Download as pdf or txt
You might also like
- Caravan and Motorhome Electrics: the complete guideFrom EverandCaravan and Motorhome Electrics: the complete guideRating: 4.5 out of 5 stars4.5/5 (3)
- Flexible AC Transmission Systems (FACTS) and Renewable Energy Sources (RES)Document77 pagesFlexible AC Transmission Systems (FACTS) and Renewable Energy Sources (RES)Freddy TamayoNo ratings yet
- Hillslope HydrologyDocument25 pagesHillslope HydrologyLeticia Sanches BritoNo ratings yet
- MITwq22 081JF10 Lec07a PDFDocument47 pagesMITwq22 081JF10 Lec07a PDFTy PhanNo ratings yet
- Foundation & Power Distribution System-Lecture 1Document23 pagesFoundation & Power Distribution System-Lecture 1Muhammad Sadiq Syamir HasnanNo ratings yet
- What Is Medium VoltageDocument4 pagesWhat Is Medium Voltageychannel3No ratings yet
- Hyundai: Electro Electric SystemsDocument32 pagesHyundai: Electro Electric SystemsSlim Bak AliNo ratings yet
- Inspecting PV Systems PDFDocument155 pagesInspecting PV Systems PDFElectricité & Instrumentation Gassi Touil100% (1)
- Power Quality Issues of Distorted and Weak DistribDocument20 pagesPower Quality Issues of Distorted and Weak Distribvasu1984No ratings yet
- Distributed Solar Power System: 700W, 3kW, 5kW, 10kW, 20kW, 50kW and 1000kW Etc.Document4 pagesDistributed Solar Power System: 700W, 3kW, 5kW, 10kW, 20kW, 50kW and 1000kW Etc.marketingsunfix sunfixNo ratings yet
- El SweedyDocument127 pagesEl SweedykuchowNo ratings yet
- Trieb - Energy 2020 EngDocument17 pagesTrieb - Energy 2020 Engkhalilouerghi0No ratings yet
- PM Assignment 2 NotesDocument7 pagesPM Assignment 2 NotesRamawaty SukmaaNo ratings yet
- Adv With 690 Volts Over 400v PDFDocument6 pagesAdv With 690 Volts Over 400v PDFamarnath jagirdarNo ratings yet
- Solartherm PlantsDocument27 pagesSolartherm PlantsRijal PaisalNo ratings yet
- Electric Generator and Motor An OverviewDocument12 pagesElectric Generator and Motor An OverviewSalman SaifNo ratings yet
- DC Current Injection Into The Network From PV Grid InvertersDocument5 pagesDC Current Injection Into The Network From PV Grid Inverterschristian brasselNo ratings yet
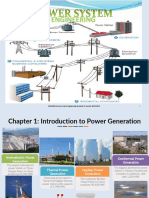
- EMJ32004 Sem 2021-2022 Chapter 1-Introduction To Power GenerationDocument80 pagesEMJ32004 Sem 2021-2022 Chapter 1-Introduction To Power GenerationMohamad azam bin ismailNo ratings yet
- Group Members:: Husnain Tahir 16-ME-108 Adnan Masih 16-ME-114 Ali Muhammad 16-ME-117 M. Haris 16-ME-120Document37 pagesGroup Members:: Husnain Tahir 16-ME-108 Adnan Masih 16-ME-114 Ali Muhammad 16-ME-117 M. Haris 16-ME-120Haris james100% (1)
- Present NoeraDocument12 pagesPresent NoeraOtuagaNo ratings yet
- Lectures - PTS - F16Document449 pagesLectures - PTS - F16Sherry KhanNo ratings yet
- EE4511 Lec 5 PDFDocument85 pagesEE4511 Lec 5 PDFOmid Karimi SadaghianiNo ratings yet
- Hyundai Electric BrochureDocument36 pagesHyundai Electric BrochurebadbenzationNo ratings yet
- HP07 Electric. DistributionDocument5 pagesHP07 Electric. DistributionhardinscNo ratings yet
- Transmission Line ParametersDocument141 pagesTransmission Line ParametershaiobNo ratings yet
- Electric SystemsDocument28 pagesElectric SystemsRaison D EtreNo ratings yet
- Technical ReportDocument9 pagesTechnical ReportJOFER REYESNo ratings yet
- Application of Emerging TechnologiesDocument49 pagesApplication of Emerging TechnologiesKunik SwaroopNo ratings yet
- Solar Thermal Power GenerationDocument101 pagesSolar Thermal Power GenerationAvnish Narula100% (5)
- Masterpower Product Catalogue - ENDocument40 pagesMasterpower Product Catalogue - ENMohamed Abd-alfattahNo ratings yet
- 765 KV TransformerDocument21 pages765 KV Transformersunil_routNo ratings yet
- NZ Electricity SectorDocument24 pagesNZ Electricity SectorrajatguptaiitrNo ratings yet
- 76854Document44 pages76854Srinivasan VairamanickamNo ratings yet
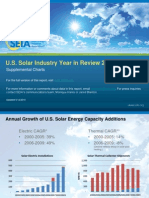
- 2009 Supplemental Charts For Solar Industry Year in ReviewDocument35 pages2009 Supplemental Charts For Solar Industry Year in ReviewTom CotterNo ratings yet
- YTPS Vol-I Part-Iii Technical Spec - Full - Spce-177-228Document52 pagesYTPS Vol-I Part-Iii Technical Spec - Full - Spce-177-228SUSOVAN BISWASNo ratings yet
- Unit5 FullDocument10 pagesUnit5 FullrishiNo ratings yet
- 2.2-KW Solar Power System: 162,500 Sub-TotalDocument1 page2.2-KW Solar Power System: 162,500 Sub-TotalMOHSIN_IIUINo ratings yet
- Om ElectDocument32 pagesOm ElectBilal AhmadNo ratings yet
- Hyundai Elec2007 1Document36 pagesHyundai Elec2007 1angel.soteldoNo ratings yet
- Cables (HT<) : Energy Estimation & Audit (15ee430)Document73 pagesCables (HT<) : Energy Estimation & Audit (15ee430)rohith mukkamalaNo ratings yet
- GisDocument319 pagesGisSaurabh Manglik100% (6)
- Chapter 1 Introduction To Electrical SystemDocument28 pagesChapter 1 Introduction To Electrical Systemvisaggan sivabalanNo ratings yet
- All in One Solar SystemDocument6 pagesAll in One Solar SystemfrenchiemanNo ratings yet
- 6.0 Section-Switchgear-SA - Rev12Document13 pages6.0 Section-Switchgear-SA - Rev12Anuj BhardwajNo ratings yet
- EE330A: Power Systems: Dr. Abheejeet MohapatraDocument16 pagesEE330A: Power Systems: Dr. Abheejeet MohapatraGovind SharmaNo ratings yet
- 5BB Multi-Crystalline Solar PV Modules 1000VDocument2 pages5BB Multi-Crystalline Solar PV Modules 1000VPeeaar Green Energy SolutionsNo ratings yet
- 2012 250W AMA Data Sheet 2.2014 PDFDocument2 pages2012 250W AMA Data Sheet 2.2014 PDFChaclis Q. RosaNo ratings yet
- Electricity Deregulation and The California Energy CrisisDocument32 pagesElectricity Deregulation and The California Energy Crisischalla nageshNo ratings yet
- 1.introduction PsaDocument22 pages1.introduction PsaRajat RaiNo ratings yet
- Chapter 1. Introduction To Power Systems: December 2019Document19 pagesChapter 1. Introduction To Power Systems: December 2019KURAKULA VIMAL KUMARNo ratings yet
- Capacitor BankDocument49 pagesCapacitor Bankishika sharma100% (1)
- Power Devices For FACTS - PDDocument23 pagesPower Devices For FACTS - PDJuan AraújoNo ratings yet
- Company Introduction (ILJIN Electric) 2009 LatestDocument43 pagesCompany Introduction (ILJIN Electric) 2009 Latestgabriel_petre2001No ratings yet
- JPS16-205 - Remote Area Power Supply SystemsDocument28 pagesJPS16-205 - Remote Area Power Supply Systemscarlosalberto.camargoNo ratings yet
- Benefits of HVDC System InterconnectionDocument20 pagesBenefits of HVDC System Interconnectiontkdrt2166No ratings yet
- Wind Solar HybridDocument21 pagesWind Solar HybridSukumar AnanthapuramNo ratings yet
- 4.0 - NEC and PV Rev 4Document77 pages4.0 - NEC and PV Rev 4Nels OdrajafNo ratings yet
- Transmission LineDocument43 pagesTransmission LineKataria Gaurav100% (3)
- GROUP No.4 - Harnam Singh Dhillon..Document11 pagesGROUP No.4 - Harnam Singh Dhillon..Harnam Singh DhillonNo ratings yet
- Wind - Generation RakeshDocument42 pagesWind - Generation RakeshAmitkumar VermaNo ratings yet
- PhotovoltaicDocument84 pagesPhotovoltaicPaulo CaldeiraNo ratings yet
- Eee 224 Power System Protection and Control PDFDocument21 pagesEee 224 Power System Protection and Control PDFadamabdullatif7309No ratings yet
- Pressuretrol l404 SeriesDocument12 pagesPressuretrol l404 SeriesFreddy TamayoNo ratings yet
- R4795A Flame Safeguard Primary Controls: S.Y. - Rev. 12-94 - ©honeywell Inc. 1994Document16 pagesR4795A Flame Safeguard Primary Controls: S.Y. - Rev. 12-94 - ©honeywell Inc. 1994Freddy TamayoNo ratings yet
- Voltage Stability (VS) Outline: - Definitions. - Voltage Collapse (Long-Term)Document31 pagesVoltage Stability (VS) Outline: - Definitions. - Voltage Collapse (Long-Term)Freddy TamayoNo ratings yet
- STATCOM Modeling For Voltage and Angle Stability Studies: Claudio A. Ca NizaresDocument20 pagesSTATCOM Modeling For Voltage and Angle Stability Studies: Claudio A. Ca NizaresFreddy TamayoNo ratings yet
- Renewable Energy Sources (RES)Document29 pagesRenewable Energy Sources (RES)Freddy TamayoNo ratings yet
- High Voltage DC (HVDC) TransmissionDocument45 pagesHigh Voltage DC (HVDC) TransmissionFreddy TamayoNo ratings yet
- Angle StabilityDocument73 pagesAngle StabilityFreddy TamayoNo ratings yet
- Capability Chart For Generator-Transformer UnitsDocument4 pagesCapability Chart For Generator-Transformer UnitsFreddy TamayoNo ratings yet
- Obtaining Diffrential Ecuation Operator Mètodo: This Is Doctor WeitnauerDocument6 pagesObtaining Diffrential Ecuation Operator Mètodo: This Is Doctor WeitnauerFreddy TamayoNo ratings yet
- EdimundiDocument3 pagesEdimundiNeyla LemaNo ratings yet
- Book 126Document12 pagesBook 126behnamatgNo ratings yet
- Cambridge O Level: Physics 5054/22Document11 pagesCambridge O Level: Physics 5054/22Lapu LapuNo ratings yet
- CY8151-Engineering Chemistry-431878289-Unit - 2 PDFDocument49 pagesCY8151-Engineering Chemistry-431878289-Unit - 2 PDFHari Prakash100% (2)
- CH#1: Experimental ChemistryDocument3 pagesCH#1: Experimental ChemistrydetNo ratings yet
- Daily - Report - 2022-08-25T101353.654Document2 pagesDaily - Report - 2022-08-25T101353.654Mine CraftNo ratings yet
- Snow Cover Mapping NepalDocument47 pagesSnow Cover Mapping Nepalkhunsanaung.gis5879No ratings yet
- AnimalsDocument4 pagesAnimalsKirstian MartinezNo ratings yet
- ConclusionDocument7 pagesConclusionEVA BUENAFENo ratings yet
- Conduction Convection RadiationDocument26 pagesConduction Convection Radiationnavketsharma6280100% (1)
- Module 1 Plant DiversityDocument262 pagesModule 1 Plant DiversityMastermind0% (1)
- JEE Main Physics SyllabusDocument5 pagesJEE Main Physics SyllabusRanjit KumarNo ratings yet
- Rammed EarthDocument17 pagesRammed EarthKaran50% (2)
- Kenneth & Kaone - Stadiums AnalysisDocument6 pagesKenneth & Kaone - Stadiums Analysisshquintin33% (3)
- Legend of The Five Rings - Emerald Empire (5th Ed) - 225Document1 pageLegend of The Five Rings - Emerald Empire (5th Ed) - 225wonkothesane42No ratings yet
- Chemistry For Sanitary EngineersDocument15 pagesChemistry For Sanitary EngineersAngel Caizel M. ManaigNo ratings yet
- VedaDocument11 pagesVedanaripooriNo ratings yet
- Chemical Potentials, Atmosphere, and Soda: Int B 3 TDocument1 pageChemical Potentials, Atmosphere, and Soda: Int B 3 TRichard ZhuNo ratings yet
- Assignment 3Document2 pagesAssignment 3HajiasifAliNo ratings yet
- AIM: To Determine The Field or In-Situ Density or Unit Weight of Soil by Core Cutter Method ApparatusDocument2 pagesAIM: To Determine The Field or In-Situ Density or Unit Weight of Soil by Core Cutter Method ApparatussunilNo ratings yet
- Lecture 22 and 23Document24 pagesLecture 22 and 23Rounak KumarNo ratings yet
- Chapter 2.4deformation of The EarthDocument19 pagesChapter 2.4deformation of The EarthLeonessa CortesNo ratings yet
- Modeling and Control of A Multiport ConverterDocument5 pagesModeling and Control of A Multiport ConverterHITESH PONNOJUNo ratings yet
- Unit 4 Checkpoint 1 AssignmentDocument4 pagesUnit 4 Checkpoint 1 AssignmentAndrew MNo ratings yet
- CM1131 - L25 - Phase Diagrams of Carbon Dioxide and Water - IVLEDocument13 pagesCM1131 - L25 - Phase Diagrams of Carbon Dioxide and Water - IVLENafeesahbmiNo ratings yet
- Operational Life Cycle Impact Assessment Weighting Factors Based On Planetary BoundariesDocument8 pagesOperational Life Cycle Impact Assessment Weighting Factors Based On Planetary BoundariesMuhammad Dzaky Alfajr DirantonaNo ratings yet
- Pretest: Environmental Science Quarter 2 - Module 3 The Ecological Levels of Organization ObjectivesDocument10 pagesPretest: Environmental Science Quarter 2 - Module 3 The Ecological Levels of Organization ObjectivesPersonalNo ratings yet
- Lecture 1Document27 pagesLecture 1Faisal NawabNo ratings yet
- Namibia Electricity Supply Demand Options March 2008 FINALDocument235 pagesNamibia Electricity Supply Demand Options March 2008 FINALVeikko212No ratings yet