Download as pdf or txt
You might also like
- Nice3000new Diagram PDFDocument33 pagesNice3000new Diagram PDFAsdrubal Fredy Gutierrez100% (7)
- Lecture 2-3 Machine Tools Drive SystemsDocument86 pagesLecture 2-3 Machine Tools Drive SystemsSoad SolaimanNo ratings yet
- Improving A Classroom-Based Assessment TestDocument27 pagesImproving A Classroom-Based Assessment TestKenneth Kim Villocino100% (9)
- Antilock Braking System With Abs (Automatic Braking System) Using ArduinoDocument55 pagesAntilock Braking System With Abs (Automatic Braking System) Using ArduinoRaj kumar SenNo ratings yet
- United States Patent (19) : ' Lllllill?lllllllllllllllllllili (11) Peterson (45) Date of Patent: Feb. 11, 1992Document10 pagesUnited States Patent (19) : ' Lllllill?lllllllllllllllllllili (11) Peterson (45) Date of Patent: Feb. 11, 1992PCezzzNo ratings yet
- US3082461 Brisaci PatentDocument4 pagesUS3082461 Brisaci PatentMarko DjekicNo ratings yet
- 1 OnlineDocument10 pages1 OnlineMangeshNo ratings yet
- European Patent Specification: Optimizing Guidance of Railway VehiclesDocument7 pagesEuropean Patent Specification: Optimizing Guidance of Railway VehiclesAlejandro Copete MorilloNo ratings yet
- Paper302161 2166Document6 pagesPaper302161 2166jai2009No ratings yet
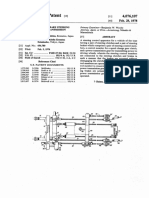
- US4076107Document7 pagesUS4076107jai2009No ratings yet
- BY (Zém $7406: C. A. FranklinDocument5 pagesBY (Zém $7406: C. A. FranklinHasitha AmarasekaraNo ratings yet
- The Control Strategy of Electronic Differential For EV With Four In-Wheel MotorsDocument6 pagesThe Control Strategy of Electronic Differential For EV With Four In-Wheel MotorsAirton Stocco de AlmeidaNo ratings yet
- SynopsisDocument12 pagesSynopsisGopal AggarwalNo ratings yet
- A Torque and Speed Coupling Hybrid DrivetraiDocument8 pagesA Torque and Speed Coupling Hybrid Drivetraiachimandr33aNo ratings yet
- Wheel Steering SystemDocument28 pagesWheel Steering SystemKshitij SharmaNo ratings yet
- Steer-By-Wire For Vehicle State Estimation and ControlDocument6 pagesSteer-By-Wire For Vehicle State Estimation and ControlvincemugnaioNo ratings yet
- Submitted To:-: Sir FaisalDocument10 pagesSubmitted To:-: Sir FaisalSaad khanNo ratings yet
- Transmission Inertia Brake Ball Ramp ActuationDocument15 pagesTransmission Inertia Brake Ball Ramp Actuationolduren53No ratings yet
- Field Oriented ControlDocument13 pagesField Oriented ControlKushagra KhamesraNo ratings yet
- Direction SystemDocument54 pagesDirection SystemGuido Mamani CharcaNo ratings yet
- Other Mechanisms: Looking For GATE Preparation Material? Join & Get Here Now!Document7 pagesOther Mechanisms: Looking For GATE Preparation Material? Join & Get Here Now!Akash SoniNo ratings yet
- A Multibody Tool For The Optimization of The SuspeDocument11 pagesA Multibody Tool For The Optimization of The SuspeMei Arief HindartoNo ratings yet
- SidecarDocument5 pagesSidecarAbkt RawlisonNo ratings yet
- Us2421190 PDFDocument6 pagesUs2421190 PDFbelchior alvaroNo ratings yet
- UNIT IV 2 MarkDocument22 pagesUNIT IV 2 MarkRama Narasimha ReddyNo ratings yet
- Steyr S MaticDocument6 pagesSteyr S Maticclcasal0% (1)
- L049062069 PDFDocument8 pagesL049062069 PDFSandra MarkivNo ratings yet
- Modeling and Optimal Shift Control of A Planetary Two-Speed TransmissionDocument16 pagesModeling and Optimal Shift Control of A Planetary Two-Speed TransmissionEduardo DelfinoNo ratings yet
- SR662Document38 pagesSR662BabulalSahuNo ratings yet
- Department of Mechanical Engineering: Lab ManualDocument57 pagesDepartment of Mechanical Engineering: Lab ManualPavaniNo ratings yet
- Balancing Procedure: PT - Armindo Jaya Mandiri Electro Mechanical WorkshopDocument8 pagesBalancing Procedure: PT - Armindo Jaya Mandiri Electro Mechanical Workshopgst ajahNo ratings yet
- Unit4 - 4 - Gear TrainsDocument38 pagesUnit4 - 4 - Gear Trainshung.oheneNo ratings yet
- Infunce of Electrical Assistance Steering System On VehicleDocument18 pagesInfunce of Electrical Assistance Steering System On VehicleAmiroNo ratings yet
- Double Acting Hacksaw Machine Using Scotch Yoke MechanismDocument32 pagesDouble Acting Hacksaw Machine Using Scotch Yoke Mechanismbalaji67% (12)
- Boite Seamless XtracDocument13 pagesBoite Seamless Xtracdudule01No ratings yet
- Brushless Servo MotorsDocument4 pagesBrushless Servo Motorschidambaram kasiNo ratings yet
- Carcopter - An Unmanned Aerial-cum-Road VehicleDocument3 pagesCarcopter - An Unmanned Aerial-cum-Road VehicleShah TufailNo ratings yet
- Repulsion MotorDocument8 pagesRepulsion MotorPravin HandeNo ratings yet
- Architecture of The Electro-Assisted Steering System - Castillo - HenryDocument6 pagesArchitecture of The Electro-Assisted Steering System - Castillo - HenryScribdTranslationsNo ratings yet
- Us2127655 PDFDocument5 pagesUs2127655 PDFbelchior alvaroNo ratings yet
- Industrial Circuits Application NoteDocument3 pagesIndustrial Circuits Application Notequechild180No ratings yet
- Design of A 3R Cobot Using Continuously Variable TransmissionsDocument6 pagesDesign of A 3R Cobot Using Continuously Variable TransmissionsPedro PrachedesNo ratings yet
- Synopsis Cms Vehicle: (With Anti Collision and Chassis Free Steering System)Document5 pagesSynopsis Cms Vehicle: (With Anti Collision and Chassis Free Steering System)Pushpendra KumarNo ratings yet
- Ackerman Angle CalculationsDocument17 pagesAckerman Angle CalculationsSiva Murugesan50% (2)
- Design and Development of Dynamic Balancing MachineDocument9 pagesDesign and Development of Dynamic Balancing MachineSibasish SahuNo ratings yet
- Bob Teal MagnaPulsion US4024421Document6 pagesBob Teal MagnaPulsion US4024421kishbudNo ratings yet
- USRE12419Document6 pagesUSRE12419nmfzkwy2rNo ratings yet
- United States Patent (191: Von Kale! Et AlDocument18 pagesUnited States Patent (191: Von Kale! Et AlJoão Paulo Canto RibeiroNo ratings yet
- Us2555702 PDFDocument9 pagesUs2555702 PDFbelchior alvaroNo ratings yet
- Wheel Torque and Speed in A Vehicle With In-Wheel MotorsDocument5 pagesWheel Torque and Speed in A Vehicle With In-Wheel Motorssuf5578No ratings yet
- Name of The Product: Patent WritingDocument8 pagesName of The Product: Patent WritingDeb PradhanNo ratings yet
- Unit 17 - 02 - Starting & ManoeuvringDocument16 pagesUnit 17 - 02 - Starting & ManoeuvringAisha ZaheerNo ratings yet
- Patent Mekanisme Crankshaft Penyeimbang Untuk Mesin Stirling 2 PistonDocument7 pagesPatent Mekanisme Crankshaft Penyeimbang Untuk Mesin Stirling 2 PistonFahrizalNo ratings yet
- Study of Steering Mechanism MechanicalDocument9 pagesStudy of Steering Mechanism MechanicalSANURASAGARNo ratings yet
- Chapter 13 - Camshaft DriveDocument10 pagesChapter 13 - Camshaft Drivenikolasthermosolutions100% (1)
- Chapter No 2 Methodology: Antireverse DifferentialDocument32 pagesChapter No 2 Methodology: Antireverse DifferentialDEEPAK CNo ratings yet
- BMW E60 Dynamic DriveDocument33 pagesBMW E60 Dynamic Driveemiliqn velikovNo ratings yet
- Repulsion Motor: ObjectivesDocument9 pagesRepulsion Motor: ObjectivesPravin HandeNo ratings yet
- Us 6388353Document10 pagesUs 6388353Feno Mena AhhadNo ratings yet
- Classical and Modern Approaches in the Theory of MechanismsFrom EverandClassical and Modern Approaches in the Theory of MechanismsNo ratings yet
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
- Devoir de Synthèse N°1 Collège Pilote - Anglais - 7ème (2015-2016) Mme Saadaoui Nesrya PDFDocument5 pagesDevoir de Synthèse N°1 Collège Pilote - Anglais - 7ème (2015-2016) Mme Saadaoui Nesrya PDFmethnani chaimaNo ratings yet
- Inductive and Deductive ReasoningDocument6 pagesInductive and Deductive Reasoningkiahjessie100% (3)
- 2007 (De Villiers) Tom & LanguageDocument21 pages2007 (De Villiers) Tom & LanguageElizabeth MendozaNo ratings yet
- March '23 Racquet Sports Industry MagazineDocument46 pagesMarch '23 Racquet Sports Industry MagazineLiya DavidovNo ratings yet
- Ideas and Methods of Turbomachinery Aerodynamics A Historical ViewDocument12 pagesIdeas and Methods of Turbomachinery Aerodynamics A Historical ViewLos MagandosNo ratings yet
- Manuals 299h Series Pressure Reducing Regulators Fisher en en 6106242 PDFDocument20 pagesManuals 299h Series Pressure Reducing Regulators Fisher en en 6106242 PDFMushfiqur Rahman0% (1)
- Important Battles of IslamDocument3 pagesImportant Battles of IslamAneesUrRehman100% (1)
- Filament SecurityDocument12 pagesFilament Securitymahdi el100% (1)
- Noelprovencalfor 19411 GranDocument14 pagesNoelprovencalfor 19411 GranwongyinlaiNo ratings yet
- USR TCP232 302 User Manual - V1.0.3.01 PDFDocument22 pagesUSR TCP232 302 User Manual - V1.0.3.01 PDFmcgeezer1No ratings yet
- Eco-Friendly PlanDocument2 pagesEco-Friendly PlanPaulisky PicazosNo ratings yet
- Analayo - A Brief Criticism of The Two Paths To Liberation Theory PDFDocument14 pagesAnalayo - A Brief Criticism of The Two Paths To Liberation Theory PDFWuNo ratings yet
- Read Online Textbook Ana Maria and The Fox Liana de La Rosa Ebook All Chapter PDFDocument22 pagesRead Online Textbook Ana Maria and The Fox Liana de La Rosa Ebook All Chapter PDFkristina.burton396100% (6)
- Solar PV Survey FormDocument6 pagesSolar PV Survey FormDigital designsNo ratings yet
- Inclusive Education Program (IEP)Document2 pagesInclusive Education Program (IEP)floradawatNo ratings yet
- Base Oils: Technical Data Sheet NEXBASE 3043Document2 pagesBase Oils: Technical Data Sheet NEXBASE 3043Axel Mahya AvichenaNo ratings yet
- PSM SeminarDocument33 pagesPSM SeminarSamarth JainNo ratings yet
- Postgraduate Prospectus For 2014 EntryDocument296 pagesPostgraduate Prospectus For 2014 EntryDaniel LieNo ratings yet
- Language PoliticsDocument20 pagesLanguage PoliticsAkshatNo ratings yet
- UntitledDocument20 pagesUntitledErica FieldNo ratings yet
- SH SingleDocument52 pagesSH SingleNivaldoNo ratings yet
- SKYPAD Pocket Firmware Instructions PDFDocument3 pagesSKYPAD Pocket Firmware Instructions PDFAbelito FloresNo ratings yet
- Aws Certification Map en Us PDFDocument1 pageAws Certification Map en Us PDFasdf2012No ratings yet
- 500004-Esperanza Is-Shs-App-Cse-2024Document40 pages500004-Esperanza Is-Shs-App-Cse-2024Iriel NadongaNo ratings yet
- Low Cost Home Automation With ESP8266 and Lightweight Protocol MQTTDocument6 pagesLow Cost Home Automation With ESP8266 and Lightweight Protocol MQTTamilcar.bodiniNo ratings yet
- Hypertension Concept MapDocument1 pageHypertension Concept Mapjyd parreñoNo ratings yet
- Answer Keys For Problem Set 3: MIT 14.04 Intermediate Microeconomic Theory Fall 2003Document4 pagesAnswer Keys For Problem Set 3: MIT 14.04 Intermediate Microeconomic Theory Fall 2003Flavio Andrés Eichin CamposNo ratings yet
- Group 3 Financial MarketsDocument17 pagesGroup 3 Financial MarketsLady Lou Ignacio LepasanaNo ratings yet