
MTS2A1 Komputer & Simulasi: Bagian I - Aljabar Matrix
MTS2A1 Komputer & Simulasi: Bagian I - Aljabar Matrix
You might also like
- Laplace TableDocument2 pagesLaplace TableNguyen Tran100% (1)
- MatricesDocument52 pagesMatriceskavindakarunarathne1999No ratings yet
- ME555 Lecture 2Document58 pagesME555 Lecture 2陆强No ratings yet
- 2.6 Matrices: Matrix EqualityDocument4 pages2.6 Matrices: Matrix Equalityالزهور لخدمات الانترنيتNo ratings yet
- Exercices de Math Ematiques: Matrix CalculusDocument8 pagesExercices de Math Ematiques: Matrix Calculusنور هدىNo ratings yet
- 10 Strassens Matrix MultiplicationDocument25 pages10 Strassens Matrix Multiplicationthe477577No ratings yet
- MIT18 02SC MNotes m1 PDFDocument4 pagesMIT18 02SC MNotes m1 PDFNABIL HUSSAINNo ratings yet
- Basic Operations On Matrices: Ij MXN Ij MXNDocument61 pagesBasic Operations On Matrices: Ij MXN Ij MXNsmmounesh1605No ratings yet
- Lect 1-2Document45 pagesLect 1-2Tyrion LannisterNo ratings yet
- 4038CEM Engineering Mathematics I 4010CEM Mathematics For Physics and EngineeringDocument20 pages4038CEM Engineering Mathematics I 4010CEM Mathematics For Physics and EngineeringMicah TamunoNo ratings yet
- Products of MatricesDocument4 pagesProducts of MatricesSaikh Shahjahan MiahNo ratings yet
- Pertemuan - 2: Operasi MatriksDocument14 pagesPertemuan - 2: Operasi Matrikswww_ikhsan_nulkhairNo ratings yet
- Lecture 2 of 11 (Chap 5, Matrices)Document37 pagesLecture 2 of 11 (Chap 5, Matrices)ABC_Ais Batu CampurNo ratings yet
- Rezolvare Algenra LiniaraDocument15 pagesRezolvare Algenra LiniaraVlad AnghelNo ratings yet
- Chapter 2. Matrix AlgebraDocument77 pagesChapter 2. Matrix AlgebraJoke ChanNo ratings yet
- Amc8 V4Document168 pagesAmc8 V4Shuai ChenNo ratings yet
- ProblemsDocument5 pagesProblemsAhasan RidoyNo ratings yet
- Kunci Soal Pusat Penilaian Pendidikan Usbn 20. Dinas Pendidikan Provinsi Sulawesi Tenggara UtamaDocument4 pagesKunci Soal Pusat Penilaian Pendidikan Usbn 20. Dinas Pendidikan Provinsi Sulawesi Tenggara UtamaAzmin Mini IsaNo ratings yet
- SPM Notes & Formulae MathematicsDocument9 pagesSPM Notes & Formulae MathematicsPatrick PhuahNo ratings yet
- CHEG 342 Solutions ManualDocument213 pagesCHEG 342 Solutions ManualChaitanya SheopurkarNo ratings yet
- Matrices and Determinants Topic 3: Aa A Aa A A A Aa ADocument9 pagesMatrices and Determinants Topic 3: Aa A Aa A A A Aa ASyed Abdul Mussaver ShahNo ratings yet
- Linear Algebra Final Exam - SampleDocument7 pagesLinear Algebra Final Exam - Sample郭之一No ratings yet
- 9 Matrices and Transformations: ObjectivesDocument38 pages9 Matrices and Transformations: ObjectivesMasimba MhangamiNo ratings yet
- Lecture 3Document10 pagesLecture 3Charitha Prasad LiyanagamaNo ratings yet
- Block MatricesDocument6 pagesBlock Matricessoumak nagNo ratings yet
- Determinants PDFDocument5 pagesDeterminants PDFDebashish PalNo ratings yet
- (Specialist) 2011 TSSM Exam 2 SolutionsDocument17 pages(Specialist) 2011 TSSM Exam 2 SolutionsKelleyNo ratings yet
- MatricesDocument8 pagesMatricesMoses SikaongaNo ratings yet
- Definitions of MatrixDocument7 pagesDefinitions of MatrixneophymenNo ratings yet
- Notes and Formulae MathematicsDocument9 pagesNotes and Formulae MathematicsNurAinKhalidNo ratings yet
- Electric and Magnetic Fields Answers To Week 1 AssignmentDocument3 pagesElectric and Magnetic Fields Answers To Week 1 AssignmentShootingStarPhotonsNo ratings yet
- 3RD Term S2 MathematicsDocument31 pages3RD Term S2 MathematicsAdelowo DanielNo ratings yet
- Discrete MathematicsDocument22 pagesDiscrete MathematicsSagar WattsNo ratings yet
- PMO National 2018 For IMO PDFDocument8 pagesPMO National 2018 For IMO PDFCedrixe MadridNo ratings yet
- Discrete Structure Chapter 3 Mathematical Induction-68Document70 pagesDiscrete Structure Chapter 3 Mathematical Induction-68rockers910% (1)
- Workshop6 SolutionsDocument3 pagesWorkshop6 SolutionsforspamreceivalNo ratings yet
- KV N JNVDocument4 pagesKV N JNVasb1922010No ratings yet
- Matrix AlgebraDocument47 pagesMatrix Algebramandeep kaurNo ratings yet
- Apdx03Document5 pagesApdx03Ayman_Elmasry_9107No ratings yet
- Fpure ch9Document38 pagesFpure ch9Elvira Toktasinova100% (1)
- ws8 matrix algebraDocument4 pagesws8 matrix algebraAmrinNo ratings yet
- Engineering Mathematics IIIDocument17 pagesEngineering Mathematics IIIbethuyegoNo ratings yet
- Bab 1. MatrixDocument32 pagesBab 1. MatrixEdwin Wirgho100% (1)
- ME246 Fall 2016 Exam2 SolutionDocument5 pagesME246 Fall 2016 Exam2 SolutionJaneNo ratings yet
- Theory of Structures 2 Chapter 4.1 - Analysis of Frames: No SideswayDocument11 pagesTheory of Structures 2 Chapter 4.1 - Analysis of Frames: No SideswayBone SnowNo ratings yet
- 2012 Sun Life Financial Rep Echage Solutions: S S S S S SDocument12 pages2012 Sun Life Financial Rep Echage Solutions: S S S S S SCorneliaNo ratings yet
- Notes and Formulae SPM Mathematics Form 1 - 3 Notes Solid GeometryDocument9 pagesNotes and Formulae SPM Mathematics Form 1 - 3 Notes Solid GeometryJarnice Ling Yee ChingNo ratings yet
- Applications of Products of Vectors: Lecture No.6Document7 pagesApplications of Products of Vectors: Lecture No.6Mohamed Maher100% (1)
- Math 3Document68 pagesMath 3Phono CompNo ratings yet
- PlymouthUniversity MathsandStats Matrix MultiplicationDocument37 pagesPlymouthUniversity MathsandStats Matrix MultiplicationGood DeedsNo ratings yet
- Matrix Algebra: MotivationDocument12 pagesMatrix Algebra: MotivationSaumil ShahNo ratings yet
- Recurrence Relations: Mathematical Models, Analysis TechniquesDocument38 pagesRecurrence Relations: Mathematical Models, Analysis TechniquesMadeehah AatifNo ratings yet
- IGCSE Additional Mathematics 0606 - 11 Paper 1 May - Jun 2023Document11 pagesIGCSE Additional Mathematics 0606 - 11 Paper 1 May - Jun 2023shadybitxhespamNo ratings yet
- The Joy of Matrix MathsDocument5 pagesThe Joy of Matrix MathsBryanLaiNo ratings yet
- Chapter 10 Matrices and Determinants: AlgebraDocument15 pagesChapter 10 Matrices and Determinants: AlgebraDinesh KumarNo ratings yet
- Instructor'S Manual To Accompany Charles Kittel Introduction To Solid State PhysicsDocument62 pagesInstructor'S Manual To Accompany Charles Kittel Introduction To Solid State Physicsn4meNo ratings yet
- CBSE Class 10 Maths Paper SolutionDocument29 pagesCBSE Class 10 Maths Paper SolutionSantanuNo ratings yet
- Notes On Kronecker Products: 1 The Stack OperatorDocument4 pagesNotes On Kronecker Products: 1 The Stack Operatoraimal0% (1)
- Class X Maths (S) 23-24 Pre-Board SolDocument26 pagesClass X Maths (S) 23-24 Pre-Board Sol12345krish0guptaNo ratings yet
- Algoritma Divide and Conquer (2021) Bagian3Document37 pagesAlgoritma Divide and Conquer (2021) Bagian3Fatinul SNo ratings yet
- PSQT Imp QuestionsDocument2 pagesPSQT Imp QuestionsSai Santhosh100% (1)
- Introduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsDocument42 pagesIntroduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsFaryal BatoolNo ratings yet
- O Level AddMathsDocument15 pagesO Level AddMathsShaun GadzikwaNo ratings yet
- Midterm ProjectDocument15 pagesMidterm Projectkaren perrerasNo ratings yet
- 50 ItemsDocument6 pages50 ItemsRonald Punay IntinaNo ratings yet
- 2005level2 SolutionsDocument8 pages2005level2 SolutionsRaghav guptaNo ratings yet
- Numerical Solutions To CE Problems 1Document3 pagesNumerical Solutions To CE Problems 1aryastark1303No ratings yet
- Maths 1stDocument4 pagesMaths 1stguruchoudhary1012No ratings yet
- MTH 202Document209 pagesMTH 202ThuanNo ratings yet
- 2014 Preprint Tort 1 PDFDocument5 pages2014 Preprint Tort 1 PDFElaine MarrielNo ratings yet
- 4MA0 4HR Que 20140115Document24 pages4MA0 4HR Que 20140115Lalith77No ratings yet
- General Mathematics: Learning Activity Sheet Simple and General AnnuitiesDocument14 pagesGeneral Mathematics: Learning Activity Sheet Simple and General AnnuitiesMauro UbungenNo ratings yet
- Reveiwer Grade10Document20 pagesReveiwer Grade10Norman A ReyesNo ratings yet
- UNIT 2 Binomial TheoremDocument3 pagesUNIT 2 Binomial TheoremBilly Jasper DomingoNo ratings yet
- Ab Initio MethodsDocument52 pagesAb Initio MethodsLuis SosaNo ratings yet
- Mubashir Abbas: Personal InformationDocument3 pagesMubashir Abbas: Personal InformationRaja Muhammad NomanNo ratings yet
- Envelopes and Sharp Embeddings of Function Spaces PDFDocument25 pagesEnvelopes and Sharp Embeddings of Function Spaces PDFKala SthalaNo ratings yet
- An Improved Bilevel Evolutionary Algorithm Based On Quadratic ApproximationsDocument15 pagesAn Improved Bilevel Evolutionary Algorithm Based On Quadratic ApproximationsDilan SahinNo ratings yet
- CS490 Advanced Topics in Computing (Deep Learning)Document37 pagesCS490 Advanced Topics in Computing (Deep Learning)Afaq AhmedNo ratings yet
- MTH101 TutorialDocument2 pagesMTH101 TutorialOnochie EnunwaonyeNo ratings yet
- The Meaning of Einstein Field EquationsDocument8 pagesThe Meaning of Einstein Field EquationsShivank MehraNo ratings yet
- UEM Sol To Exerc Chap 096Document9 pagesUEM Sol To Exerc Chap 096sibieNo ratings yet
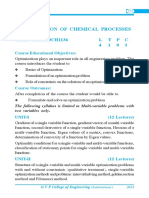
- Optimization of Chemical Processes: Course Code: 13CH1136 L TPC 4 1 0 3Document2 pagesOptimization of Chemical Processes: Course Code: 13CH1136 L TPC 4 1 0 3victorNo ratings yet
- Maths Guidelines For Board Exams PDFDocument11 pagesMaths Guidelines For Board Exams PDFheenaNo ratings yet
- How To Define and Solve Polynomials in Scilab: P (X) A X +a X +a X + +a XDocument3 pagesHow To Define and Solve Polynomials in Scilab: P (X) A X +a X +a X + +a XCharlyn FloresNo ratings yet
- Diffusion EquationDocument22 pagesDiffusion EquationTaterRayGumfriesNo ratings yet
- Traveling Salesman ProblemDocument11 pagesTraveling Salesman ProblemdeardestinyNo ratings yet
- Chapter 2 SOlucionario Ahuja .. Network FlowDocument7 pagesChapter 2 SOlucionario Ahuja .. Network FlowCarlos Alberto CuevasNo ratings yet
- MVT Indetermimate Sphere PDFDocument31 pagesMVT Indetermimate Sphere PDFSarthak SharmaNo ratings yet






















































































Download as pdf or txt
You might also like
- Laplace TableDocument2 pagesLaplace TableNguyen Tran100% (1)
- MatricesDocument52 pagesMatriceskavindakarunarathne1999No ratings yet
- ME555 Lecture 2Document58 pagesME555 Lecture 2陆强No ratings yet
- 2.6 Matrices: Matrix EqualityDocument4 pages2.6 Matrices: Matrix Equalityالزهور لخدمات الانترنيتNo ratings yet
- Exercices de Math Ematiques: Matrix CalculusDocument8 pagesExercices de Math Ematiques: Matrix Calculusنور هدىNo ratings yet
- 10 Strassens Matrix MultiplicationDocument25 pages10 Strassens Matrix Multiplicationthe477577No ratings yet
- MIT18 02SC MNotes m1 PDFDocument4 pagesMIT18 02SC MNotes m1 PDFNABIL HUSSAINNo ratings yet
- Basic Operations On Matrices: Ij MXN Ij MXNDocument61 pagesBasic Operations On Matrices: Ij MXN Ij MXNsmmounesh1605No ratings yet
- Lect 1-2Document45 pagesLect 1-2Tyrion LannisterNo ratings yet
- 4038CEM Engineering Mathematics I 4010CEM Mathematics For Physics and EngineeringDocument20 pages4038CEM Engineering Mathematics I 4010CEM Mathematics For Physics and EngineeringMicah TamunoNo ratings yet
- Products of MatricesDocument4 pagesProducts of MatricesSaikh Shahjahan MiahNo ratings yet
- Pertemuan - 2: Operasi MatriksDocument14 pagesPertemuan - 2: Operasi Matrikswww_ikhsan_nulkhairNo ratings yet
- Lecture 2 of 11 (Chap 5, Matrices)Document37 pagesLecture 2 of 11 (Chap 5, Matrices)ABC_Ais Batu CampurNo ratings yet
- Rezolvare Algenra LiniaraDocument15 pagesRezolvare Algenra LiniaraVlad AnghelNo ratings yet
- Chapter 2. Matrix AlgebraDocument77 pagesChapter 2. Matrix AlgebraJoke ChanNo ratings yet
- Amc8 V4Document168 pagesAmc8 V4Shuai ChenNo ratings yet
- ProblemsDocument5 pagesProblemsAhasan RidoyNo ratings yet
- Kunci Soal Pusat Penilaian Pendidikan Usbn 20. Dinas Pendidikan Provinsi Sulawesi Tenggara UtamaDocument4 pagesKunci Soal Pusat Penilaian Pendidikan Usbn 20. Dinas Pendidikan Provinsi Sulawesi Tenggara UtamaAzmin Mini IsaNo ratings yet
- SPM Notes & Formulae MathematicsDocument9 pagesSPM Notes & Formulae MathematicsPatrick PhuahNo ratings yet
- CHEG 342 Solutions ManualDocument213 pagesCHEG 342 Solutions ManualChaitanya SheopurkarNo ratings yet
- Matrices and Determinants Topic 3: Aa A Aa A A A Aa ADocument9 pagesMatrices and Determinants Topic 3: Aa A Aa A A A Aa ASyed Abdul Mussaver ShahNo ratings yet
- Linear Algebra Final Exam - SampleDocument7 pagesLinear Algebra Final Exam - Sample郭之一No ratings yet
- 9 Matrices and Transformations: ObjectivesDocument38 pages9 Matrices and Transformations: ObjectivesMasimba MhangamiNo ratings yet
- Lecture 3Document10 pagesLecture 3Charitha Prasad LiyanagamaNo ratings yet
- Block MatricesDocument6 pagesBlock Matricessoumak nagNo ratings yet
- Determinants PDFDocument5 pagesDeterminants PDFDebashish PalNo ratings yet
- (Specialist) 2011 TSSM Exam 2 SolutionsDocument17 pages(Specialist) 2011 TSSM Exam 2 SolutionsKelleyNo ratings yet
- MatricesDocument8 pagesMatricesMoses SikaongaNo ratings yet
- Definitions of MatrixDocument7 pagesDefinitions of MatrixneophymenNo ratings yet
- Notes and Formulae MathematicsDocument9 pagesNotes and Formulae MathematicsNurAinKhalidNo ratings yet
- Electric and Magnetic Fields Answers To Week 1 AssignmentDocument3 pagesElectric and Magnetic Fields Answers To Week 1 AssignmentShootingStarPhotonsNo ratings yet
- 3RD Term S2 MathematicsDocument31 pages3RD Term S2 MathematicsAdelowo DanielNo ratings yet
- Discrete MathematicsDocument22 pagesDiscrete MathematicsSagar WattsNo ratings yet
- PMO National 2018 For IMO PDFDocument8 pagesPMO National 2018 For IMO PDFCedrixe MadridNo ratings yet
- Discrete Structure Chapter 3 Mathematical Induction-68Document70 pagesDiscrete Structure Chapter 3 Mathematical Induction-68rockers910% (1)
- Workshop6 SolutionsDocument3 pagesWorkshop6 SolutionsforspamreceivalNo ratings yet
- KV N JNVDocument4 pagesKV N JNVasb1922010No ratings yet
- Matrix AlgebraDocument47 pagesMatrix Algebramandeep kaurNo ratings yet
- Apdx03Document5 pagesApdx03Ayman_Elmasry_9107No ratings yet
- Fpure ch9Document38 pagesFpure ch9Elvira Toktasinova100% (1)
- ws8 matrix algebraDocument4 pagesws8 matrix algebraAmrinNo ratings yet
- Engineering Mathematics IIIDocument17 pagesEngineering Mathematics IIIbethuyegoNo ratings yet
- Bab 1. MatrixDocument32 pagesBab 1. MatrixEdwin Wirgho100% (1)
- ME246 Fall 2016 Exam2 SolutionDocument5 pagesME246 Fall 2016 Exam2 SolutionJaneNo ratings yet
- Theory of Structures 2 Chapter 4.1 - Analysis of Frames: No SideswayDocument11 pagesTheory of Structures 2 Chapter 4.1 - Analysis of Frames: No SideswayBone SnowNo ratings yet
- 2012 Sun Life Financial Rep Echage Solutions: S S S S S SDocument12 pages2012 Sun Life Financial Rep Echage Solutions: S S S S S SCorneliaNo ratings yet
- Notes and Formulae SPM Mathematics Form 1 - 3 Notes Solid GeometryDocument9 pagesNotes and Formulae SPM Mathematics Form 1 - 3 Notes Solid GeometryJarnice Ling Yee ChingNo ratings yet
- Applications of Products of Vectors: Lecture No.6Document7 pagesApplications of Products of Vectors: Lecture No.6Mohamed Maher100% (1)
- Math 3Document68 pagesMath 3Phono CompNo ratings yet
- PlymouthUniversity MathsandStats Matrix MultiplicationDocument37 pagesPlymouthUniversity MathsandStats Matrix MultiplicationGood DeedsNo ratings yet
- Matrix Algebra: MotivationDocument12 pagesMatrix Algebra: MotivationSaumil ShahNo ratings yet
- Recurrence Relations: Mathematical Models, Analysis TechniquesDocument38 pagesRecurrence Relations: Mathematical Models, Analysis TechniquesMadeehah AatifNo ratings yet
- IGCSE Additional Mathematics 0606 - 11 Paper 1 May - Jun 2023Document11 pagesIGCSE Additional Mathematics 0606 - 11 Paper 1 May - Jun 2023shadybitxhespamNo ratings yet
- The Joy of Matrix MathsDocument5 pagesThe Joy of Matrix MathsBryanLaiNo ratings yet
- Chapter 10 Matrices and Determinants: AlgebraDocument15 pagesChapter 10 Matrices and Determinants: AlgebraDinesh KumarNo ratings yet
- Instructor'S Manual To Accompany Charles Kittel Introduction To Solid State PhysicsDocument62 pagesInstructor'S Manual To Accompany Charles Kittel Introduction To Solid State Physicsn4meNo ratings yet
- CBSE Class 10 Maths Paper SolutionDocument29 pagesCBSE Class 10 Maths Paper SolutionSantanuNo ratings yet
- Notes On Kronecker Products: 1 The Stack OperatorDocument4 pagesNotes On Kronecker Products: 1 The Stack Operatoraimal0% (1)
- Class X Maths (S) 23-24 Pre-Board SolDocument26 pagesClass X Maths (S) 23-24 Pre-Board Sol12345krish0guptaNo ratings yet
- Algoritma Divide and Conquer (2021) Bagian3Document37 pagesAlgoritma Divide and Conquer (2021) Bagian3Fatinul SNo ratings yet
- PSQT Imp QuestionsDocument2 pagesPSQT Imp QuestionsSai Santhosh100% (1)
- Introduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsDocument42 pagesIntroduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsFaryal BatoolNo ratings yet
- O Level AddMathsDocument15 pagesO Level AddMathsShaun GadzikwaNo ratings yet
- Midterm ProjectDocument15 pagesMidterm Projectkaren perrerasNo ratings yet
- 50 ItemsDocument6 pages50 ItemsRonald Punay IntinaNo ratings yet
- 2005level2 SolutionsDocument8 pages2005level2 SolutionsRaghav guptaNo ratings yet
- Numerical Solutions To CE Problems 1Document3 pagesNumerical Solutions To CE Problems 1aryastark1303No ratings yet
- Maths 1stDocument4 pagesMaths 1stguruchoudhary1012No ratings yet
- MTH 202Document209 pagesMTH 202ThuanNo ratings yet
- 2014 Preprint Tort 1 PDFDocument5 pages2014 Preprint Tort 1 PDFElaine MarrielNo ratings yet
- 4MA0 4HR Que 20140115Document24 pages4MA0 4HR Que 20140115Lalith77No ratings yet
- General Mathematics: Learning Activity Sheet Simple and General AnnuitiesDocument14 pagesGeneral Mathematics: Learning Activity Sheet Simple and General AnnuitiesMauro UbungenNo ratings yet
- Reveiwer Grade10Document20 pagesReveiwer Grade10Norman A ReyesNo ratings yet
- UNIT 2 Binomial TheoremDocument3 pagesUNIT 2 Binomial TheoremBilly Jasper DomingoNo ratings yet
- Ab Initio MethodsDocument52 pagesAb Initio MethodsLuis SosaNo ratings yet
- Mubashir Abbas: Personal InformationDocument3 pagesMubashir Abbas: Personal InformationRaja Muhammad NomanNo ratings yet
- Envelopes and Sharp Embeddings of Function Spaces PDFDocument25 pagesEnvelopes and Sharp Embeddings of Function Spaces PDFKala SthalaNo ratings yet
- An Improved Bilevel Evolutionary Algorithm Based On Quadratic ApproximationsDocument15 pagesAn Improved Bilevel Evolutionary Algorithm Based On Quadratic ApproximationsDilan SahinNo ratings yet
- CS490 Advanced Topics in Computing (Deep Learning)Document37 pagesCS490 Advanced Topics in Computing (Deep Learning)Afaq AhmedNo ratings yet
- MTH101 TutorialDocument2 pagesMTH101 TutorialOnochie EnunwaonyeNo ratings yet
- The Meaning of Einstein Field EquationsDocument8 pagesThe Meaning of Einstein Field EquationsShivank MehraNo ratings yet
- UEM Sol To Exerc Chap 096Document9 pagesUEM Sol To Exerc Chap 096sibieNo ratings yet
- Optimization of Chemical Processes: Course Code: 13CH1136 L TPC 4 1 0 3Document2 pagesOptimization of Chemical Processes: Course Code: 13CH1136 L TPC 4 1 0 3victorNo ratings yet
- Maths Guidelines For Board Exams PDFDocument11 pagesMaths Guidelines For Board Exams PDFheenaNo ratings yet
- How To Define and Solve Polynomials in Scilab: P (X) A X +a X +a X + +a XDocument3 pagesHow To Define and Solve Polynomials in Scilab: P (X) A X +a X +a X + +a XCharlyn FloresNo ratings yet
- Diffusion EquationDocument22 pagesDiffusion EquationTaterRayGumfriesNo ratings yet
- Traveling Salesman ProblemDocument11 pagesTraveling Salesman ProblemdeardestinyNo ratings yet
- Chapter 2 SOlucionario Ahuja .. Network FlowDocument7 pagesChapter 2 SOlucionario Ahuja .. Network FlowCarlos Alberto CuevasNo ratings yet
- MVT Indetermimate Sphere PDFDocument31 pagesMVT Indetermimate Sphere PDFSarthak SharmaNo ratings yet