Download as docx, pdf, or txt
You might also like
- Multiple Choice Questions For Digital Signal ProcessingDocument128 pagesMultiple Choice Questions For Digital Signal Processingpriya100% (2)
- BASIC Electrotherapy PDFDocument58 pagesBASIC Electrotherapy PDFMarian Minca100% (1)
- Data Sheet WangenDocument3 pagesData Sheet Wangenahmad rudiNo ratings yet
- DSP MCQ's PDFDocument13 pagesDSP MCQ's PDFMUSHTAREEN HARLAPURNo ratings yet
- DSP MCQDocument8 pagesDSP MCQSuresh RoyNo ratings yet
- Questions On Digital Signal ProseccesingDocument16 pagesQuestions On Digital Signal ProseccesingMUSHTAREEN HARLAPURNo ratings yet
- MCQS On CEDocument24 pagesMCQS On CEparth bhardwajNo ratings yet
- DSP MCQ1Document8 pagesDSP MCQ1Bala MuruganNo ratings yet
- CS MCQ QBDocument21 pagesCS MCQ QBformyphdNo ratings yet
- Digital Signal Processing ObjectiveDocument128 pagesDigital Signal Processing ObjectiveSrinivasu RajuNo ratings yet
- Ss McqsDocument15 pagesSs McqsZeeshan TayyabNo ratings yet
- sodapdf-converted (1)Document13 pagessodapdf-converted (1)mesfin asegidNo ratings yet
- DSP Interview Questions March-2019: ANSWER: A/D ConverterDocument13 pagesDSP Interview Questions March-2019: ANSWER: A/D ConverterAnonymous jxm0WNS7QaNo ratings yet
- Signal and System McqsDocument38 pagesSignal and System McqsJaved samejoNo ratings yet
- Gate Question - ECEDocument8 pagesGate Question - ECERamesh MallaiNo ratings yet
- UNIT 3 DIGITAL COMMUNCATION R2017 MCQ FinalDocument9 pagesUNIT 3 DIGITAL COMMUNCATION R2017 MCQ FinalMuthumariNo ratings yet
- Current Affairs 2020 PDF - Latest Current Affairs 2020 PDF: MCQ On Digital Signal ProcessingDocument6 pagesCurrent Affairs 2020 PDF - Latest Current Affairs 2020 PDF: MCQ On Digital Signal ProcessingPrajwal BirwadkarNo ratings yet
- cs1&2 Answer KeyDocument18 pagescs1&2 Answer KeyAnitha BhavaniNo ratings yet
- Important MCQ - Signals and SystemsDocument15 pagesImportant MCQ - Signals and Systemsarijitlgsp0% (2)
- ANSWER: X (T) X (T +T0)Document17 pagesANSWER: X (T) X (T +T0)rameshNo ratings yet
- DSP All Mcq'sDocument46 pagesDSP All Mcq'sSamara Reddy (RA1611004010204)50% (4)
- Ss - Objective (1) - 231211 - 184644Document12 pagesSs - Objective (1) - 231211 - 184644SWATHI ECE - 039No ratings yet
- Multiple Choice Questions - Docx DSPDocument11 pagesMultiple Choice Questions - Docx DSPMaxipincoNo ratings yet
- DSP Important Questions UNIT-3, 4 &5Document3 pagesDSP Important Questions UNIT-3, 4 &5Jagadeesh PenakalapatiNo ratings yet
- VI SEM CSE Objective QuestionsDocument9 pagesVI SEM CSE Objective QuestionsHarshad jambhaleNo ratings yet
- Root Locus and Feed BackDocument12 pagesRoot Locus and Feed BackMathurthi BrahmiNo ratings yet
- Questions & Answers On Multirate Digital Signal ProcesingDocument7 pagesQuestions & Answers On Multirate Digital Signal Procesingkibrom atsbhaNo ratings yet
- MTVD 203 eDocument33 pagesMTVD 203 eMs. Bhavini KumawatNo ratings yet
- DSP MCQ PaperDocument4 pagesDSP MCQ PaperPanku RangareeNo ratings yet
- Power System Analysis Objective Questions and AnswersDocument11 pagesPower System Analysis Objective Questions and AnswersMuqthiar AliNo ratings yet
- Object Type Unit2ADocument2 pagesObject Type Unit2ASivagami PunithavathiNo ratings yet
- Multiple Choice Questions and Answers On Digital Signal Processing (Part-1)Document12 pagesMultiple Choice Questions and Answers On Digital Signal Processing (Part-1)siva86% (7)
- BHEL Electrical Model Question Papers Solved 2011 Sample Question Papers BHEL Electronics With Answers 2011Document14 pagesBHEL Electrical Model Question Papers Solved 2011 Sample Question Papers BHEL Electronics With Answers 2011Janiel Jawahar100% (1)
- Digital Communication MCQ Sanfoundry PDFDocument210 pagesDigital Communication MCQ Sanfoundry PDFRakesh VenkatesanNo ratings yet
- Control Systems MCQDocument24 pagesControl Systems MCQsundar82% (17)
- LOW Power VLSI Design Paper PESCEDocument10 pagesLOW Power VLSI Design Paper PESCEluckymanjuNo ratings yet
- Question Papers and Answer Keys PG UpdatedDocument873 pagesQuestion Papers and Answer Keys PG Updateds_samitNo ratings yet
- Cs Mcq's Mod For ConductDocument8 pagesCs Mcq's Mod For ConductYakaiahKomireNo ratings yet
- Objective Question Bank For Practice Subject - Control System Target Group-Electronics Engineering Final Year Sixth SemesterDocument9 pagesObjective Question Bank For Practice Subject - Control System Target Group-Electronics Engineering Final Year Sixth SemesterDeepika SharmaNo ratings yet
- DigiCom NotesDocument25 pagesDigiCom NotesJoseph Victor Oppus BaquialNo ratings yet
- Ee8591-Digital Signal ProcessingDocument128 pagesEe8591-Digital Signal ProcessingAkshay MalkhedeNo ratings yet
- Continuous Assessement: 2019/2020 Academic Year: Course Title: Digital Control Systems. Course Code: Eeep3201Document3 pagesContinuous Assessement: 2019/2020 Academic Year: Course Title: Digital Control Systems. Course Code: Eeep3201Danny JrNo ratings yet
- Multiple Choice Questions and Answers On Digital Communication - PRANSHI - VERMADocument74 pagesMultiple Choice Questions and Answers On Digital Communication - PRANSHI - VERMAMd Siraj UddinNo ratings yet
- Wipro Placement Paper 2010:-Aptitude TestDocument33 pagesWipro Placement Paper 2010:-Aptitude TestKarisma SyedaNo ratings yet
- Digital Communication MCQDocument1 pageDigital Communication MCQAmol Ghodake50% (2)
- Control Systems Set - 2Document11 pagesControl Systems Set - 2Akula VeerrajuNo ratings yet
- Poles and Zeros at Equally Spaced Points On The Unit Circle: Digital Signal ProcessingDocument3 pagesPoles and Zeros at Equally Spaced Points On The Unit Circle: Digital Signal ProcessingRohit SharmaNo ratings yet
- Composition ct2Document25 pagesComposition ct2Sangam MishraNo ratings yet
- DSP Objective QuestionsDocument3 pagesDSP Objective Questionsannam karthikNo ratings yet
- 2 qp2Document13 pages2 qp2JustinNo ratings yet
- Model Exit Exam Signal and System Part Two 2Document6 pagesModel Exit Exam Signal and System Part Two 2ERMIAS AmanuelNo ratings yet
- Control and Instrumentation: Contributed by Professor B.B.Paira, Director, Heritage Institute of TechnologyDocument7 pagesControl and Instrumentation: Contributed by Professor B.B.Paira, Director, Heritage Institute of TechnologyChirag ThakurNo ratings yet
- Sns DSPDocument26 pagesSns DSPSuneel KumarNo ratings yet
- DSP Unit V ObjectiveDocument4 pagesDSP Unit V Objectiveshashi dharNo ratings yet
- Btech 2009 Practice Placement TestDocument17 pagesBtech 2009 Practice Placement TestDhruv BhatnagarNo ratings yet
- Control System MCQDocument9 pagesControl System MCQAlka GoyalNo ratings yet
- Ael (12106 Ee4e)Document9 pagesAel (12106 Ee4e)nba poly polyNo ratings yet
- DSP Objective Type Type QuestionsDocument4 pagesDSP Objective Type Type QuestionsRamapriyavlsiNo ratings yet
- Question Bank Unit - V: Registers & Counters Part - A (Each Question Carries 1 Mark)Document9 pagesQuestion Bank Unit - V: Registers & Counters Part - A (Each Question Carries 1 Mark)Nithya SNo ratings yet
- Standard and Super-Resolution Bioimaging Data Analysis: A PrimerFrom EverandStandard and Super-Resolution Bioimaging Data Analysis: A PrimerNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Discrete Wavelet Transform: A Signal Processing ApproachFrom EverandDiscrete Wavelet Transform: A Signal Processing ApproachRating: 5 out of 5 stars5/5 (2)
- Signature of Bos Chairman 67Document2 pagesSignature of Bos Chairman 67Ramesh MallaiNo ratings yet
- Colour Face Recognition A Novel Recognition MethodDocument5 pagesColour Face Recognition A Novel Recognition MethodRamesh MallaiNo ratings yet
- Parallel ComputingDocument2 pagesParallel ComputingRamesh MallaiNo ratings yet
- U19EC416 DSP Lab SyllabusDocument2 pagesU19EC416 DSP Lab SyllabusRamesh MallaiNo ratings yet
- An Efficient Detection of Glaucoma andDocument6 pagesAn Efficient Detection of Glaucoma andRamesh MallaiNo ratings yet
- 1000 Digital Signal Processing MCQsDocument405 pages1000 Digital Signal Processing MCQskibrom atsbha42% (12)
- Fingerprint Identification Method For SecureDocument5 pagesFingerprint Identification Method For SecureRamesh MallaiNo ratings yet
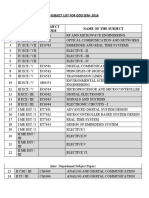
- Subject List For Odd Sem-2016 Class/ SEM Subject Code Name of The SubjectDocument3 pagesSubject List For Odd Sem-2016 Class/ SEM Subject Code Name of The SubjectRamesh MallaiNo ratings yet
- Odd Sem Subject ListDocument2 pagesOdd Sem Subject ListRamesh MallaiNo ratings yet
- Continuous Time Signals Part II Fourier TransformDocument14 pagesContinuous Time Signals Part II Fourier TransformRamesh MallaiNo ratings yet
- Vivekanandha: Institute of Engineering and Technology For WomenDocument1 pageVivekanandha: Institute of Engineering and Technology For WomenRamesh MallaiNo ratings yet
- Gate Question - ECEDocument8 pagesGate Question - ECERamesh MallaiNo ratings yet
- VVC SyllabusDocument1 pageVVC SyllabusRamesh MallaiNo ratings yet
- DSP Question BankDocument44 pagesDSP Question BankRamesh Mallai0% (1)
- Ge6757 TQM SyllabusDocument2 pagesGe6757 TQM SyllabusRamesh MallaiNo ratings yet
- Name: Vinit J Faria Roll No. 157 STD: S.Y.J.C. (Science) Div: II Elphinstone CollegeDocument9 pagesName: Vinit J Faria Roll No. 157 STD: S.Y.J.C. (Science) Div: II Elphinstone CollegeNikit FariaNo ratings yet
- E-Waste Inventory in ThailandDocument138 pagesE-Waste Inventory in ThailandxichengrenNo ratings yet
- Sepam RelayDocument46 pagesSepam RelayLawrence AlexNo ratings yet
- Updated2021.KEBOS GR11-2KVA 1800W Online Rack Mount UPS DatasheetDocument2 pagesUpdated2021.KEBOS GR11-2KVA 1800W Online Rack Mount UPS DatasheetRicardo HolleroNo ratings yet
- Torque Sensor Position Sensor Battery S1 S2 S3 S4: Tap Nominal 50/60Hz Type 1Document2 pagesTorque Sensor Position Sensor Battery S1 S2 S3 S4: Tap Nominal 50/60Hz Type 1kamala 123100% (1)
- SmartGuard QuickStartDocument89 pagesSmartGuard QuickStartJuan VazquezNo ratings yet
- Electrochem Simulation LabDocument11 pagesElectrochem Simulation LabJesseNo ratings yet
- 50A95 Statya 1 Umts GSMDocument144 pages50A95 Statya 1 Umts GSMaleksey2012No ratings yet
- Workshop 15Document73 pagesWorkshop 15AsheeshMahajanNo ratings yet
- Final Document FPCN16675Document9 pagesFinal Document FPCN16675ProbadorAutomotrizNo ratings yet
- 4 2 RectifierDocument4 pages4 2 Rectifierchandan.cj99No ratings yet
- Instruction Manual: Undervoltage, Overvoltage, Under/Overvoltage Relays BE1-27, BE1-59, BE1-27/59Document50 pagesInstruction Manual: Undervoltage, Overvoltage, Under/Overvoltage Relays BE1-27, BE1-59, BE1-27/59Junior Ramirez ReyesNo ratings yet
- Woodward Load Sharing ModuleDocument34 pagesWoodward Load Sharing Modulemsahbk0% (1)
- Megastar 155 MST6 CDocument56 pagesMegastar 155 MST6 CThomas SamuelsNo ratings yet
- W410 BAT Wireless Anemometer With AlarmsDocument3 pagesW410 BAT Wireless Anemometer With AlarmsJavier Larios ZapataNo ratings yet
- a094mMPMC Multiple Choice QuestionsDocument7 pagesa094mMPMC Multiple Choice QuestionsVenkata SureshNo ratings yet
- MainDocument2,929 pagesMainanon_172022236No ratings yet
- Lm2731 0.6/1.6-Mhz Boost Converters With 22-V Internal Fet Switch in Sot-23Document30 pagesLm2731 0.6/1.6-Mhz Boost Converters With 22-V Internal Fet Switch in Sot-23Ewerton BianchiNo ratings yet
- kst3906 Fairchild PDFDocument5 pageskst3906 Fairchild PDFAhmed Sherif CupoNo ratings yet
- C26527 BSC Physics Question PaperDocument2 pagesC26527 BSC Physics Question PaperPhysicsQuestionNo ratings yet
- Minimoog: Music IncDocument19 pagesMinimoog: Music InccarloNo ratings yet
- Power Amplifier Applications Driver Stage Amplifier ApplicationsDocument5 pagesPower Amplifier Applications Driver Stage Amplifier ApplicationsJuan CarlosNo ratings yet
- Part II" Converter Dynamics and Control!: Fundamentals of Power Electronics! Chapter 7: AC Equivalent Circuit Modeling!Document15 pagesPart II" Converter Dynamics and Control!: Fundamentals of Power Electronics! Chapter 7: AC Equivalent Circuit Modeling!Angie EstupiñanNo ratings yet
- Project 2Document2 pagesProject 2Tejas SagathiaNo ratings yet
- Manual SL7000Document101 pagesManual SL7000Juan Carlos Camacho SilesNo ratings yet
- Pc400lcse 8R PDFDocument14 pagesPc400lcse 8R PDFRieef 10No ratings yet
- MTECH ECE Jaymin-ResumeDocument4 pagesMTECH ECE Jaymin-ResumeM DasNo ratings yet