
EDNI Ebook TM Automotive - 35
EDNI Ebook TM Automotive - 35
You might also like
- ISO#SAE 21434 2021 (E) - Character PDF DocumentDocument7 pagesISO#SAE 21434 2021 (E) - Character PDF Documentlepasmi42No ratings yet
- IEC62304 ChecklistDocument6 pagesIEC62304 ChecklistuclealsepNo ratings yet
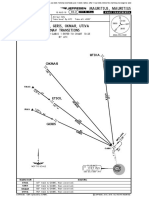
- Mauritius, Mauritius Fimp/Mru: Etsol, Geris, Okmar, Utiva Rnav TransitionsDocument36 pagesMauritius, Mauritius Fimp/Mru: Etsol, Geris, Okmar, Utiva Rnav TransitionsTweed3A100% (3)
- JSSSEH Implementation Guide 20028 - SmithDocument22 pagesJSSSEH Implementation Guide 20028 - Smith135 cashewNo ratings yet
- The 62443 Series of StandardsDocument4 pagesThe 62443 Series of StandardsAnonymous CTQqbhMONo ratings yet
- Guidebook To ISO26262Document18 pagesGuidebook To ISO26262Евгений БульбаNo ratings yet
- 07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutDocument33 pages07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutsunithaNo ratings yet
- Automotive SPICE Process Reference Model: TitleDocument47 pagesAutomotive SPICE Process Reference Model: TitleHoa LuuNo ratings yet
- Interface control document The Ultimate Step-By-Step GuideFrom EverandInterface control document The Ultimate Step-By-Step GuideNo ratings yet
- 2009 - Chess Life 12Document76 pages2009 - Chess Life 12KurokreNo ratings yet
- Quality Assurance in China Ebook V2.0Document9 pagesQuality Assurance in China Ebook V2.0Roberto AraizaNo ratings yet
- Applied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Document29 pagesApplied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Girish KasturiNo ratings yet
- Verification and Validation According To ISO 26262Document8 pagesVerification and Validation According To ISO 26262최재호No ratings yet
- Everything You Should Know About Functional SafetyDocument20 pagesEverything You Should Know About Functional SafetyMark GarnettNo ratings yet
- ISO 26262 - Tool Chain Analysis PDFDocument12 pagesISO 26262 - Tool Chain Analysis PDFasertiva13No ratings yet
- Agile in Automotive - State of Practice 2015Document72 pagesAgile in Automotive - State of Practice 2015GhaziElKhamsaNo ratings yet
- Impact Analysis LinkedInDocument7 pagesImpact Analysis LinkedInAleksandr Vasilev100% (1)
- Automotive SPIC PDFDocument142 pagesAutomotive SPIC PDFJohn ChenNo ratings yet
- CSMS Solutions Brief v4Document2 pagesCSMS Solutions Brief v4Ehsan ArbabtaftiNo ratings yet
- Functional Safety Considerations in Battery DesignDocument6 pagesFunctional Safety Considerations in Battery DesignMarian VerdeNo ratings yet
- Functional Safety in Automotive Electronics: Zhang Xinbo, Luo FengDocument8 pagesFunctional Safety in Automotive Electronics: Zhang Xinbo, Luo FengVinoth kumarNo ratings yet
- Rimac Automobili Cybersecurity EngDocument1 pageRimac Automobili Cybersecurity EngudbarryNo ratings yet
- Autosar IntroDocument54 pagesAutosar IntroaravindNo ratings yet
- ASPICE 6 Ver - 1Document4 pagesASPICE 6 Ver - 1raghunayagan PNo ratings yet
- 02 ASpice-Intro Motivation&BasicConceptsDocument56 pages02 ASpice-Intro Motivation&BasicConceptsevan leeNo ratings yet
- Aspice Ver. 3.0: Presented By: Srinivas NawaliDocument54 pagesAspice Ver. 3.0: Presented By: Srinivas NawalisunithaNo ratings yet
- Tuvsud Functional Safety in A Nutshell InfographicDocument1 pageTuvsud Functional Safety in A Nutshell InfographicSrinivas KothapalliNo ratings yet
- Day4 English 2017 0509Document35 pagesDay4 English 2017 0509pradhan1987No ratings yet
- 000004100Document34 pages000004100v53No ratings yet
- Whitepaper 2021 State of Automotive Software Development Survey Results finalqTMdcbRBTon4hNhuQ3SsW52DcmMkCemcZovqfbmEDocument27 pagesWhitepaper 2021 State of Automotive Software Development Survey Results finalqTMdcbRBTon4hNhuQ3SsW52DcmMkCemcZovqfbmEajaydeshpande2001No ratings yet
- SAFE - Final Specification For Comparison of ArchitectureDocument74 pagesSAFE - Final Specification For Comparison of ArchitectureimadNo ratings yet
- ISO/SAE 21434: Setting The Standard For Connected Cars' CybersecurityDocument47 pagesISO/SAE 21434: Setting The Standard For Connected Cars' CybersecurityCom DigfulNo ratings yet
- Aspice 6Document7 pagesAspice 6raghunayagan PNo ratings yet
- GP - Cybersecurity in Automotive - WP v1-2022-11-29 PublicRls SIGNEDDocument16 pagesGP - Cybersecurity in Automotive - WP v1-2022-11-29 PublicRls SIGNEDMahdi KhaldiNo ratings yet
- Risk Risk Advisory Automotive Software Quality EN SDocument14 pagesRisk Risk Advisory Automotive Software Quality EN STrendkill Trendkill TrendkillNo ratings yet
- Engine Control Failure Test Using HILS - Aisar RomasDocument19 pagesEngine Control Failure Test Using HILS - Aisar RomasAisar Labibi Romas100% (1)
- GMG System Safety For Autonomous Mining White PaperDocument27 pagesGMG System Safety For Autonomous Mining White PaperCesar BenavidesNo ratings yet
- Iso15408 2Document354 pagesIso15408 2Rowatinex RosNo ratings yet
- Certkitiec SLDV CDT PDFDocument15 pagesCertkitiec SLDV CDT PDFÍcaro VianaNo ratings yet
- Model-Based Testing of Automotive Systems: Piketec GMBH, GermanyDocument9 pagesModel-Based Testing of Automotive Systems: Piketec GMBH, GermanyGururaj BandaNo ratings yet
- Note Assess ReportDocument7 pagesNote Assess Reporten ziaNo ratings yet
- AUTOSAR LayeredSoftwareArchitectureDocument46 pagesAUTOSAR LayeredSoftwareArchitectureGiridharNo ratings yet
- Cybersecurity Best Practices Safety Modern Vehicles 2022 Pre Final Tag - 0 - 0Document25 pagesCybersecurity Best Practices Safety Modern Vehicles 2022 Pre Final Tag - 0 - 0AmiroNo ratings yet
- The Iacs Cybersecurity Certification FrameworkDocument205 pagesThe Iacs Cybersecurity Certification Frameworkmarcelo.lacknerNo ratings yet
- IEC Certification Kit: Simulink Test ™ Conformance Demonstration TemplateDocument16 pagesIEC Certification Kit: Simulink Test ™ Conformance Demonstration TemplateJanos KovacsNo ratings yet
- Functional Safety Embedded Systems: Integration of in The Development Process ofDocument34 pagesFunctional Safety Embedded Systems: Integration of in The Development Process ofAleksandar MilinkovicNo ratings yet
- Autosar Brochure enDocument4 pagesAutosar Brochure enMiha_BucurestiNo ratings yet
- Quality StandardsDocument49 pagesQuality StandardsyesidNo ratings yet
- CHAPTER 1: AUTOSAR Fundamentals Topics CoveredDocument14 pagesCHAPTER 1: AUTOSAR Fundamentals Topics CoveredSujit KumarNo ratings yet
- ISO26262 and IEC61508Document12 pagesISO26262 and IEC61508최재호100% (1)
- Master's Thesis: Model-Based Testing With Simulink Design VerifierDocument93 pagesMaster's Thesis: Model-Based Testing With Simulink Design VerifierBalajee AsokanNo ratings yet
- D2A1 1 2 ESL Virtual Hardware SetupDocument15 pagesD2A1 1 2 ESL Virtual Hardware SetupRaj Shekhar ReddyNo ratings yet
- Autom Motiv e Hard Dware ISO e Deve O 262 Elopm 262 Ment A Accord Ing To oDocument5 pagesAutom Motiv e Hard Dware ISO e Deve O 262 Elopm 262 Ment A Accord Ing To orahul1990bhatiaNo ratings yet
- Iit KharagpurDocument39 pagesIit KharagpurBhupendra KharpuseNo ratings yet
- Iso 26262-1Document44 pagesIso 26262-1chanti1348072100% (1)
- Functional SafetyDocument8 pagesFunctional SafetyMiceasnagovNo ratings yet
- EY Ev Adoption Potential Impact in India July 2016 PDFDocument8 pagesEY Ev Adoption Potential Impact in India July 2016 PDFAbhishek JainNo ratings yet
- 13183-Safety Management Electric 070518 v2b TagDocument83 pages13183-Safety Management Electric 070518 v2b Tagahmedhamdi731No ratings yet
- 05 - Lesson 3 Safety Frameworks For Self Driving - C1M3L3 - Safety - Frameworks - For - Self Driving PDFDocument24 pages05 - Lesson 3 Safety Frameworks For Self Driving - C1M3L3 - Safety - Frameworks - For - Self Driving PDFprogisNo ratings yet
- Safety Technology in Automobile: Gourish S Vastrad 1AY15ME047 Guide: Dr. Srinivas BhattDocument16 pagesSafety Technology in Automobile: Gourish S Vastrad 1AY15ME047 Guide: Dr. Srinivas BhattGOURISH S VASTRADNo ratings yet
- Zonal-Architecture-White-Paper (Tendencias Automotrices)Document24 pagesZonal-Architecture-White-Paper (Tendencias Automotrices)JESUS JUAREZ PEÑUELANo ratings yet
- Learning Yii Testing - Sample ChapterDocument20 pagesLearning Yii Testing - Sample ChapterPackt PublishingNo ratings yet
- Bob Pease AnalogDocument57 pagesBob Pease AnalogRoberto AraizaNo ratings yet
- Chesslife April 2010Document84 pagesChesslife April 2010Roberto AraizaNo ratings yet
- Microsoft MS DOS 6 PDFDocument146 pagesMicrosoft MS DOS 6 PDFRoberto AraizaNo ratings yet
- Devaney - A 1st Course in Chaotic Dynamical Systems (1992)Document161 pagesDevaney - A 1st Course in Chaotic Dynamical Systems (1992)Anahvic ToriyamaNo ratings yet
- Adam, Future Matters Challenge For Social Theory and Social InquiryDocument10 pagesAdam, Future Matters Challenge For Social Theory and Social InquiryGeeNo ratings yet
- Moore and Mealy MachinesDocument5 pagesMoore and Mealy MachinesThahsin ThahirNo ratings yet
- Testing Interview QuestionsDocument1 pageTesting Interview Questionspriyakrish17No ratings yet
- Ee09 l07 Digital Control System Model QPDocument4 pagesEe09 l07 Digital Control System Model QPGīřïşh McNo ratings yet
- Reliability Centered Maintenance ExplainationDocument6 pagesReliability Centered Maintenance Explainationambuenaflor100% (1)
- Deep LearningDocument39 pagesDeep LearningwilliamNo ratings yet
- Chapter 3 RequiremenntsDocument43 pagesChapter 3 RequiremenntsPeter KoromaNo ratings yet
- Lecture-1 Control SystemDocument44 pagesLecture-1 Control SystemKuldeep SahayNo ratings yet
- 19me21p1 PDFDocument2 pages19me21p1 PDFbhargavramudu 2019No ratings yet
- Knowledge Areas Required To Become A Successful Instrument Engineer and Instrument Technician Learning Instrumentation and Control EngineeringDocument3 pagesKnowledge Areas Required To Become A Successful Instrument Engineer and Instrument Technician Learning Instrumentation and Control EngineeringNGASSAKI ATONGUI Christ HubertNo ratings yet
- ICE Optim Linea PDFDocument68 pagesICE Optim Linea PDFsatydevsinghnegiNo ratings yet
- Module 2 - XI NEET - ChemistryDocument152 pagesModule 2 - XI NEET - ChemistryParas SontakkeNo ratings yet
- Analysis of Internal Combustion Engines PDFDocument10 pagesAnalysis of Internal Combustion Engines PDFDuran NaidooNo ratings yet
- DSP Lab External QuestionsDocument3 pagesDSP Lab External Questionsharis_j50% (2)
- EE 424 #1: Sampling and ReconstructionDocument30 pagesEE 424 #1: Sampling and ReconstructionArunShanNo ratings yet
- Course OutlineDocument4 pagesCourse OutlineJerold Rommelson LumiaresNo ratings yet
- Transient Response Stability: Solutions To Case Studies Challenges Antenna Control: Stability Design Via GainDocument43 pagesTransient Response Stability: Solutions To Case Studies Challenges Antenna Control: Stability Design Via Gain오유택No ratings yet
- Software Testing and Quality Assurance: Basic Concepts and PreliminariesDocument26 pagesSoftware Testing and Quality Assurance: Basic Concepts and PreliminariesIrga GuantenkzNo ratings yet
- Module 3Document12 pagesModule 3Jocelyn garcia gonzalezNo ratings yet
- MITRES 6 008S11 Lec02Document8 pagesMITRES 6 008S11 Lec02Chetan MaheshwariNo ratings yet
- Manper (Mungkin Ini Ets)Document7 pagesManper (Mungkin Ini Ets)rismanurkayNo ratings yet
- Introduction To Software Architecture: SE464/CS446/ECE452Document26 pagesIntroduction To Software Architecture: SE464/CS446/ECE452morphyjackNo ratings yet
- 4 TH BatchDocument37 pages4 TH Batchanil kumarNo ratings yet
- VMS PendahuluanDocument20 pagesVMS PendahuluanAfrendy BayuNo ratings yet
- Multi-Task Learning For Detecting and Segmenting Manipulated Facial Images and VideosDocument8 pagesMulti-Task Learning For Detecting and Segmenting Manipulated Facial Images and Videoszeeeshan khanNo ratings yet
- Ilc Intro Pdftex03 03Document59 pagesIlc Intro Pdftex03 03KARKAR NORANo ratings yet





























































































Download as pdf or txt
You might also like
- ISO#SAE 21434 2021 (E) - Character PDF DocumentDocument7 pagesISO#SAE 21434 2021 (E) - Character PDF Documentlepasmi42No ratings yet
- IEC62304 ChecklistDocument6 pagesIEC62304 ChecklistuclealsepNo ratings yet
- Mauritius, Mauritius Fimp/Mru: Etsol, Geris, Okmar, Utiva Rnav TransitionsDocument36 pagesMauritius, Mauritius Fimp/Mru: Etsol, Geris, Okmar, Utiva Rnav TransitionsTweed3A100% (3)
- JSSSEH Implementation Guide 20028 - SmithDocument22 pagesJSSSEH Implementation Guide 20028 - Smith135 cashewNo ratings yet
- The 62443 Series of StandardsDocument4 pagesThe 62443 Series of StandardsAnonymous CTQqbhMONo ratings yet
- Guidebook To ISO26262Document18 pagesGuidebook To ISO26262Евгений БульбаNo ratings yet
- 07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutDocument33 pages07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutsunithaNo ratings yet
- Automotive SPICE Process Reference Model: TitleDocument47 pagesAutomotive SPICE Process Reference Model: TitleHoa LuuNo ratings yet
- Interface control document The Ultimate Step-By-Step GuideFrom EverandInterface control document The Ultimate Step-By-Step GuideNo ratings yet
- 2009 - Chess Life 12Document76 pages2009 - Chess Life 12KurokreNo ratings yet
- Quality Assurance in China Ebook V2.0Document9 pagesQuality Assurance in China Ebook V2.0Roberto AraizaNo ratings yet
- Applied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Document29 pagesApplied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Girish KasturiNo ratings yet
- Verification and Validation According To ISO 26262Document8 pagesVerification and Validation According To ISO 26262최재호No ratings yet
- Everything You Should Know About Functional SafetyDocument20 pagesEverything You Should Know About Functional SafetyMark GarnettNo ratings yet
- ISO 26262 - Tool Chain Analysis PDFDocument12 pagesISO 26262 - Tool Chain Analysis PDFasertiva13No ratings yet
- Agile in Automotive - State of Practice 2015Document72 pagesAgile in Automotive - State of Practice 2015GhaziElKhamsaNo ratings yet
- Impact Analysis LinkedInDocument7 pagesImpact Analysis LinkedInAleksandr Vasilev100% (1)
- Automotive SPIC PDFDocument142 pagesAutomotive SPIC PDFJohn ChenNo ratings yet
- CSMS Solutions Brief v4Document2 pagesCSMS Solutions Brief v4Ehsan ArbabtaftiNo ratings yet
- Functional Safety Considerations in Battery DesignDocument6 pagesFunctional Safety Considerations in Battery DesignMarian VerdeNo ratings yet
- Functional Safety in Automotive Electronics: Zhang Xinbo, Luo FengDocument8 pagesFunctional Safety in Automotive Electronics: Zhang Xinbo, Luo FengVinoth kumarNo ratings yet
- Rimac Automobili Cybersecurity EngDocument1 pageRimac Automobili Cybersecurity EngudbarryNo ratings yet
- Autosar IntroDocument54 pagesAutosar IntroaravindNo ratings yet
- ASPICE 6 Ver - 1Document4 pagesASPICE 6 Ver - 1raghunayagan PNo ratings yet
- 02 ASpice-Intro Motivation&BasicConceptsDocument56 pages02 ASpice-Intro Motivation&BasicConceptsevan leeNo ratings yet
- Aspice Ver. 3.0: Presented By: Srinivas NawaliDocument54 pagesAspice Ver. 3.0: Presented By: Srinivas NawalisunithaNo ratings yet
- Tuvsud Functional Safety in A Nutshell InfographicDocument1 pageTuvsud Functional Safety in A Nutshell InfographicSrinivas KothapalliNo ratings yet
- Day4 English 2017 0509Document35 pagesDay4 English 2017 0509pradhan1987No ratings yet
- 000004100Document34 pages000004100v53No ratings yet
- Whitepaper 2021 State of Automotive Software Development Survey Results finalqTMdcbRBTon4hNhuQ3SsW52DcmMkCemcZovqfbmEDocument27 pagesWhitepaper 2021 State of Automotive Software Development Survey Results finalqTMdcbRBTon4hNhuQ3SsW52DcmMkCemcZovqfbmEajaydeshpande2001No ratings yet
- SAFE - Final Specification For Comparison of ArchitectureDocument74 pagesSAFE - Final Specification For Comparison of ArchitectureimadNo ratings yet
- ISO/SAE 21434: Setting The Standard For Connected Cars' CybersecurityDocument47 pagesISO/SAE 21434: Setting The Standard For Connected Cars' CybersecurityCom DigfulNo ratings yet
- Aspice 6Document7 pagesAspice 6raghunayagan PNo ratings yet
- GP - Cybersecurity in Automotive - WP v1-2022-11-29 PublicRls SIGNEDDocument16 pagesGP - Cybersecurity in Automotive - WP v1-2022-11-29 PublicRls SIGNEDMahdi KhaldiNo ratings yet
- Risk Risk Advisory Automotive Software Quality EN SDocument14 pagesRisk Risk Advisory Automotive Software Quality EN STrendkill Trendkill TrendkillNo ratings yet
- Engine Control Failure Test Using HILS - Aisar RomasDocument19 pagesEngine Control Failure Test Using HILS - Aisar RomasAisar Labibi Romas100% (1)
- GMG System Safety For Autonomous Mining White PaperDocument27 pagesGMG System Safety For Autonomous Mining White PaperCesar BenavidesNo ratings yet
- Iso15408 2Document354 pagesIso15408 2Rowatinex RosNo ratings yet
- Certkitiec SLDV CDT PDFDocument15 pagesCertkitiec SLDV CDT PDFÍcaro VianaNo ratings yet
- Model-Based Testing of Automotive Systems: Piketec GMBH, GermanyDocument9 pagesModel-Based Testing of Automotive Systems: Piketec GMBH, GermanyGururaj BandaNo ratings yet
- Note Assess ReportDocument7 pagesNote Assess Reporten ziaNo ratings yet
- AUTOSAR LayeredSoftwareArchitectureDocument46 pagesAUTOSAR LayeredSoftwareArchitectureGiridharNo ratings yet
- Cybersecurity Best Practices Safety Modern Vehicles 2022 Pre Final Tag - 0 - 0Document25 pagesCybersecurity Best Practices Safety Modern Vehicles 2022 Pre Final Tag - 0 - 0AmiroNo ratings yet
- The Iacs Cybersecurity Certification FrameworkDocument205 pagesThe Iacs Cybersecurity Certification Frameworkmarcelo.lacknerNo ratings yet
- IEC Certification Kit: Simulink Test ™ Conformance Demonstration TemplateDocument16 pagesIEC Certification Kit: Simulink Test ™ Conformance Demonstration TemplateJanos KovacsNo ratings yet
- Functional Safety Embedded Systems: Integration of in The Development Process ofDocument34 pagesFunctional Safety Embedded Systems: Integration of in The Development Process ofAleksandar MilinkovicNo ratings yet
- Autosar Brochure enDocument4 pagesAutosar Brochure enMiha_BucurestiNo ratings yet
- Quality StandardsDocument49 pagesQuality StandardsyesidNo ratings yet
- CHAPTER 1: AUTOSAR Fundamentals Topics CoveredDocument14 pagesCHAPTER 1: AUTOSAR Fundamentals Topics CoveredSujit KumarNo ratings yet
- ISO26262 and IEC61508Document12 pagesISO26262 and IEC61508최재호100% (1)
- Master's Thesis: Model-Based Testing With Simulink Design VerifierDocument93 pagesMaster's Thesis: Model-Based Testing With Simulink Design VerifierBalajee AsokanNo ratings yet
- D2A1 1 2 ESL Virtual Hardware SetupDocument15 pagesD2A1 1 2 ESL Virtual Hardware SetupRaj Shekhar ReddyNo ratings yet
- Autom Motiv e Hard Dware ISO e Deve O 262 Elopm 262 Ment A Accord Ing To oDocument5 pagesAutom Motiv e Hard Dware ISO e Deve O 262 Elopm 262 Ment A Accord Ing To orahul1990bhatiaNo ratings yet
- Iit KharagpurDocument39 pagesIit KharagpurBhupendra KharpuseNo ratings yet
- Iso 26262-1Document44 pagesIso 26262-1chanti1348072100% (1)
- Functional SafetyDocument8 pagesFunctional SafetyMiceasnagovNo ratings yet
- EY Ev Adoption Potential Impact in India July 2016 PDFDocument8 pagesEY Ev Adoption Potential Impact in India July 2016 PDFAbhishek JainNo ratings yet
- 13183-Safety Management Electric 070518 v2b TagDocument83 pages13183-Safety Management Electric 070518 v2b Tagahmedhamdi731No ratings yet
- 05 - Lesson 3 Safety Frameworks For Self Driving - C1M3L3 - Safety - Frameworks - For - Self Driving PDFDocument24 pages05 - Lesson 3 Safety Frameworks For Self Driving - C1M3L3 - Safety - Frameworks - For - Self Driving PDFprogisNo ratings yet
- Safety Technology in Automobile: Gourish S Vastrad 1AY15ME047 Guide: Dr. Srinivas BhattDocument16 pagesSafety Technology in Automobile: Gourish S Vastrad 1AY15ME047 Guide: Dr. Srinivas BhattGOURISH S VASTRADNo ratings yet
- Zonal-Architecture-White-Paper (Tendencias Automotrices)Document24 pagesZonal-Architecture-White-Paper (Tendencias Automotrices)JESUS JUAREZ PEÑUELANo ratings yet
- Learning Yii Testing - Sample ChapterDocument20 pagesLearning Yii Testing - Sample ChapterPackt PublishingNo ratings yet
- Bob Pease AnalogDocument57 pagesBob Pease AnalogRoberto AraizaNo ratings yet
- Chesslife April 2010Document84 pagesChesslife April 2010Roberto AraizaNo ratings yet
- Microsoft MS DOS 6 PDFDocument146 pagesMicrosoft MS DOS 6 PDFRoberto AraizaNo ratings yet
- Devaney - A 1st Course in Chaotic Dynamical Systems (1992)Document161 pagesDevaney - A 1st Course in Chaotic Dynamical Systems (1992)Anahvic ToriyamaNo ratings yet
- Adam, Future Matters Challenge For Social Theory and Social InquiryDocument10 pagesAdam, Future Matters Challenge For Social Theory and Social InquiryGeeNo ratings yet
- Moore and Mealy MachinesDocument5 pagesMoore and Mealy MachinesThahsin ThahirNo ratings yet
- Testing Interview QuestionsDocument1 pageTesting Interview Questionspriyakrish17No ratings yet
- Ee09 l07 Digital Control System Model QPDocument4 pagesEe09 l07 Digital Control System Model QPGīřïşh McNo ratings yet
- Reliability Centered Maintenance ExplainationDocument6 pagesReliability Centered Maintenance Explainationambuenaflor100% (1)
- Deep LearningDocument39 pagesDeep LearningwilliamNo ratings yet
- Chapter 3 RequiremenntsDocument43 pagesChapter 3 RequiremenntsPeter KoromaNo ratings yet
- Lecture-1 Control SystemDocument44 pagesLecture-1 Control SystemKuldeep SahayNo ratings yet
- 19me21p1 PDFDocument2 pages19me21p1 PDFbhargavramudu 2019No ratings yet
- Knowledge Areas Required To Become A Successful Instrument Engineer and Instrument Technician Learning Instrumentation and Control EngineeringDocument3 pagesKnowledge Areas Required To Become A Successful Instrument Engineer and Instrument Technician Learning Instrumentation and Control EngineeringNGASSAKI ATONGUI Christ HubertNo ratings yet
- ICE Optim Linea PDFDocument68 pagesICE Optim Linea PDFsatydevsinghnegiNo ratings yet
- Module 2 - XI NEET - ChemistryDocument152 pagesModule 2 - XI NEET - ChemistryParas SontakkeNo ratings yet
- Analysis of Internal Combustion Engines PDFDocument10 pagesAnalysis of Internal Combustion Engines PDFDuran NaidooNo ratings yet
- DSP Lab External QuestionsDocument3 pagesDSP Lab External Questionsharis_j50% (2)
- EE 424 #1: Sampling and ReconstructionDocument30 pagesEE 424 #1: Sampling and ReconstructionArunShanNo ratings yet
- Course OutlineDocument4 pagesCourse OutlineJerold Rommelson LumiaresNo ratings yet
- Transient Response Stability: Solutions To Case Studies Challenges Antenna Control: Stability Design Via GainDocument43 pagesTransient Response Stability: Solutions To Case Studies Challenges Antenna Control: Stability Design Via Gain오유택No ratings yet
- Software Testing and Quality Assurance: Basic Concepts and PreliminariesDocument26 pagesSoftware Testing and Quality Assurance: Basic Concepts and PreliminariesIrga GuantenkzNo ratings yet
- Module 3Document12 pagesModule 3Jocelyn garcia gonzalezNo ratings yet
- MITRES 6 008S11 Lec02Document8 pagesMITRES 6 008S11 Lec02Chetan MaheshwariNo ratings yet
- Manper (Mungkin Ini Ets)Document7 pagesManper (Mungkin Ini Ets)rismanurkayNo ratings yet
- Introduction To Software Architecture: SE464/CS446/ECE452Document26 pagesIntroduction To Software Architecture: SE464/CS446/ECE452morphyjackNo ratings yet
- 4 TH BatchDocument37 pages4 TH Batchanil kumarNo ratings yet
- VMS PendahuluanDocument20 pagesVMS PendahuluanAfrendy BayuNo ratings yet
- Multi-Task Learning For Detecting and Segmenting Manipulated Facial Images and VideosDocument8 pagesMulti-Task Learning For Detecting and Segmenting Manipulated Facial Images and Videoszeeeshan khanNo ratings yet
- Ilc Intro Pdftex03 03Document59 pagesIlc Intro Pdftex03 03KARKAR NORANo ratings yet