Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5835)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Etap SoftwareDocument4 pagesEtap SoftwaresurajNo ratings yet
- Enterprise IT at CiscoDocument3 pagesEnterprise IT at CiscoroyalmechnoNo ratings yet
- Anfis (Adaptive Network Fuzzy Inference System) : G.AnuradhaDocument25 pagesAnfis (Adaptive Network Fuzzy Inference System) : G.Anuradhamodis777No ratings yet
- 2012 1161. Neuro Fuzzy SystemsDocument72 pages2012 1161. Neuro Fuzzy SystemslutfijuharNo ratings yet
- A Pedagogy of Play: Integrating Computer Games Into The Writing ClassroomDocument13 pagesA Pedagogy of Play: Integrating Computer Games Into The Writing ClassroomlutfijuharNo ratings yet
- 2012 1161. Neuro Fuzzy SystemsDocument72 pages2012 1161. Neuro Fuzzy SystemslutfijuharNo ratings yet
- Distributor - Perkins Extended Life Coolant PresentationDocument11 pagesDistributor - Perkins Extended Life Coolant PresentationPritish147No ratings yet
- WORKSHEET - Lab EquipmentDocument2 pagesWORKSHEET - Lab EquipmentRaynaleese RivasNo ratings yet
- GEOGUIDE5 - Guide To Slope Maintenance (TOC)Document13 pagesGEOGUIDE5 - Guide To Slope Maintenance (TOC)Azmi AshariNo ratings yet
- Overview of Block Chain Cross Chain TechnologyDocument4 pagesOverview of Block Chain Cross Chain TechnologyHasan Al-AbadiNo ratings yet
- Chapter 27 - AnswerDocument21 pagesChapter 27 - AnswerAnonymous CuUAaRSNNo ratings yet
- Design of Prestressed Concrete Piles For Seismic Loads Adds A NewDocument3 pagesDesign of Prestressed Concrete Piles For Seismic Loads Adds A NewMahindaNo ratings yet
- Solidedge - User Guide Solid EdgeDocument574 pagesSolidedge - User Guide Solid Edge800810No ratings yet
- Fassi F210a.25Document78 pagesFassi F210a.25Aleixandre GomezNo ratings yet
- Rectangular Break Line: 1. Purpose and DescriptionDocument5 pagesRectangular Break Line: 1. Purpose and DescriptionNico InfanteNo ratings yet
- Large-Scale Experimental Lateral Torsional Buckling Tests of Welded I-Section MembersDocument20 pagesLarge-Scale Experimental Lateral Torsional Buckling Tests of Welded I-Section Membersjackcan501No ratings yet
- Introduction To Electrical and Computer Engineering Lab ManualDocument124 pagesIntroduction To Electrical and Computer Engineering Lab Manualkstu1112No ratings yet
- S S H L: Mall-Cale Ydrodynamics in AkesDocument42 pagesS S H L: Mall-Cale Ydrodynamics in Akesbrian790No ratings yet
- S-10 15Document2 pagesS-10 15Raghavendra MurthyNo ratings yet
- Profiled Metal Roofing DesignDocument32 pagesProfiled Metal Roofing DesignEJourDNo ratings yet
- E-R Diagram in DBMS DBMS Tutorial StudytonightDocument8 pagesE-R Diagram in DBMS DBMS Tutorial Studytonightkamaraj anishNo ratings yet
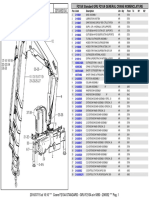
- fr601 607Document2 pagesfr601 607Tamas VorosNo ratings yet
- LMC Fast-Set FFG Pp1, Pp2, Pp3 20240301Document84 pagesLMC Fast-Set FFG Pp1, Pp2, Pp3 20240301aquila tanuwijayaNo ratings yet
- IGNOU Grade CardDocument1 pageIGNOU Grade CardPrashant BNo ratings yet
- Manual Simatic S7-200 em 1hDocument53 pagesManual Simatic S7-200 em 1hbigopostNo ratings yet
- SDM630MV CT Modbus Manual - GoodMeasure StoreDocument21 pagesSDM630MV CT Modbus Manual - GoodMeasure StoreKunanon JaitrongNo ratings yet
- X 25Document4 pagesX 25Neeti Saurav Pahuja100% (1)
- SPE-200168-MS (Aramco - Gas Choking)Document11 pagesSPE-200168-MS (Aramco - Gas Choking)Alfonso RamosNo ratings yet
- TensimeterDocument4 pagesTensimeterAi Loko100% (4)
- Assignment 8 SolutionDocument8 pagesAssignment 8 SolutionSrinivas ShareNo ratings yet
- Bsi BS en 60974-2 - 2013Document22 pagesBsi BS en 60974-2 - 2013alferedNo ratings yet
- LKF7114EXFR: Model TypeDocument10 pagesLKF7114EXFR: Model TypeGustavo ValdezNo ratings yet
- Airport BussinesDocument56 pagesAirport Bussinesjonmrx001No ratings yet
- Ds SOLIDserver DDI EN 190204 PDFDocument6 pagesDs SOLIDserver DDI EN 190204 PDFGhanshyam YadavaNo ratings yet