Download as pdf or txt
You might also like
- Macadam1942 - Visual Sensitive To Color Diferences in DaylightDocument28 pagesMacadam1942 - Visual Sensitive To Color Diferences in DaylightPeter AJ GRNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Environmental Chemistry of Soils PDFDocument411 pagesEnvironmental Chemistry of Soils PDFSamara Alves100% (1)
- Analysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingDocument4 pagesAnalysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingmohammadNo ratings yet
- Très Important - Dimensionnement D2LDocument8 pagesTrès Important - Dimensionnement D2LSafaAffiNo ratings yet
- MEC-Based Modelling of Claw Pole Machines ApplicatDocument9 pagesMEC-Based Modelling of Claw Pole Machines ApplicatBOUZ2010No ratings yet
- Design of A 1kW High Speed Axial Flux PeDocument9 pagesDesign of A 1kW High Speed Axial Flux PemanasrinuNo ratings yet
- A Study of The Design For The Flux Reversal Machine 221201 011547Document4 pagesA Study of The Design For The Flux Reversal Machine 221201 011547Rana AtharNo ratings yet
- IEEE-TOM - Journal ArticleDocument4 pagesIEEE-TOM - Journal ArticleedumacerenNo ratings yet
- Ref 9 PDFDocument10 pagesRef 9 PDFAli H. NumanNo ratings yet
- A Winding-Switching Concept For Flux Weakening in Consequent Magnet Pole Switched Flux Memory MachineDocument4 pagesA Winding-Switching Concept For Flux Weakening in Consequent Magnet Pole Switched Flux Memory MachineNoman NisarNo ratings yet
- Icelmach 2008 4800163Document4 pagesIcelmach 2008 4800163nevesunipampaNo ratings yet
- 22 Transient Analysis of A Magnetic Gear Integrated BrushlesDocument5 pages22 Transient Analysis of A Magnetic Gear Integrated BrushlesnevesunipampaNo ratings yet
- Ho2010 Result of RotorDocument4 pagesHo2010 Result of RotorIraqi stormNo ratings yet
- Practical Induction 01Document5 pagesPractical Induction 01sathishNo ratings yet
- Optimal Scheme For Structural Design of Large Turbogenerator Stator End WindingDocument10 pagesOptimal Scheme For Structural Design of Large Turbogenerator Stator End WindingmanojkumarNo ratings yet
- 32 Neves Coaxial MagneticDocument8 pages32 Neves Coaxial MagneticbnbaNo ratings yet
- Analytical Approach To Cogging Torque Calculation of PM Brushless MotorsDocument7 pagesAnalytical Approach To Cogging Torque Calculation of PM Brushless Motorsjae hak kimNo ratings yet
- Optimal Design and Control of Axial-Flux Brushless DC Wheel Motor For Electrical VehiclesDocument10 pagesOptimal Design and Control of Axial-Flux Brushless DC Wheel Motor For Electrical Vehiclesfre12345No ratings yet
- Design and Comparative Performance Analysis of Inner Rotor and Inner Stator Axial Flux Permanent Magnet Synchronous Generator For Wind Turbine ApplicationsDocument7 pagesDesign and Comparative Performance Analysis of Inner Rotor and Inner Stator Axial Flux Permanent Magnet Synchronous Generator For Wind Turbine ApplicationsfilimonNo ratings yet
- Study of A Hybrid Excitation Synchronous MachineDocument21 pagesStudy of A Hybrid Excitation Synchronous MachineHamza AliNo ratings yet
- Analytical Model For Permanent Magnet Motors With Surface Mounted MagnetsDocument6 pagesAnalytical Model For Permanent Magnet Motors With Surface Mounted MagnetsIndra PrakashNo ratings yet
- DC Analitic SystemDocument6 pagesDC Analitic SystemDobai SzilardNo ratings yet
- Permanent Magnet Bias, Homopolar Magnetic Bearings For A 130 KW-HR Composite FlywheelDocument8 pagesPermanent Magnet Bias, Homopolar Magnetic Bearings For A 130 KW-HR Composite FlywheelAnonymous f3oWRCJNo ratings yet
- Design and Analysis of A Novel Brushless Wound Rotor Synchronous MachineDocument4 pagesDesign and Analysis of A Novel Brushless Wound Rotor Synchronous MachineHuong ThaoNo ratings yet
- Improved Analytical Model For Predicting The Magnetic Field Distribution in Brushless Permanent-Magnet MachinesDocument10 pagesImproved Analytical Model For Predicting The Magnetic Field Distribution in Brushless Permanent-Magnet MachinesmitulNo ratings yet
- Research Article: A Permanent Magnet Generator For Energy Conversion From Marine Currents: No Load and Load ExperimentsDocument8 pagesResearch Article: A Permanent Magnet Generator For Energy Conversion From Marine Currents: No Load and Load ExperimentsJohn Paul BaquiranNo ratings yet
- Free Energy 2Document7 pagesFree Energy 2Fadi BarakeNo ratings yet
- A Novel Dual-Rotor, Axial Field, Fault-Tolerant Flux-Switching Permanent Magnet Machine With High-Torque PerformanceDocument4 pagesA Novel Dual-Rotor, Axial Field, Fault-Tolerant Flux-Switching Permanent Magnet Machine With High-Torque Performancejunaid ikramNo ratings yet
- 492 FerreiraDocument6 pages492 FerreiraRonald LiemNo ratings yet
- Wrobel2003 Article ANewApproachToReductionOfTheCoDocument11 pagesWrobel2003 Article ANewApproachToReductionOfTheCoJohn XaviNo ratings yet
- Revue Tananariviene Global StreetDocument10 pagesRevue Tananariviene Global StreetermanjatoNo ratings yet
- Design and Analysis of Moving Magnet Synchronous Surface Motor With Linear Halbach ArrayDocument11 pagesDesign and Analysis of Moving Magnet Synchronous Surface Motor With Linear Halbach ArraysubruaNo ratings yet
- ROTOR StrikingDocument3 pagesROTOR StrikingDearRed FrankNo ratings yet
- 10 1 1 1034 5168 PDFDocument6 pages10 1 1 1034 5168 PDFRosa Elvira Montalvo MartínezNo ratings yet
- Wevj 05 00533Document8 pagesWevj 05 00533Ashutosh SahuNo ratings yet
- 04 Wheel Axial Flux SRM Drive Light Electric VehiclesDocument8 pages04 Wheel Axial Flux SRM Drive Light Electric VehiclesSek PyroNo ratings yet
- Electromagnetic Torque Capabilities of Axial-Flux and Radial-Flux Permanent-Magnet MachinesDocument4 pagesElectromagnetic Torque Capabilities of Axial-Flux and Radial-Flux Permanent-Magnet MachinessosiNo ratings yet
- Design of Four-Pole Permanent Magnet Motor With Different Rotor Topologies.Document7 pagesDesign of Four-Pole Permanent Magnet Motor With Different Rotor Topologies.kalyanNo ratings yet
- Modeling of A Tubular Permanent Magnet Linear Generator For Wave Energy Conversion Using Finite Element MethodDocument5 pagesModeling of A Tubular Permanent Magnet Linear Generator For Wave Energy Conversion Using Finite Element MethodsyazanaNo ratings yet
- Iet-Epa 2020 0126Document6 pagesIet-Epa 2020 0126Mehdi AminiNo ratings yet
- Analysis and Design Optimization of An Improved AxDocument9 pagesAnalysis and Design Optimization of An Improved AxSubrat DasNo ratings yet
- Design of Internal Permanent Magnet Brushless DC Motor Using AnsysDocument7 pagesDesign of Internal Permanent Magnet Brushless DC Motor Using Ansysviet anh nguyenNo ratings yet
- Design of A Miniature Axial-Flux Spindle Motor With Rhomboidal PCB WindingDocument3 pagesDesign of A Miniature Axial-Flux Spindle Motor With Rhomboidal PCB WindingnevesunipampaNo ratings yet
- Analysis of Axial Flux MotorDocument4 pagesAnalysis of Axial Flux MotorAvi GuptaNo ratings yet
- Pulsating Torque Minimization Techniques For Permanent Magnet AC Motor Drives - A ReviewDocument10 pagesPulsating Torque Minimization Techniques For Permanent Magnet AC Motor Drives - A ReviewIan SilveiraNo ratings yet
- Finite-Element Models For Electrical Machines by HennebergerDocument12 pagesFinite-Element Models For Electrical Machines by HennebergermuhassadiNo ratings yet
- Design of Damper To Protect The Field Coil of An HTS Synchronous MotorDocument4 pagesDesign of Damper To Protect The Field Coil of An HTS Synchronous Motorgurunathan14No ratings yet
- Rare-Earth Free Motor With Field Poles Excited by Space HarmonicsDocument6 pagesRare-Earth Free Motor With Field Poles Excited by Space HarmonicsHuong ThaoNo ratings yet
- Modeling of Space Harmonic Interactions in Axial Flux Permanent Magnet GeneratorsDocument16 pagesModeling of Space Harmonic Interactions in Axial Flux Permanent Magnet GeneratorsM2A AutotrônicaNo ratings yet
- Oscillatory Synchronous Linear Motor With Permanent-Magnet ExcitationDocument5 pagesOscillatory Synchronous Linear Motor With Permanent-Magnet ExcitationJon JonNo ratings yet
- Analysis and Calculation of The Electromagnetic Field in Permanent Magnet Synchronous Motor Based On ANSYSDocument4 pagesAnalysis and Calculation of The Electromagnetic Field in Permanent Magnet Synchronous Motor Based On ANSYSSuman SahaNo ratings yet
- High-Bandwidth Current Control For Torque-Ripple Compensation in PM Synchronous MachinesDocument9 pagesHigh-Bandwidth Current Control For Torque-Ripple Compensation in PM Synchronous Machinesye001991gNo ratings yet
- Analysis of A Novel Magnetic-Hydrodynamic Double Levitated Motor For An Implantable Axial Flow Blood Pump PDFDocument15 pagesAnalysis of A Novel Magnetic-Hydrodynamic Double Levitated Motor For An Implantable Axial Flow Blood Pump PDFVu MinhNo ratings yet
- 12 Tie 0965 R2Document12 pages12 Tie 0965 R2ZahraaRaz 1996No ratings yet
- Effect of Radial Magnetic Forces in Permanent Magnetic Motors With Rotor EccentricityDocument3 pagesEffect of Radial Magnetic Forces in Permanent Magnetic Motors With Rotor EccentricitylNo ratings yet
- JOAPE - Volume 2 - Issue 2 - Pages 121-128Document8 pagesJOAPE - Volume 2 - Issue 2 - Pages 121-128uma.bhuvanNo ratings yet
- A Methos For Dynamic Simulation and Detection of Dynamic Air-Gap Eccentricity in Synchronous MachinesDocument3 pagesA Methos For Dynamic Simulation and Detection of Dynamic Air-Gap Eccentricity in Synchronous Machinesafru2000No ratings yet
- Spintronics for Next Generation Innovative DevicesFrom EverandSpintronics for Next Generation Innovative DevicesKatsuaki SatoNo ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Foundations of Electromagnetic Compatibility: with Practical ApplicationsFrom EverandFoundations of Electromagnetic Compatibility: with Practical ApplicationsNo ratings yet
- Electrical Resin 260: ScotchcastDocument2 pagesElectrical Resin 260: Scotchcastreddy venkata krishnaNo ratings yet
- Thesis FinalDocument123 pagesThesis Finalreddy venkata krishnaNo ratings yet
- Analysis and Evaluation of Electromagnetic Vibration and Noise in Permanent Magnet Synchronous Motor With Rotor Step SkewingDocument11 pagesAnalysis and Evaluation of Electromagnetic Vibration and Noise in Permanent Magnet Synchronous Motor With Rotor Step Skewingreddy venkata krishnaNo ratings yet
- NVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor SlottingDocument16 pagesNVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor Slottingreddy venkata krishnaNo ratings yet
- Demagnetization Studies On Permanent Magnets - : Stefan SjökvistDocument43 pagesDemagnetization Studies On Permanent Magnets - : Stefan Sjökvistreddy venkata krishnaNo ratings yet
- A Comparison Between Maximum Torque/Ampere and Maximum Efficiency Control Strategies in IPM Synchronous MachinesDocument8 pagesA Comparison Between Maximum Torque/Ampere and Maximum Efficiency Control Strategies in IPM Synchronous Machinesreddy venkata krishnaNo ratings yet
- Ki Chankim2009Document4 pagesKi Chankim2009reddy venkata krishnaNo ratings yet
- Magnetically Coupled Resonant Wireless Power Transmission Systems With Relay ElementsDocument4 pagesMagnetically Coupled Resonant Wireless Power Transmission Systems With Relay Elementsreddy venkata krishnaNo ratings yet
- IUST v14n1p22 enDocument6 pagesIUST v14n1p22 enreddy venkata krishnaNo ratings yet
- Boundary Layer TheoryDocument76 pagesBoundary Layer Theorysahel mamlekat doustNo ratings yet
- t3 Free PlansDocument46 pagest3 Free PlansDan100% (1)
- Iommwscwdc 3 Rev10 04Document46 pagesIommwscwdc 3 Rev10 04陳禮鈞No ratings yet
- s21 059Document7 pagess21 059Игорь БоровикNo ratings yet
- Midas Manual PDFDocument49 pagesMidas Manual PDFNishad Kulkarni100% (1)
- CE 34 Lab ManualDocument25 pagesCE 34 Lab ManualWeldie SalinoNo ratings yet
- Chapter 4 - Determination of Particle Size of Soils - Astm D422-63 (1990)Document10 pagesChapter 4 - Determination of Particle Size of Soils - Astm D422-63 (1990)Yena Cabalu100% (1)
- Computer Graphics BCA Iii Sem Multiple Choice Questions: Ans: Picture ElementDocument20 pagesComputer Graphics BCA Iii Sem Multiple Choice Questions: Ans: Picture ElementRoel PalmairaNo ratings yet
- Clams: Current SettingDocument10 pagesClams: Current SettingElham Jaraine Garcia LptNo ratings yet
- Merkaba Developing Your Personal Light BodyDocument7 pagesMerkaba Developing Your Personal Light BodyPilar100% (1)
- 5 Limit-Fit-ToleranceDocument45 pages5 Limit-Fit-ToleranceJeeva P ANo ratings yet
- ExpoPEP-Crop CirclesDocument31 pagesExpoPEP-Crop CirclesElizabeth OsorioNo ratings yet
- Iit Jee: Yoddha Batch For JEE Main and Advanced 2024Document9 pagesIit Jee: Yoddha Batch For JEE Main and Advanced 2024Shreyas PatelNo ratings yet
- LF 251-1100 - D300483Document2 pagesLF 251-1100 - D300483Anshuman AgrawalNo ratings yet
- 1 Assignment Rolling Contact BearingDocument1 page1 Assignment Rolling Contact BearingNirav100% (1)
- Cambridge Pre-U Certificate: Cambridge Assessment International EducationDocument8 pagesCambridge Pre-U Certificate: Cambridge Assessment International EducationAlfred JacobNo ratings yet
- Cathodic Protection Module 1-00Document24 pagesCathodic Protection Module 1-00razoumihineNo ratings yet
- 545587Document8 pages545587RakipBelishakuJr.No ratings yet
- Butt Welds: Ivanoff Assumes 90%Document9 pagesButt Welds: Ivanoff Assumes 90%BTENo ratings yet
- Coulombs Law - MagnetismDocument5 pagesCoulombs Law - MagnetismYugandhar Veeramachaneni100% (5)
- Statistical Description of The Wave Front Aberration in The Human EyeDocument13 pagesStatistical Description of The Wave Front Aberration in The Human EyeDaniel TopaNo ratings yet
- Hydaulic MiningDocument9 pagesHydaulic MiningSatya Prakash SuryavanshiNo ratings yet
- Hydraulics: Mr. Abdou Idris OmarDocument10 pagesHydraulics: Mr. Abdou Idris OmarAbdirahman HousseinNo ratings yet
- Equipment Costing SizingDocument108 pagesEquipment Costing Sizingjk100% (1)
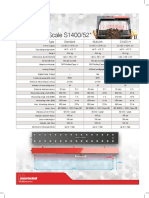
- Sensortechnik Optical Belt Scale Tech Sheet S1400 FinalDocument1 pageSensortechnik Optical Belt Scale Tech Sheet S1400 FinalyogaNo ratings yet
- Position Analysis Lecture Note (Theory of Machines)Document2 pagesPosition Analysis Lecture Note (Theory of Machines)AhmedNo ratings yet
- Kami Export - ADRIAN MAHASE - Form 3-3 Reflection Q 4 (7 Only)Document1 pageKami Export - ADRIAN MAHASE - Form 3-3 Reflection Q 4 (7 Only)ADRIAN MAHASENo ratings yet
- Parcijalniizvodi 3Document5 pagesParcijalniizvodi 3alice boaNo ratings yet