Download as pdf or txt
You might also like
- Automatic College Bell Original ReportDocument97 pagesAutomatic College Bell Original ReportAbhishek Mahajan100% (1)
- B O - Beocenter 9500 SMDocument104 pagesB O - Beocenter 9500 SMNiels H Kristensen100% (1)
- Samsung Sync Master 226bw 206bw Service ManualDocument79 pagesSamsung Sync Master 226bw 206bw Service ManualJuli AltamiranoNo ratings yet
- The Zx97 ComputerDocument13 pagesThe Zx97 ComputerhansolosnahNo ratings yet
- ECEL515 Lec05 TV FundamentalsDocument44 pagesECEL515 Lec05 TV FundamentalsJirah GicangaoNo ratings yet
- LCD TV Presentation SpeechDocument3 pagesLCD TV Presentation SpeechRomin ParekhNo ratings yet
- Submitted To: Suman Rani, Submitted By:: VishalDocument15 pagesSubmitted To: Suman Rani, Submitted By:: VishalJoginder PannuNo ratings yet
- Camera TubesDocument51 pagesCamera TubesdexterNo ratings yet
- Project: Burglar Alarm System Using Latching CircuitDocument10 pagesProject: Burglar Alarm System Using Latching CircuitSuyash DharaskarNo ratings yet
- MDT75C271: 1. General DescriptionDocument6 pagesMDT75C271: 1. General DescriptionAnselmo LimaNo ratings yet
- Perfomrance Analysis - Image QualityDocument11 pagesPerfomrance Analysis - Image QualityYousef ElganzouryNo ratings yet
- Digital To Analog ConverterDocument4 pagesDigital To Analog Converterzahid_shadinNo ratings yet
- DLC J OBE PresentationGroup-06Document8 pagesDLC J OBE PresentationGroup-06Hellion HellionNo ratings yet
- Narrow Bandwidth Television Association: Adding Sync Pulses To The Video SignalDocument2 pagesNarrow Bandwidth Television Association: Adding Sync Pulses To The Video SignalSebastian CostaNo ratings yet
- Lecture3 PDFDocument19 pagesLecture3 PDFAvijit RanaNo ratings yet
- Adaptive Temporal Aperture Control For Improving Motion Image Quality of OLED DisplayDocument11 pagesAdaptive Temporal Aperture Control For Improving Motion Image Quality of OLED DisplayAndrew LiebermannNo ratings yet
- Icom IC-R9000L Instruction ManualDocument72 pagesIcom IC-R9000L Instruction ManualYayok S. AnggoroNo ratings yet
- Experiment:9 ,:, AIM:-Software Used: - TheoryDocument10 pagesExperiment:9 ,:, AIM:-Software Used: - TheoryAshwani kumar kushwahaNo ratings yet
- CCTV BasicsDocument23 pagesCCTV BasicsKasiviswanathan Ramanathan50% (4)
- Restoring The Sony MicroDocument20 pagesRestoring The Sony MicroBao ThangNo ratings yet
- Metal Detection RobotDocument40 pagesMetal Detection Robotsashirocky100% (2)
- Implementing Ultrasonic Ranging: Theory of OperationDocument19 pagesImplementing Ultrasonic Ranging: Theory of OperationMargaritoPitiminiNo ratings yet
- Phy Activity P-IDocument12 pagesPhy Activity P-INaveenNo ratings yet
- Project Report On Shutter GuardDocument31 pagesProject Report On Shutter GuardNikil.A HadiNo ratings yet
- Unit1 OscilloscopeFamiliarization RSealey PlainDocument13 pagesUnit1 OscilloscopeFamiliarization RSealey Plainrob100% (1)
- Data CommunicationsDocument94 pagesData Communicationsmyatheinkhant119No ratings yet
- AVR600 Service Manual: Issue 1.2Document89 pagesAVR600 Service Manual: Issue 1.2王军No ratings yet
- ADE Exp11Document7 pagesADE Exp11Sai PrateikNo ratings yet
- 06 June 1996 PDFDocument116 pages06 June 1996 PDFAnonymous jTPeOa9DNo ratings yet
- Ade 11 BBDocument8 pagesAde 11 BBBhuvan BeeraNo ratings yet
- CCTV BasicsDocument23 pagesCCTV Basicsjiguparmar20094903No ratings yet
- ECE 271 Lab 2 DachinhsuaDocument21 pagesECE 271 Lab 2 Dachinhsuaphuongphan.270104No ratings yet
- Performance of A 1.35na Arf Immersion Lithography System For 40Nm ApplicationsDocument14 pagesPerformance of A 1.35na Arf Immersion Lithography System For 40Nm ApplicationscaokovskyNo ratings yet
- CCTV Training Material-2008Document78 pagesCCTV Training Material-2008KAZIMALI25100% (5)
- Network Introduction - 1Document78 pagesNetwork Introduction - 1kusumNo ratings yet
- Ade 11 AshiDocument8 pagesAde 11 AshiBhuvan BeeraNo ratings yet
- Introduction To How Camcorders WorkDocument15 pagesIntroduction To How Camcorders Worksaravvanon_murthyNo ratings yet
- MPLAB Tutorial Using Assembly Language For The PIC16F877 WitDocument23 pagesMPLAB Tutorial Using Assembly Language For The PIC16F877 WitPumzile FaleniNo ratings yet
- 3-Dimensional Television: Presented by Sabeel Zeashan - 04084065Document22 pages3-Dimensional Television: Presented by Sabeel Zeashan - 04084065rahmrdNo ratings yet
- Shift Registers: Socketed 74LS164 8-Bit Shift Register ChipDocument46 pagesShift Registers: Socketed 74LS164 8-Bit Shift Register Chipangelgalaxylife87No ratings yet
- Digital Circuits: Santanu ChattopadhyayDocument105 pagesDigital Circuits: Santanu ChattopadhyaylvrevathiNo ratings yet
- $basicsofvlsi 160504113140 PDFDocument55 pages$basicsofvlsi 160504113140 PDFRaja PosupoNo ratings yet
- Delbruck Funwithasynsensors 2012Document10 pagesDelbruck Funwithasynsensors 2012ctorreshhNo ratings yet
- Brian Schmidt: Principles in Data ReductionDocument76 pagesBrian Schmidt: Principles in Data ReductionArni SopiantiNo ratings yet
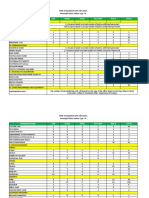
- Table of Equipment and AllowancesDocument4 pagesTable of Equipment and AllowancesFernandezJonathan PangasinanPPO100% (2)
- Introduction To MIS: Components & Role of MISDocument31 pagesIntroduction To MIS: Components & Role of MISAbu BasharNo ratings yet
- Digital Video SignalDocument29 pagesDigital Video SignalKamal Singh RajputNo ratings yet
- Proposal Mini Project Micro PDocument7 pagesProposal Mini Project Micro PNisa AlyaNo ratings yet
- ADE Exp11Document7 pagesADE Exp11Bhuvan BeeraNo ratings yet
- A New Digital Llluminance-Meter With A Special Luminance-TubeadapterDocument3 pagesA New Digital Llluminance-Meter With A Special Luminance-Tubeadaptersoffter2000No ratings yet
- Tech SeminarDocument33 pagesTech SeminarShashidhar KarravulaNo ratings yet
- DTM MICROPROJECTDocument10 pagesDTM MICROPROJECTOm patil 164No ratings yet
- Automatic Night Lamp With Morning AlarmDocument7 pagesAutomatic Night Lamp With Morning Alarm152ISSHIKA SINHANo ratings yet
- Minor Project On Liquid Level: SensorDocument7 pagesMinor Project On Liquid Level: Sensorsssachin72No ratings yet
- Convolutional CodesDocument26 pagesConvolutional CodesPiyush MittalNo ratings yet
- Video Mixer: Part 1: Video Switching BoardDocument6 pagesVideo Mixer: Part 1: Video Switching BoardAg CristianNo ratings yet
- Recent PHD ResultDocument72 pagesRecent PHD ResultSavita Kiran BNo ratings yet
- Conveyor BeltsDocument6 pagesConveyor BeltsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Slides Measuring and Debugging CAN and CAN FDDocument99 pagesSlides Measuring and Debugging CAN and CAN FDSrinibasNo ratings yet
- Selecting Video Monitors For The Home Features Of The Best Video MonitorFrom EverandSelecting Video Monitors For The Home Features Of The Best Video MonitorNo ratings yet
- Monte Carlo Frameworks: Building Customisable High-performance C++ ApplicationsFrom EverandMonte Carlo Frameworks: Building Customisable High-performance C++ ApplicationsRating: 1.5 out of 5 stars1.5/5 (2)
- Baics of AI: by Prof S R Sakhare Electronics and Telecommunication Department A G Patil Institute of Technology, SolapurDocument5 pagesBaics of AI: by Prof S R Sakhare Electronics and Telecommunication Department A G Patil Institute of Technology, SolapurSurekha SakhareNo ratings yet
- Lecture3 - 3 - Structure of AgentsDocument22 pagesLecture3 - 3 - Structure of AgentsSurekha SakhareNo ratings yet
- Lecture3 3 2 EnvironmentDocument11 pagesLecture3 3 2 EnvironmentSurekha SakhareNo ratings yet
- Comparison of AI, ML, DLDocument10 pagesComparison of AI, ML, DLSurekha SakhareNo ratings yet
- Introduction To Artificial IntelligenceDocument19 pagesIntroduction To Artificial IntelligenceSurekha SakhareNo ratings yet
- Cpts 440 / 540 Artificial Intelligence: Logical ReasoningDocument77 pagesCpts 440 / 540 Artificial Intelligence: Logical ReasoningSurekha SakhareNo ratings yet
- Cpts 440 / 540 Artificial Intelligence: Knowledge RepresentationDocument95 pagesCpts 440 / 540 Artificial Intelligence: Knowledge RepresentationSurekha SakhareNo ratings yet
- Cpts 440 / 540 Artificial Intelligence: SearchDocument182 pagesCpts 440 / 540 Artificial Intelligence: SearchSurekha SakhareNo ratings yet
- Gyro To NMEA Convertor ManualDocument54 pagesGyro To NMEA Convertor ManualJay SanchaniyaNo ratings yet
- ROVER DM14B - USer - GuideDocument112 pagesROVER DM14B - USer - GuideAndreaNo ratings yet
- LG Cl-18 Lb563t 563le Lb563t-Gr-gt TFT LCD Full 730Document26 pagesLG Cl-18 Lb563t 563le Lb563t-Gr-gt TFT LCD Full 730Fidel ArroyoNo ratings yet
- Service Manual: 17-Inch LCD Monitor f1723/FP7317/L1702/ vf17/FP17Document27 pagesService Manual: 17-Inch LCD Monitor f1723/FP7317/L1702/ vf17/FP17Juan Nepomuceno Cortina GoseacocheaNo ratings yet
- TV SEMPO Chino Modelo PME-42S6Document66 pagesTV SEMPO Chino Modelo PME-42S6edgardo2004No ratings yet
- Hello UDocument14 pagesHello UMNAVNo ratings yet
- Questions On Digital Signal ProseccesingDocument16 pagesQuestions On Digital Signal ProseccesingMUSHTAREEN HARLAPURNo ratings yet
- ARM DatasheetDocument365 pagesARM DatasheettienthangvietNo ratings yet
- DSD Lab 12 HandoutDocument4 pagesDSD Lab 12 HandoutMuhammad AnasNo ratings yet
- V5-H Sensorless Vector Control Frequency Inverter ManualDocument168 pagesV5-H Sensorless Vector Control Frequency Inverter ManualRuben EscobarNo ratings yet
- Samsung LE26S81BHX Chassis GJA26TSADocument159 pagesSamsung LE26S81BHX Chassis GJA26TSANina SeimeniNo ratings yet
- 2N Easy Gate PRO User Guide en 1.4Document78 pages2N Easy Gate PRO User Guide en 1.4Sry SantosNo ratings yet
- Service Manual 7M01BDocument35 pagesService Manual 7M01BOrlando Jose100% (1)
- Pana Bežični Manujal kx-tcd150FXDocument77 pagesPana Bežični Manujal kx-tcd150FXi4004No ratings yet
- 1zzge PinoutDocument5 pages1zzge PinoutTeigan OkeeffeNo ratings yet
- Navigation and Communication Final DrawingDocument177 pagesNavigation and Communication Final DrawingvladislavirusvldNo ratings yet
- 10 KW TV TransmitterDocument58 pages10 KW TV TransmitterKirti Khandelwal80% (5)
- Product Specification PDFDocument15 pagesProduct Specification PDFHedenarol Ramirez RojasNo ratings yet
- Telephone: Fax: Sales Tax Registration No.:: Manufacturer: Model: Year: Registration: Mileage: Job Number: DateDocument5 pagesTelephone: Fax: Sales Tax Registration No.:: Manufacturer: Model: Year: Registration: Mileage: Job Number: DateWawan SatiawanNo ratings yet
- Et15 Et17 Et19Document207 pagesEt15 Et17 Et19agus2kNo ratings yet
- Pulse Amplitude ModulationDocument4 pagesPulse Amplitude ModulationSuzette SabidoNo ratings yet
- Answer Key For Basic Television and Video Systems by Bernard GrobDocument15 pagesAnswer Key For Basic Television and Video Systems by Bernard GrobRime CurtanNo ratings yet
- Philips Chassis Tpm5.2e-La PDFDocument59 pagesPhilips Chassis Tpm5.2e-La PDFIONo ratings yet
- Senior Science NotesDocument7 pagesSenior Science NotesnevanaaaNo ratings yet
- Broadcasting - Television and Video: Page 1 of 14Document14 pagesBroadcasting - Television and Video: Page 1 of 14Denaiya Watton LeehNo ratings yet
- SHA-MAN-0350 Ver6 Print WebDocument72 pagesSHA-MAN-0350 Ver6 Print WebJoseCRoderoNo ratings yet
- 03 Product SpecificationDocument10 pages03 Product Specificationxor_45No ratings yet