedded Systems Unit 2ravibabukancharlaNo ratings yet
- 21CS43 MCES Module4Document57 pages21CS43 MCES Module4webprogram32No ratings yet
- Unit 4 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDocument6 pagesUnit 4 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDEFENCE MOTIVATIONNo ratings yet
- Introduction To Embedded Systems ByshibukvDocument36 pagesIntroduction To Embedded Systems ByshibukvNyein NyeinNo ratings yet
- Unit - 1 Introduction To Embedded SystemsDocument23 pagesUnit - 1 Introduction To Embedded Systemssrinivasarao vuppanapalliNo ratings yet
- EmbededsystemDocument31 pagesEmbededsystemsonalNo ratings yet
- Architecture of SoCDocument25 pagesArchitecture of SoCsatyam jadhavNo ratings yet
- EE6602 2 Marks With Answer KeyDocument20 pagesEE6602 2 Marks With Answer KeyLogesh50% (2)
- Es Module1 NotesDocument22 pagesEs Module1 NotesVidhya Mohanan0% (1)
- UNIT-1 Embedded Computing Two Marks: 2. in What Ways CISC and RISC Processors Differ?Document23 pagesUNIT-1 Embedded Computing Two Marks: 2. in What Ways CISC and RISC Processors Differ?rajeshkumardhandapanNo ratings yet
- Unit-I Introduction: 1.1 Embedded System (E.S)Document4 pagesUnit-I Introduction: 1.1 Embedded System (E.S)lucky jNo ratings yet
- Unit-I Introduction To Embedded SystemsDocument117 pagesUnit-I Introduction To Embedded SystemsDeepak KumarNo ratings yet
- Iare EsdDocument117 pagesIare EsdgirishgandhiNo ratings yet
- Presentation of 8051Document178 pagesPresentation of 8051sivar22No ratings yet
- Embedded Systems Notes Related To CIE-1Document16 pagesEmbedded Systems Notes Related To CIE-130035ravi KumarNo ratings yet
- 5 - Embedded SystemsDocument53 pages5 - Embedded Systemsحساب ويندوزNo ratings yet
- Lecture Note - Embedded System and MicrocontrollerDocument29 pagesLecture Note - Embedded System and MicrocontrollerIkechukwu OkaforNo ratings yet
- Introduction To: Embedded SystemDocument122 pagesIntroduction To: Embedded Systemkrishna sNo ratings yet
- 3 Design Challenges, 05-01-2024Document74 pages3 Design Challenges, 05-01-2024kx.graphyNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsFrom EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsRating: 3 out of 5 stars3/5 (1)
- Computer Graphics and Animation: Focusing System Magnetic Deflection Coils CathodeDocument24 pagesComputer Graphics and Animation: Focusing System Magnetic Deflection Coils CathodeNilesh GuptaNo ratings yet
- Solution Set of AWP Solution Set November-2018Document21 pagesSolution Set of AWP Solution Set November-2018Nilesh GuptaNo ratings yet
- (2 Hours) Total Marks: 75: Cathode Ray TubeDocument25 pages(2 Hours) Total Marks: 75: Cathode Ray TubeNilesh GuptaNo ratings yet
- COST SolnDocument13 pagesCOST SolnNilesh GuptaNo ratings yet
- 12 Controlling PDFDocument8 pages12 Controlling PDFハンター ジェイソンNo ratings yet
- 2Document4 pages2Tarun BhatiaNo ratings yet
- A Comparative Study of Revenue Assurance vs. Data Warehousing PDFDocument8 pagesA Comparative Study of Revenue Assurance vs. Data Warehousing PDFVaidehi Vaibhav NagvekarNo ratings yet
- What Is CAS CCS and R2Document3 pagesWhat Is CAS CCS and R2hemantsajwanNo ratings yet
- Transmission: CVT (Continuous Variable Transmission)Document5 pagesTransmission: CVT (Continuous Variable Transmission)karthikozyNo ratings yet
- Maven + JSF + RichFaces + JDBC + JXL API For Excel Export (Using Maven Project in Eclipse IDE)Document16 pagesMaven + JSF + RichFaces + JDBC + JXL API For Excel Export (Using Maven Project in Eclipse IDE)nikhilbhalwankar1883No ratings yet
- Method Statement For Survey Monitoring of Excavated SlopesDocument20 pagesMethod Statement For Survey Monitoring of Excavated Slopesmohamedamine.zemouriNo ratings yet
- Centrum &magnum C-3000Document12 pagesCentrum &magnum C-3000ศูนย์เครื่องจักรบางบอนโดยวงศ์ธนาวุฒิNo ratings yet
- Haldex InformationDocument8 pagesHaldex InformationFernando PadillaNo ratings yet
- Form 4 Physics Chapter 2.10-2.12 - Student'sDocument10 pagesForm 4 Physics Chapter 2.10-2.12 - Student'sPavithiranNo ratings yet
- Sony MDR-7506 Service ManualDocument4 pagesSony MDR-7506 Service ManualSamZagamiNo ratings yet
- Door Wired AxtraxDocument5 pagesDoor Wired Axtraxsoft42ansNo ratings yet
- Advanced Proxy Add-On For IPCop and SmoothWallDocument5 pagesAdvanced Proxy Add-On For IPCop and SmoothWallbayyouNo ratings yet
- Control Valve 16 - 8230usa-GS3Document6 pagesControl Valve 16 - 8230usa-GS3Amin De Rossi SudrajatNo ratings yet
- Ideal Gas Law With ExamplesDocument10 pagesIdeal Gas Law With Examplesayan hazarikaNo ratings yet
- KS180 Badestnost От 1 До 12 СекцийDocument7 pagesKS180 Badestnost От 1 До 12 СекцийДаниил СторчеусNo ratings yet
- SBM Tool-Div Field TA TeamDocument12 pagesSBM Tool-Div Field TA TeamGeoffrey Tolentino-UnidaNo ratings yet
- Case Study 5-1-WPS OfficeDocument7 pagesCase Study 5-1-WPS OfficeManahil ZubairNo ratings yet
- Din 743 E-AssisstDocument24 pagesDin 743 E-AssisstSezgin BayrakNo ratings yet
- Mo (3330502) Final AssignmentDocument8 pagesMo (3330502) Final Assignmentapi-269508649100% (3)
- sl2019 671Document7 pagessl2019 671Stefas DimitriosNo ratings yet
- List of 430 Companies With HR Head 8 PDF FreeDocument42 pagesList of 430 Companies With HR Head 8 PDF FreeSamiNo ratings yet
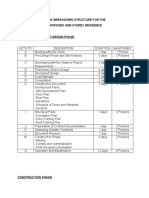
- Work Breakdown Structure For The Proposed One-Storey ResidenceDocument2 pagesWork Breakdown Structure For The Proposed One-Storey ResidenceRania Mae BalmesNo ratings yet
- 8085 Microprocessor Architecture and Programming-1Document92 pages8085 Microprocessor Architecture and Programming-1ShubhamNo ratings yet
- SPSS ImplicationsDocument3 pagesSPSS ImplicationsAnonymous MMNqiyxBUNo ratings yet
- A6V10225306 Fire Detection System Lightning ProtectionDocument32 pagesA6V10225306 Fire Detection System Lightning ProtectionerfanmasoudiNo ratings yet
- Ce T60D eDocument7 pagesCe T60D eMøąđ ĄllibýNo ratings yet
- The Problem of Escape From The Earth by RocketDocument10 pagesThe Problem of Escape From The Earth by RocketKanishka Lankatillake100% (1)
- ABC CostingDocument5 pagesABC CostingMike RobmonNo ratings yet