Download as pdf or txt
You might also like
- VM 2.5 ManualDocument49 pagesVM 2.5 Manualjeepfreak212185% (20)
- Slides For S4 Advanced Available To Promise aATPDocument38 pagesSlides For S4 Advanced Available To Promise aATPMurali KrishnanNo ratings yet
- Turning TorsoDocument25 pagesTurning TorsoEmime Lee100% (4)
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- Intel Processor Power Delivery DesignDocument13 pagesIntel Processor Power Delivery DesignE.I.OSENo ratings yet
- Heartbeat Monitor Using AT89C51Document5 pagesHeartbeat Monitor Using AT89C51Nalini Radhakrishnan0% (1)
- Chauvenet CriterionDocument2 pagesChauvenet CriterionBhavesh ChauhanNo ratings yet
- A Review of Low Power Processor DesignDocument10 pagesA Review of Low Power Processor DesignNalini RadhakrishnanNo ratings yet
- Design Stratigies of Low Power Voltage Level Shifter Circuits For Multi Supply SystemsDocument6 pagesDesign Stratigies of Low Power Voltage Level Shifter Circuits For Multi Supply SystemsIRJMETS JOURNALNo ratings yet
- Design of A Novel Energy Efficient Double Tail Dynamic ComparatorDocument5 pagesDesign of A Novel Energy Efficient Double Tail Dynamic ComparatorerpublicationNo ratings yet
- Analysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorDocument10 pagesAnalysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorKiran KNo ratings yet
- Low Power Vlsi Design: Assignment-1 G Abhishek Kumar Reddy, M Manoj VarmaDocument17 pagesLow Power Vlsi Design: Assignment-1 G Abhishek Kumar Reddy, M Manoj VarmamanojNo ratings yet
- Wei - Links - Chapter02 Energy-Efficient Design of High-Speed LinksDocument39 pagesWei - Links - Chapter02 Energy-Efficient Design of High-Speed LinksDaniel WeinfeldNo ratings yet
- Sources of Energy Consumption.Document12 pagesSources of Energy Consumption.misganawgetahunNo ratings yet
- Design of Low Power and High Speed Components of SAR ADCDocument6 pagesDesign of Low Power and High Speed Components of SAR ADCSuraj Kumar PrustyNo ratings yet
- DSP Based Control of Interleaved Boost ConverterDocument11 pagesDSP Based Control of Interleaved Boost ConverterDany ApablazaNo ratings yet
- Rends and Challenges in Vlsi: BY: Bhanuteja LabishettyDocument35 pagesRends and Challenges in Vlsi: BY: Bhanuteja LabishettyVarun ChauhanNo ratings yet
- Review Article: Device and Circuit Design Challenges in The Digital Subthreshold Region For Ultralow-Power ApplicationsDocument16 pagesReview Article: Device and Circuit Design Challenges in The Digital Subthreshold Region For Ultralow-Power ApplicationsFemin VargheseNo ratings yet
- DC DC Converter Master ThesisDocument5 pagesDC DC Converter Master Thesisgjd6bfa4100% (1)
- Analysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorDocument10 pagesAnalysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorSrinivasAnchalaNo ratings yet
- Power Management and Delivery For High-Performance MicroprocessorsDocument4 pagesPower Management and Delivery For High-Performance Microprocessorsrizal iskandarNo ratings yet
- Low Power CAD: Trends and ChallengesDocument24 pagesLow Power CAD: Trends and Challengesjubincb2No ratings yet
- Power Optimization For Low Power VLSI CircuitsDocument4 pagesPower Optimization For Low Power VLSI CircuitsCHARANNo ratings yet
- TP LeakagePowerOptimizationFlowDocument11 pagesTP LeakagePowerOptimizationFlowSathyanarayana RaoNo ratings yet
- Eui Seong 2008Document13 pagesEui Seong 2008Armin AhmadzadehNo ratings yet
- Overcoming The Power Wall: Connecting Voltage Domains in SeriesDocument6 pagesOvercoming The Power Wall: Connecting Voltage Domains in SeriesDipanjan DasNo ratings yet
- Design and Analysis of Different Circuits Using DCVSL & Static CMOS TechniqueDocument7 pagesDesign and Analysis of Different Circuits Using DCVSL & Static CMOS TechniqueGRD JournalsNo ratings yet
- Low Power ThesisDocument6 pagesLow Power Thesistiffanybarbermobile100% (2)
- Mixed-Signal IP Design Challenges in 28 NM and BeyondDocument14 pagesMixed-Signal IP Design Challenges in 28 NM and BeyondyvarshneyNo ratings yet
- Low Power VLSI Design Methodologies & Power ManagementDocument4 pagesLow Power VLSI Design Methodologies & Power ManagementGeetha Rani NNo ratings yet
- DC-DC Converter PHD ThesisDocument6 pagesDC-DC Converter PHD Thesisericaspiveyjackson100% (1)
- International Journal of Engineering Research and DevelopmentDocument8 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- Low-Power Digital VLSI DesignDocument530 pagesLow-Power Digital VLSI DesignAllanki Sanyasi Rao50% (2)
- Don Bosco Institute of Technology: Department of Electronics and Communication EngineeringDocument23 pagesDon Bosco Institute of Technology: Department of Electronics and Communication EngineeringSeema Shekarappa ChittakkiNo ratings yet
- An Analysis and Design of High Performance Power Consumption Double Tail Comparator Using Gated Clock and Power Gating TechniquesDocument7 pagesAn Analysis and Design of High Performance Power Consumption Double Tail Comparator Using Gated Clock and Power Gating TechniquesIJIRSTNo ratings yet
- Use Analog For Better Performance-To-Power RatiosDocument4 pagesUse Analog For Better Performance-To-Power RatiosAdyPajuraNo ratings yet
- Adiabatic Implementation On Full Adder Circuits: R.Swapna, Shoban MudeDocument5 pagesAdiabatic Implementation On Full Adder Circuits: R.Swapna, Shoban MudeshrivathsavsNo ratings yet
- Dynamic Power Reduction WPDocument6 pagesDynamic Power Reduction WPRanganadh MvNo ratings yet
- Approaches To Design & Implement High Speed-Low Power Digital Filter: ReviewDocument15 pagesApproaches To Design & Implement High Speed-Low Power Digital Filter: ReviewOmran RashNo ratings yet
- Power Management in Sensor Networks: Vijay Bhuse CS, WmuDocument31 pagesPower Management in Sensor Networks: Vijay Bhuse CS, WmuchryNo ratings yet
- Ijaerv12n2 02Document6 pagesIjaerv12n2 02Hardik MakwanaNo ratings yet
- Low Power Techniques For VLSI DesignDocument6 pagesLow Power Techniques For VLSI DesignjainatinNo ratings yet
- Double Tail Dynamic CompDocument10 pagesDouble Tail Dynamic CompBhura AnushaNo ratings yet
- Switched-Capacitor Boost-Buck Ladder Converters With Extended Voltage Range in Standard CMOSDocument14 pagesSwitched-Capacitor Boost-Buck Ladder Converters With Extended Voltage Range in Standard CMOSADITYA SHARMANo ratings yet
- Fault Current Contribution From Synchronous Machine and Inverter Based DGDocument8 pagesFault Current Contribution From Synchronous Machine and Inverter Based DGabs1989No ratings yet
- Design Technologies For Low Power VLSI: To Appear in Encyclopedia of Computer Science and Technology, 1995Document32 pagesDesign Technologies For Low Power VLSI: To Appear in Encyclopedia of Computer Science and Technology, 1995naveen silveriNo ratings yet
- Design Technologies For Low Power VLSI: To Appear in Encyclopedia of Computer Science and Technology, 1995Document32 pagesDesign Technologies For Low Power VLSI: To Appear in Encyclopedia of Computer Science and Technology, 1995Prabakaran EllaiyappanNo ratings yet
- Factors Causing Power Consumption in An Embedded Processor - A StudyDocument7 pagesFactors Causing Power Consumption in An Embedded Processor - A StudyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 0710ijcnc04 PDFDocument10 pages0710ijcnc04 PDFJam 234No ratings yet
- Column Bypassing Multiplier Implementation On FPGADocument17 pagesColumn Bypassing Multiplier Implementation On FPGAIJRASETPublicationsNo ratings yet
- Reliability Prediction For Low Power Adiabatic Logic FamiliesDocument6 pagesReliability Prediction For Low Power Adiabatic Logic FamilieshakikNo ratings yet
- Low Power Design MethodologyDocument3 pagesLow Power Design Methodologychiranjeevi muppalaNo ratings yet
- Time Base CircuitDocument12 pagesTime Base Circuitkaran007_mNo ratings yet
- ME Notes Unit 4 Part 3 Low Power IC and RFICsDocument5 pagesME Notes Unit 4 Part 3 Low Power IC and RFICssayan.transcuratorsNo ratings yet
- Durraiz Fyp ProposalDocument3 pagesDurraiz Fyp Proposaldurraiz shuaibNo ratings yet
- ×32 Bit Multiprecision Razor-Based Dynamic: 32 Bit Voltage Scaling Multiplier With Operands SchedulerDocument12 pages×32 Bit Multiprecision Razor-Based Dynamic: 32 Bit Voltage Scaling Multiplier With Operands SchedulerSenthilkumar KrishnamoorthyNo ratings yet
- LP MainDocument10 pagesLP MainAnonymous A6i1RJNo ratings yet
- Low Power Vlsi ThesisDocument5 pagesLow Power Vlsi Thesismariapadillaomaha100% (2)
- A Review: High Speed Low Power Flash ADC: Rahul D. Marotkar, Dr. Manoj S. NagmodeDocument4 pagesA Review: High Speed Low Power Flash ADC: Rahul D. Marotkar, Dr. Manoj S. NagmodeSunil PandeyNo ratings yet
- Mini2, 8th BatchDocument37 pagesMini2, 8th BatchdevaharshinisathaNo ratings yet
- Low Power Vlsi Design1Document23 pagesLow Power Vlsi Design1Shruthi GourishettiNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Highly Integrated Gate Drivers for Si and GaN Power TransistorsFrom EverandHighly Integrated Gate Drivers for Si and GaN Power TransistorsNo ratings yet
- EDC Questions With AnswersDocument80 pagesEDC Questions With AnswersNalini RadhakrishnanNo ratings yet
- April 2014Document1 pageApril 2014Nalini RadhakrishnanNo ratings yet
- Department of Electrical and Electronics EngineeringDocument4 pagesDepartment of Electrical and Electronics EngineeringNalini RadhakrishnanNo ratings yet
- A Review of Low Power Processor DesignDocument10 pagesA Review of Low Power Processor DesignNalini RadhakrishnanNo ratings yet
- Lg-monoblock-TERMAV-instalation ManualDocument263 pagesLg-monoblock-TERMAV-instalation ManualJernej SevšekNo ratings yet
- Edmo Dma200Document2 pagesEdmo Dma200anasamierNo ratings yet
- Chapter 9 Unpacking of Curriculum StandardsDocument6 pagesChapter 9 Unpacking of Curriculum StandardsGirlie DollenteNo ratings yet
- Comparison of Bond Strength Between A Conventional Resin Adhesive and A Resin-Modified Glass Ionomer Adhesive: An in Vitro and in Vivo Study.Document2 pagesComparison of Bond Strength Between A Conventional Resin Adhesive and A Resin-Modified Glass Ionomer Adhesive: An in Vitro and in Vivo Study.Reliance Orthodontic ProductsNo ratings yet
- STAT 330 Extra Problems - Chapters 1 To 5Document6 pagesSTAT 330 Extra Problems - Chapters 1 To 5Matt WangNo ratings yet
- Prediction of Swell Pressure of Black Cotton Soil North-East Nigeria - Pr12.142alrDocument9 pagesPrediction of Swell Pressure of Black Cotton Soil North-East Nigeria - Pr12.142alrSen HuNo ratings yet
- JEE Main 2023 Answer Key 30 Jan Shift 1Document34 pagesJEE Main 2023 Answer Key 30 Jan Shift 1Anne BrokeNo ratings yet
- Petersham Road Noise and Vibration SummaryDocument1 pagePetersham Road Noise and Vibration SummaryOnir XavierNo ratings yet
- Sbi4u Molecgenetics lp2Document3 pagesSbi4u Molecgenetics lp2api-344568500No ratings yet
- Ex Rtos CCSCDocument9 pagesEx Rtos CCSCWelat YakubNo ratings yet
- Research and TheoryDocument6 pagesResearch and TheoryWahengbam Rorrkychand100% (1)
- Math7 q2 - Module 3Document12 pagesMath7 q2 - Module 3Rou Gee100% (1)
- 4a.plant LayoutDocument31 pages4a.plant LayoutSagar PhullNo ratings yet
- Word EssayDocument2 pagesWord EssayKathrina Doroneo (rina)No ratings yet
- Baby Lock BLE3ATW Sewing Machine Service ManualDocument18 pagesBaby Lock BLE3ATW Sewing Machine Service ManualiliiexpugnansNo ratings yet
- Daftar PustakaDocument5 pagesDaftar PustakaAries AndriantoNo ratings yet
- Benefits of Shabad Guru - 3HO FoundationDocument5 pagesBenefits of Shabad Guru - 3HO FoundationBorisNo ratings yet
- Armored Toyota HiluxDocument1 pageArmored Toyota HiluxDinesh NadarajahNo ratings yet
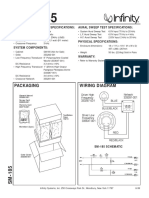
- Infinity sm-185Document2 pagesInfinity sm-185Bmwmotorsport GabriNo ratings yet
- An Action Research ProposalDocument21 pagesAn Action Research ProposalRICHEL MANGMANGNo ratings yet
- EY Re Engineering The Supply Chain For The Omni Channel of Tomorrow PDFDocument39 pagesEY Re Engineering The Supply Chain For The Omni Channel of Tomorrow PDFjunaid madniNo ratings yet
- 3 Finals-Lesson-1-For-Euthenics-Man-As-A-Social-BeingDocument14 pages3 Finals-Lesson-1-For-Euthenics-Man-As-A-Social-BeingAngela Danielle TanNo ratings yet
- Slawinski Et Al. - 2010 - Kinematic and Kinetic Comparisons of Elite and Well-Trained Sprinters During Sprint StartDocument10 pagesSlawinski Et Al. - 2010 - Kinematic and Kinetic Comparisons of Elite and Well-Trained Sprinters During Sprint StartAhmad MustaqimNo ratings yet
- Storage VesselsDocument66 pagesStorage VesselsShivam JagtapNo ratings yet
- Bullying Questionnaire For StudentsDocument4 pagesBullying Questionnaire For StudentsMunid AhmadNo ratings yet
- KVS Class 8 PT1 Exam Maths Question Paper 2018 by KV SitapurDocument2 pagesKVS Class 8 PT1 Exam Maths Question Paper 2018 by KV Sitapuredge pcNo ratings yet