Download as pdf or txt
You might also like
- IAL Chemistry SB2 Answers Topic11Document7 pagesIAL Chemistry SB2 Answers Topic11salmaNo ratings yet
- Natural Gas ProcessingDocument40 pagesNatural Gas ProcessingBalqis yasinNo ratings yet
- CE Correl 3Document44 pagesCE Correl 3Marbel PerezNo ratings yet
- PC 843 T 5046 Compressor Spare Parts PDF - Google SearchDocument2 pagesPC 843 T 5046 Compressor Spare Parts PDF - Google Searchamogmhetre0% (1)
- Navier-Stokes Equations PDFDocument3 pagesNavier-Stokes Equations PDFbobNo ratings yet
- A Study On The Design Optimization of An AUV by Using Computational Fluid Dynamic AnalysisDocument7 pagesA Study On The Design Optimization of An AUV by Using Computational Fluid Dynamic AnalysisSalma SherbazNo ratings yet
- Shape Optimization of An Autonomous Underwater Vehicle With A Ducted Propeller Using Computational Fluid Dynamics AnalysisDocument13 pagesShape Optimization of An Autonomous Underwater Vehicle With A Ducted Propeller Using Computational Fluid Dynamics AnalysishanstiwariNo ratings yet
- A Study On The Motion Analysis and Design OptimizaDocument7 pagesA Study On The Motion Analysis and Design OptimizaGaming news tadkaNo ratings yet
- Bekhit 2018 IOP Conf. Ser. - Mater. Sci. Eng. 400 042004Document12 pagesBekhit 2018 IOP Conf. Ser. - Mater. Sci. Eng. 400 042004ciksunNo ratings yet
- Calm Water Resistance Prediction of A Container Ship Using Reynolds Averaged Navier Stokes Based SolverDocument6 pagesCalm Water Resistance Prediction of A Container Ship Using Reynolds Averaged Navier Stokes Based SolverShaksNo ratings yet
- Nutts 01 2010 Duisburg PDFDocument153 pagesNutts 01 2010 Duisburg PDFAnaa ChiroşcăNo ratings yet
- The Use of Computational Fluid Dynamics To Assess The Hull Resistance of Concept Autonomous Underwater VehiclesDocument6 pagesThe Use of Computational Fluid Dynamics To Assess The Hull Resistance of Concept Autonomous Underwater VehiclesManh Dien HuynhNo ratings yet
- Comparison of Various Approaches To Numerical Simulation of Ship Resistance and PropulsionDocument8 pagesComparison of Various Approaches To Numerical Simulation of Ship Resistance and PropulsionKariem ZakiNo ratings yet
- Full - Paper - 163 - CONCRETE MATRESSESDocument18 pagesFull - Paper - 163 - CONCRETE MATRESSESrftorresrNo ratings yet
- Computational Investigation of A Hull: Keywords: Hull, Naval Architecture, CFD, Marine EngineeringDocument6 pagesComputational Investigation of A Hull: Keywords: Hull, Naval Architecture, CFD, Marine EngineeringVenkat GanapathiNo ratings yet
- CFD Approach To Modelling Hydrodynamic Characteristics of Underwater GliderDocument14 pagesCFD Approach To Modelling Hydrodynamic Characteristics of Underwater GliderAnh NgoNo ratings yet
- Parametric Design and Optimization of High-Speed RDocument13 pagesParametric Design and Optimization of High-Speed RIszysax MediaNo ratings yet
- Marine Propeller Design Using CFD ToolsDocument9 pagesMarine Propeller Design Using CFD ToolsadinaNo ratings yet
- Using CFD Software To Calculate Hydrodynamic CoefficientsDocument7 pagesUsing CFD Software To Calculate Hydrodynamic CoefficientsfauzanhanifNo ratings yet
- Numerical Investigation On The Drag Characteristics of Auv HullsDocument10 pagesNumerical Investigation On The Drag Characteristics of Auv HullsTJPRC PublicationsNo ratings yet
- Akers - A Method of Structural Load Prediction For High-Speed Planing Craft (SNAME)Document24 pagesAkers - A Method of Structural Load Prediction For High-Speed Planing Craft (SNAME)Tomislav TomoNo ratings yet
- Hydrodynamic Performance Calculation and Motion Simulation of An AUV With AppendagesDocument4 pagesHydrodynamic Performance Calculation and Motion Simulation of An AUV With AppendagesSuman SahaNo ratings yet
- Tristan Perez' Ching-Yawtzeng" Graham Goodwin'"Document6 pagesTristan Perez' Ching-Yawtzeng" Graham Goodwin'"JRNo ratings yet
- Ocean Engineering: M.J. Briggs, P.J. Kopp, A.L. Silver, W. WigginsDocument11 pagesOcean Engineering: M.J. Briggs, P.J. Kopp, A.L. Silver, W. WigginsMariana MichimotoNo ratings yet
- Fishing Vessel Hull Design and Towing Resistance Calculation by The CFD MethodsDocument4 pagesFishing Vessel Hull Design and Towing Resistance Calculation by The CFD MethodsshahjadaNo ratings yet
- United States Naval AcademyDocument20 pagesUnited States Naval AcademyShaat KumarNo ratings yet
- CatamaranS89 CompressedDocument28 pagesCatamaranS89 CompressedAndrea GaonaNo ratings yet
- Epps OpenProp JSPD ColorDocument14 pagesEpps OpenProp JSPD Colormouad jaidaneNo ratings yet
- Ansys Aqwa - An Integrated SystemDocument16 pagesAnsys Aqwa - An Integrated SystemRini MathewNo ratings yet
- DES-based Computation of The Flow Around The Darpa SuboffDocument10 pagesDES-based Computation of The Flow Around The Darpa SuboffShahbazNo ratings yet
- Karman 1929Document7 pagesKarman 1929AhmadA.SwidanNo ratings yet
- Small-Craft Power PredictionsDocument33 pagesSmall-Craft Power PredictionsbourneremembersNo ratings yet
- 03 Sname Integrated Simulation System For PropellerDocument16 pages03 Sname Integrated Simulation System For PropellerJ T Mendonça SantosNo ratings yet
- Evaluation of Resistance Increase and Speed Loss of A Ship in Wind and WavesDocument7 pagesEvaluation of Resistance Increase and Speed Loss of A Ship in Wind and WavesCarlos HernándezNo ratings yet
- Badoe Simman2014Document8 pagesBadoe Simman2014Prasad PatilNo ratings yet
- Sun, J. 2012. Hull Form DesignDocument10 pagesSun, J. 2012. Hull Form DesignManuel Esteban MercadoNo ratings yet
- CFD As A Seakeeping Tool For Ship Design: SNAK, 2011Document7 pagesCFD As A Seakeeping Tool For Ship Design: SNAK, 2011Sahil JawaNo ratings yet
- Application of Low-Re Turbulence Models For Flow Simulations Past Underwater Vehicle Hull FormsDocument14 pagesApplication of Low-Re Turbulence Models For Flow Simulations Past Underwater Vehicle Hull FormspatrickNX9420No ratings yet
- Unsteady CFD Simulation of 3D Auv Hull at Different Angles of AttackDocument13 pagesUnsteady CFD Simulation of 3D Auv Hull at Different Angles of AttackLaura LunguNo ratings yet
- A Simulator Developed For A Twin-Pod AUV, The Marport SQX-500Document6 pagesA Simulator Developed For A Twin-Pod AUV, The Marport SQX-500huy.tranvugia1305No ratings yet
- An Integrated Tool For Concept and FinalDocument15 pagesAn Integrated Tool For Concept and FinaljasserjederNo ratings yet
- Sjet 104 16-34Document20 pagesSjet 104 16-34Rakhi JadhavNo ratings yet
- Att02 P-32 ComfaaDocument13 pagesAtt02 P-32 ComfaaairpavsetNo ratings yet
- Design of Ship-Engine-Propeller Simultaneous Matching and Development of A Propeller and Engine Selecting SystemDocument10 pagesDesign of Ship-Engine-Propeller Simultaneous Matching and Development of A Propeller and Engine Selecting SystembeNo ratings yet
- Collision Avoidance For Vessels Using A Low-Cost Radar SensorDocument6 pagesCollision Avoidance For Vessels Using A Low-Cost Radar SensorPraying BumbleeNo ratings yet
- AUV Design - Shape, Drag and Practical IssuesDocument5 pagesAUV Design - Shape, Drag and Practical Issuesleiser123No ratings yet
- Intercon2021 Lau ShigyoDocument4 pagesIntercon2021 Lau ShigyoElfer MachacaNo ratings yet
- New Optimal Fishing Vessels Design Approach For Power - Speed PredictionDocument13 pagesNew Optimal Fishing Vessels Design Approach For Power - Speed Predictionheinz billNo ratings yet
- Aer2007 2211ers1 1 18Document9 pagesAer2007 2211ers1 1 18lightyears4991No ratings yet
- Design Toy Submarine Underwater VehicleDocument8 pagesDesign Toy Submarine Underwater VehicleErickson OngNo ratings yet
- Extrenal AerodynamicsDocument18 pagesExtrenal AerodynamicsLuis Rubio GómezNo ratings yet
- Numerical Simulation of Hull/propeller Interaction of Submarine in Submergence and Near Surface ConditionsDocument7 pagesNumerical Simulation of Hull/propeller Interaction of Submarine in Submergence and Near Surface ConditionsEkin Ege AltıntaşNo ratings yet
- Improving Propeller Efficiency Through Tip Loading: NOVEMBER 2014Document18 pagesImproving Propeller Efficiency Through Tip Loading: NOVEMBER 2014y_596688032No ratings yet
- Dynamic Positioning System Capability Analysis For Offshore Support VesselDocument12 pagesDynamic Positioning System Capability Analysis For Offshore Support VesselSHARATHNo ratings yet
- ICSOS-paper-Published-21Mar-2017Document15 pagesICSOS-paper-Published-21Mar-2017Syed Sadik Siddique ShouvikNo ratings yet
- Ocean Engineering: Gajanan K. Choudhary, Karan M. DoshiDocument14 pagesOcean Engineering: Gajanan K. Choudhary, Karan M. DoshiMatias Andres CanoNo ratings yet
- Modification and Analysis of Twin Screw Ship SternDocument13 pagesModification and Analysis of Twin Screw Ship SternMaciej ReichelNo ratings yet
- Mathematical Modelling of Motions and Damaged Stability of Ro-Ro Ships in The Intermediate Stages of FloodingDocument9 pagesMathematical Modelling of Motions and Damaged Stability of Ro-Ro Ships in The Intermediate Stages of FloodingFarid BerrioNo ratings yet
- Improving The Resistance of A Series 60 Vessel With A CFD CodeDocument14 pagesImproving The Resistance of A Series 60 Vessel With A CFD CodeIbrahim MadanNo ratings yet
- 61 72 PDFDocument12 pages61 72 PDFmusebladeNo ratings yet
- Mooring Design & Mooring Analysis IndiaDocument17 pagesMooring Design & Mooring Analysis IndiaMermaid coNo ratings yet
- The Verific E Drag Fo Cation of Orce and F Cfda Thrust P Analysis M Power of Methods F An Und S For Pre Derwater Edicting R Disk Ro ObotDocument13 pagesThe Verific E Drag Fo Cation of Orce and F Cfda Thrust P Analysis M Power of Methods F An Und S For Pre Derwater Edicting R Disk Ro ObotMol MolNo ratings yet
- Mesh ShipDocument7 pagesMesh ShipPranshu MalikNo ratings yet
- Drag Coeff RedDocument18 pagesDrag Coeff RedRavi Tej GNo ratings yet
- Night Hawk StandDocument2,060 pagesNight Hawk StandRavi Tej GNo ratings yet
- Nastran Aeroelastic ExampleDocument8 pagesNastran Aeroelastic ExampleRavi Tej GNo ratings yet
- Hardness of Thin Films and The Influential FactorsDocument21 pagesHardness of Thin Films and The Influential FactorsRavi Tej GNo ratings yet
- Me-662 Convective Heat and Mass TransferDocument16 pagesMe-662 Convective Heat and Mass TransferhsemargNo ratings yet
- Marangoni Effect Coffee RingDocument5 pagesMarangoni Effect Coffee RingOjasvi MongaNo ratings yet
- 2005 Modeling Bubble Growth Dynamics Expansion StarchDocument18 pages2005 Modeling Bubble Growth Dynamics Expansion Starchalcy reneNo ratings yet
- Wheel Loader 950h & 962h-Electrohydraulic SystemDocument67 pagesWheel Loader 950h & 962h-Electrohydraulic SystemMaquinaria Pesada Servis100% (3)
- مكامن ١٢Document11 pagesمكامن ١٢MohammedalwaelyNo ratings yet
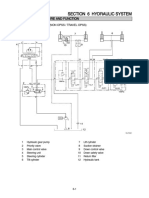
- Section 6 Hydraulic System: Group 1 Structure and FunctionDocument21 pagesSection 6 Hydraulic System: Group 1 Structure and FunctionAndré Targino100% (1)
- Aspen For Chem RXN PART 2Document50 pagesAspen For Chem RXN PART 2hakita86No ratings yet
- LXE10E-A15 LXE10E-A15A LXE10E-A15AR LXE10E-A15B: Marine Type Container Refrigeration UnitDocument70 pagesLXE10E-A15 LXE10E-A15A LXE10E-A15AR LXE10E-A15B: Marine Type Container Refrigeration UnitMuhammad NurNo ratings yet
- RPH - 1316.024 - 05 - EN - Two Page LeafletDocument2 pagesRPH - 1316.024 - 05 - EN - Two Page LeafletRuddy Fabrizio Galvez JustinianoNo ratings yet
- WCB Pumps Centrifugal C-Series Curve Instruction CentDocument4 pagesWCB Pumps Centrifugal C-Series Curve Instruction CentMuhammad Hardes Elfar WandiNo ratings yet
- Worksheet 2Document3 pagesWorksheet 2Harsh SinghNo ratings yet
- Azeeta ABS Specification For Supply and InstallationDocument15 pagesAzeeta ABS Specification For Supply and InstallationbugerkngNo ratings yet
- Conduction and Radiation Heat Transfer : Dr. Santanu Prasad DattaDocument5 pagesConduction and Radiation Heat Transfer : Dr. Santanu Prasad DattaramsastryNo ratings yet
- Tablet CompressionDocument63 pagesTablet CompressionSrinivas Dharam80% (10)
- Making Them Work: Primary-Secondary Chilled Water SystemsDocument9 pagesMaking Them Work: Primary-Secondary Chilled Water Systemspsn_kylmNo ratings yet
- Antifreeze SolutionDocument6 pagesAntifreeze SolutionMEHBOOB SHAIKHNo ratings yet
- Centrifugal Pump Operating PointDocument14 pagesCentrifugal Pump Operating PointKenan GojayevNo ratings yet
- BOQ For Yard Tap Distribution Pipe Line and FittingDocument6 pagesBOQ For Yard Tap Distribution Pipe Line and FittingsultanNo ratings yet
- Piping Support and FlexibilityDocument62 pagesPiping Support and FlexibilityAmr Metwally Anwar100% (5)
- B353-OL3-018 KBF Pres RevCDocument67 pagesB353-OL3-018 KBF Pres RevCvrajakisoriDasiNo ratings yet
- EVI (Enhance Vapour Injection) Scroll COMPRESSORSDocument10 pagesEVI (Enhance Vapour Injection) Scroll COMPRESSORSambuenaflorNo ratings yet
- Making The Grade On Safe Drinking Water For The City of Boca RatonDocument4 pagesMaking The Grade On Safe Drinking Water For The City of Boca RatonRamkiNo ratings yet
- Boiler Feed and Pump Sizing - C-B and Grundfos July 2016Document63 pagesBoiler Feed and Pump Sizing - C-B and Grundfos July 2016Jose Lorenzo Toral100% (2)
- Melt Flow Work InstructionDocument1 pageMelt Flow Work Instructionsuresh kumarNo ratings yet
- Thermax IR-CFBC Conference Rajavel - DistributionDocument32 pagesThermax IR-CFBC Conference Rajavel - Distributionchada1971100% (4)