Download as pdf or txt
You might also like
- Seborg - Process Dynamics and Control 4th Ed 2017 Solutions PDFDocument572 pagesSeborg - Process Dynamics and Control 4th Ed 2017 Solutions PDFWilliam Manase89% (9)
- EPRI Vibration DiagnosticsDocument43 pagesEPRI Vibration DiagnosticsPULKIT AGARWAL100% (1)
- Astm C 1856 - C 1856M - 17Document4 pagesAstm C 1856 - C 1856M - 17Bambang Kardito83% (6)
- Automatic Generation Control (AGC)Document22 pagesAutomatic Generation Control (AGC)maan100% (1)
- Voltaje Stability Analysis Using Static and Dynamic ApproachsDocument13 pagesVoltaje Stability Analysis Using Static and Dynamic Approachsjaach78No ratings yet
- Solow Growth ModelDocument9 pagesSolow Growth ModelChni GalsNo ratings yet
- ELE8331: Power System Control Automatic Generation Control (AGC)Document31 pagesELE8331: Power System Control Automatic Generation Control (AGC)umarsaboNo ratings yet
- Transient Frequency Performance and Wind Penetration: J. MccalleyDocument47 pagesTransient Frequency Performance and Wind Penetration: J. Mccalleysyed Mujtaba hassanNo ratings yet
- Presentation On Power Grid InertiaDocument47 pagesPresentation On Power Grid InertiajorjijonNo ratings yet
- Power System Operation and ControlDocument15 pagesPower System Operation and ControlAbdelrahman MuadiNo ratings yet
- Automatic Generation Control: ModelingDocument34 pagesAutomatic Generation Control: ModelingSamirNo ratings yet
- Automatic Generation Control: FrequencyDocument24 pagesAutomatic Generation Control: FrequencyMohammedSaadaniHassaniNo ratings yet
- Module2 Automatic Generation ControlDocument29 pagesModule2 Automatic Generation ControlADDIS JOHNNo ratings yet
- Chapter 3 NewDocument14 pagesChapter 3 NewDhilip GMNo ratings yet
- 2021 - ESIG - Rethinking System Services With GFM Tim GreenDocument16 pages2021 - ESIG - Rethinking System Services With GFM Tim GreensusantojdNo ratings yet
- Transient Frequency Performance and Wind Penetration: J. MccalleyDocument42 pagesTransient Frequency Performance and Wind Penetration: J. Mccalley徐凤年No ratings yet
- Introduction To Power System Operation and ControlDocument24 pagesIntroduction To Power System Operation and ControlAbdelrahman MuadiNo ratings yet
- Icieeimt 2017 8116868Document5 pagesIcieeimt 2017 8116868godspower brunoNo ratings yet
- A Computer Application For Power System Control Studies: Dinis C. A. BuchoDocument10 pagesA Computer Application For Power System Control Studies: Dinis C. A. Buchoramudu sunkaraNo ratings yet
- Isochronous Load Sharing Principles For An Islanded System With Steam and Gas Turbine GeneratorsDocument8 pagesIsochronous Load Sharing Principles For An Islanded System With Steam and Gas Turbine GeneratorsAshish MishraNo ratings yet
- Power System Stability Enhancement by Designing Optimal PSS Employing Backtracking Search AlgorithmDocument8 pagesPower System Stability Enhancement by Designing Optimal PSS Employing Backtracking Search AlgorithmDiego J. AlverniaNo ratings yet
- Book 2 Vol 1Document216 pagesBook 2 Vol 1fgdfgdf100% (1)
- Ni 2020Document15 pagesNi 2020tusharshharmaNo ratings yet
- Excitation System-4th July 2020Document68 pagesExcitation System-4th July 2020Srikanth Purushothaman0% (1)
- PSOC UNIT-2 2marksDocument3 pagesPSOC UNIT-2 2marksRAJOLI GIRISAI MADHAVNo ratings yet
- Design of Optimal PID Controller For LFC and AVR in Power System Using PSODocument4 pagesDesign of Optimal PID Controller For LFC and AVR in Power System Using PSOsyed1188No ratings yet
- Of ForDocument6 pagesOf ForDhanesh SambariyaNo ratings yet
- Improved Particle Swarm Optimization Based Load Frequency Control in A Single Area Power SystemDocument4 pagesImproved Particle Swarm Optimization Based Load Frequency Control in A Single Area Power SystemMekonnen ShewaregaNo ratings yet
- Energy Conversion II: Prof. S. Shahnawaz AhmedDocument14 pagesEnergy Conversion II: Prof. S. Shahnawaz Ahmedmahamudul hasanNo ratings yet
- Jaya Algorithm Based Automatic Generation Control of Two Area Load Frequency Control With NonlinearitiesDocument11 pagesJaya Algorithm Based Automatic Generation Control of Two Area Load Frequency Control With NonlinearitiesIJRASETPublications100% (1)
- Transient Stability 2Document15 pagesTransient Stability 2yonoka aldinugraha100% (1)
- Karngala 2021Document11 pagesKarngala 2021NareshNo ratings yet
- ECEN 667 Power System StabilityDocument42 pagesECEN 667 Power System StabilityManuelNo ratings yet
- Power System Operation and Control: Mani Venkatasubramanian and Kevin TomsovicDocument7 pagesPower System Operation and Control: Mani Venkatasubramanian and Kevin TomsovicAdil ELNo ratings yet
- HVDC y Eolica - 3 PDFDocument21 pagesHVDC y Eolica - 3 PDFJorge Arturo Pulido PerezNo ratings yet
- Automatic Generation Control For Single Area Power System Using GNA Tuned PID ControllerDocument9 pagesAutomatic Generation Control For Single Area Power System Using GNA Tuned PID ControllerHamsa DeepikaNo ratings yet
- D StatcomDocument12 pagesD Statcomvelpula sukumarNo ratings yet
- JP 25Document10 pagesJP 25Mustafa AlhumayreNo ratings yet
- Sal Institute of Technology and Engineering Reserch Electrical DepartmentDocument1 pageSal Institute of Technology and Engineering Reserch Electrical DepartmentSachin ShikotraNo ratings yet
- Design Optimization For Power-Supplying The Nodes of WSNs - Master Thesis Presentation - Ioannis MandourarakisDocument51 pagesDesign Optimization For Power-Supplying The Nodes of WSNs - Master Thesis Presentation - Ioannis MandourarakisIoannis MandourarakisNo ratings yet
- JICA, Manual For Micro-Hydro Power DevelopmentDocument28 pagesJICA, Manual For Micro-Hydro Power DevelopmentRiza RamadhanNo ratings yet
- Excitation Avr Et PDFDocument90 pagesExcitation Avr Et PDFTrần Quang Tuyên100% (3)
- Experiment No - 4aDocument2 pagesExperiment No - 4aurstranger0No ratings yet
- Virtual Inertia Support in Power Systems For High Penetration of Renewables - Overview of Categorization, Comparison, and Evaluation of Control TechniquesDocument27 pagesVirtual Inertia Support in Power Systems For High Penetration of Renewables - Overview of Categorization, Comparison, and Evaluation of Control TechniquesAdinath 02No ratings yet
- Design of Control Systems: Case StudiesDocument35 pagesDesign of Control Systems: Case StudiesRaf IsmailNo ratings yet
- hvdc50696 2020 9292824Document7 pageshvdc50696 2020 9292824maynaraNo ratings yet
- L2 EH2741 Power20system20basicsDocument22 pagesL2 EH2741 Power20system20basicsTiến Bảo NguyễnNo ratings yet
- KIE 4004 Modern Power System AnalysisDocument13 pagesKIE 4004 Modern Power System AnalysisOmarRagabNo ratings yet
- Fundamental of Power System Operation and ControlDocument17 pagesFundamental of Power System Operation and ControlAbdelrahman MuadiNo ratings yet
- Voltage and Frequency Regulation of Microgrid With Battery Energy Storage SystemsDocument11 pagesVoltage and Frequency Regulation of Microgrid With Battery Energy Storage SystemsWalaa GabrNo ratings yet
- Motor Control: A DC System For Electric DriveDocument8 pagesMotor Control: A DC System For Electric DriveDanang AjiNo ratings yet
- A Novel Frequency-Changer Control Strategy Based On A Virtual Synchronous MotorDocument7 pagesA Novel Frequency-Changer Control Strategy Based On A Virtual Synchronous MotorcokroNo ratings yet
- Electricdrives 120518095011 Phpapp01Document63 pagesElectricdrives 120518095011 Phpapp01dung hoNo ratings yet
- Transient Stability: Stability Analysis of Nonlinear Systems (Eeen50100)Document72 pagesTransient Stability: Stability Analysis of Nonlinear Systems (Eeen50100)Hélio Oliveira FerrariNo ratings yet
- essntlrlbltysrvcstskfrcDL - VoltVarControl - Weaksys ERSTF JMM GE - 0612Document28 pagesessntlrlbltysrvcstskfrcDL - VoltVarControl - Weaksys ERSTF JMM GE - 0612ali_alfaNo ratings yet
- Fundamentals of Generator ProtectionDocument124 pagesFundamentals of Generator ProtectionZaks More100% (1)
- Load Frequency Control of Two Area Power System Using Pid Controller IJERTV3IS110621Document6 pagesLoad Frequency Control of Two Area Power System Using Pid Controller IJERTV3IS110621Mukesh Kumar Behera100% (1)
- Chapter 8 PDFDocument53 pagesChapter 8 PDFVishal SinghNo ratings yet
- Model Specification of Droop-Controlled, Grid-Forming Inverters - PNNL-V3Document10 pagesModel Specification of Droop-Controlled, Grid-Forming Inverters - PNNL-V3Bruno Hercílio de Andrade CatãoNo ratings yet
- Adaptive PID Controller With P&O MPPT AlgoritDocument13 pagesAdaptive PID Controller With P&O MPPT AlgoritThạch LêNo ratings yet
- A Novel Control Scheme For A Doubly-Fed Induction Wind Generator Under Unbalanced Grid Voltage ConditionsDocument38 pagesA Novel Control Scheme For A Doubly-Fed Induction Wind Generator Under Unbalanced Grid Voltage ConditionsAtabat AduduNo ratings yet
- Stability Improvement of Power System (SMIB) by Genetically Tuned Power System StabilizerDocument4 pagesStability Improvement of Power System (SMIB) by Genetically Tuned Power System StabilizererpublicationNo ratings yet
- Classical Approach to Constrained and Unconstrained Molecular DynamicsFrom EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- BS en 01301-3 1997 (En)Document6 pagesBS en 01301-3 1997 (En)Bambang KarditoNo ratings yet
- DIN 125-1 - (WWW - Nfpa.com - Co) PDFDocument4 pagesDIN 125-1 - (WWW - Nfpa.com - Co) PDFBambang KarditoNo ratings yet
- Water Treatment Process Monitoring and Evaluation-Beverly PDFDocument197 pagesWater Treatment Process Monitoring and Evaluation-Beverly PDFBambang KarditoNo ratings yet
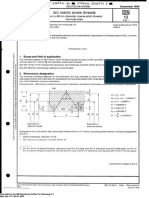
- DIN 13-1-1986, ISO Metric Screw ThreadsDocument3 pagesDIN 13-1-1986, ISO Metric Screw ThreadsBambang KarditoNo ratings yet
- ASTM C 14M - 15aDocument5 pagesASTM C 14M - 15aBambang Kardito100% (1)
- Asset Management Decision-MakingDocument13 pagesAsset Management Decision-MakingBambang Kardito100% (1)
- Health Index Transformer4Document5 pagesHealth Index Transformer4Bambang KarditoNo ratings yet
- Property Asset ManagementDocument2 pagesProperty Asset ManagementBambang KarditoNo ratings yet
- Section5 A 2 PDFDocument44 pagesSection5 A 2 PDFBambang KarditoNo ratings yet
- Buku Training Digsilent - HVDC - Exercises - eDocument9 pagesBuku Training Digsilent - HVDC - Exercises - eBambang KarditoNo ratings yet
- Proact™ Digital Speed Control System For Models I and Ii: Installation and Operation ManualDocument68 pagesProact™ Digital Speed Control System For Models I and Ii: Installation and Operation ManualKawarauNo ratings yet
- Installation and Operation Manual: 701A Digital Speed Control For Reciprocating EnginesDocument64 pagesInstallation and Operation Manual: 701A Digital Speed Control For Reciprocating EnginesJaime CalmetNo ratings yet
- 4.2 Estimation of Absolute PerformanceDocument42 pages4.2 Estimation of Absolute PerformanceAnsh GanatraNo ratings yet
- Pss MCQ McqsDocument18 pagesPss MCQ McqsMoyukh MandalNo ratings yet
- Counter-Current Washing CascadeDocument10 pagesCounter-Current Washing CascadeSimina AlungulesaNo ratings yet
- Lec-27 of ElectronicsDocument7 pagesLec-27 of Electronicssaksh014No ratings yet
- Nonequilibrium Statistical MechanicsDocument22 pagesNonequilibrium Statistical MechanicswerhmeisterNo ratings yet
- Odd PS On Mass Transfer Analysis For ChELab 2Document8 pagesOdd PS On Mass Transfer Analysis For ChELab 2Van Vesper DulliyaoNo ratings yet
- IDC AssignmentDocument12 pagesIDC AssignmentStream MarkusNo ratings yet
- Feedback Control Systems (FCS) : Lecture-18 Steady State ErrorDocument23 pagesFeedback Control Systems (FCS) : Lecture-18 Steady State Errorsviji100% (1)
- Spe 96587 MS PDFDocument6 pagesSpe 96587 MS PDFamahaminerNo ratings yet
- ConvEx Paper - The Design of High Speed Belt ConveyorsDocument11 pagesConvEx Paper - The Design of High Speed Belt Conveyorsgego2No ratings yet
- IADC/SPE 163545 Surge and Swab Effects Due To Vessel Heave in Deepwater Wells: Model Development and BenchmarkingDocument21 pagesIADC/SPE 163545 Surge and Swab Effects Due To Vessel Heave in Deepwater Wells: Model Development and BenchmarkingqjbsexNo ratings yet
- Performance Enhancement of Grid Connected Wind Energy Conversion SystemsDocument6 pagesPerformance Enhancement of Grid Connected Wind Energy Conversion Systemskanda71No ratings yet
- Co and Po MappingDocument41 pagesCo and Po MappingRajesh ChidambaramNo ratings yet
- Power Systems - Basic Concepts and Applications - Part Ii: Pdhonline Course E105 (12 PDH)Document27 pagesPower Systems - Basic Concepts and Applications - Part Ii: Pdhonline Course E105 (12 PDH)koti_sreedharNo ratings yet
- Modelling Avascular Tumour Growth: Helen M. ByrneDocument46 pagesModelling Avascular Tumour Growth: Helen M. ByrnederNo ratings yet
- Flownex ModulesBrochureDocument4 pagesFlownex ModulesBrochureSrashmiNo ratings yet
- Book 4Document197 pagesBook 4fgdfgdfNo ratings yet
- Nonintrusive Load Identification & Monitoring: Techniques and Applications For Smart MetersDocument64 pagesNonintrusive Load Identification & Monitoring: Techniques and Applications For Smart Meterstecnicos eléctricosNo ratings yet
- EET304 - M3 Ktunotes - inDocument47 pagesEET304 - M3 Ktunotes - inAkhilaNo ratings yet
- 263213.16 FL Gaseous Emergency Engine Generators - Mtu Onsite Energy - Update 01Document26 pages263213.16 FL Gaseous Emergency Engine Generators - Mtu Onsite Energy - Update 01Alberto F. Apablaza MezaNo ratings yet
- Lecture IX: Evolution: Markus M. M Obius March 15, 2003Document9 pagesLecture IX: Evolution: Markus M. M Obius March 15, 2003Prashant PatelNo ratings yet
- Clinton CarterBrownDocument20 pagesClinton CarterBrownPatriceEmNo ratings yet
- WWW - Manaresults.Co - In: (Electrical and Electronics Engineering)Document3 pagesWWW - Manaresults.Co - In: (Electrical and Electronics Engineering)Anonymous MYbA037ikNo ratings yet
- CSE 23 Dynamic Current Rating Thermal Transient ResponseDocument14 pagesCSE 23 Dynamic Current Rating Thermal Transient ResponseThi Thanh Tam NguyenNo ratings yet