Download as docx, pdf, or txt
You might also like
- Dơnload Bonded by Thorns 1st Edition Elizabeth Helen Full ChapterDocument24 pagesDơnload Bonded by Thorns 1st Edition Elizabeth Helen Full Chapterdimatedesai100% (5)
- Proposal of Robot ThesisDocument15 pagesProposal of Robot ThesisHus Forth CorrentyNo ratings yet
- Unit - I Lecture Notes PDFDocument12 pagesUnit - I Lecture Notes PDFCody LeeNo ratings yet
- CH 1-OverviewDocument58 pagesCH 1-OverviewMohamed AbdullahiNo ratings yet
- Robotic Soldering ArmDocument53 pagesRobotic Soldering Armnihalmullaa100% (4)
- Lab ManualDocument9 pagesLab ManualSahil KokitkarNo ratings yet
- UNIT I RoboticsDocument12 pagesUNIT I RoboticsJatinNo ratings yet
- ELX 321 MODULE 1 Introduction To RoboticsDocument13 pagesELX 321 MODULE 1 Introduction To RoboticsButs ButitoyNo ratings yet
- Unit I INTRODUCTION AND ROBOT KINEMATICSDocument11 pagesUnit I INTRODUCTION AND ROBOT KINEMATICShicet mechhodNo ratings yet
- IE NOTES RoboticsDocument16 pagesIE NOTES Roboticstest testNo ratings yet
- Chpter 1Document13 pagesChpter 1yusuf yuyuNo ratings yet
- 3arm Robot Mini FinalDocument49 pages3arm Robot Mini FinalWebsoft Tech-HydNo ratings yet
- Advanced Production and Process4Document21 pagesAdvanced Production and Process4christo royNo ratings yet
- Unit-I: Robotics and Automation. This Includes "Dumb" Ro Woodworking Machines, "Intelligent" WashingDocument27 pagesUnit-I: Robotics and Automation. This Includes "Dumb" Ro Woodworking Machines, "Intelligent" Washinglakshmigsr6610No ratings yet
- All UnitDocument83 pagesAll UnitShiek TiwariNo ratings yet
- Robotics NotesDocument22 pagesRobotics NotesUpendra020% (1)
- SynopsisDocument8 pagesSynopsisSahil RajputNo ratings yet
- Robotics M1 L02Document28 pagesRobotics M1 L02Abby StudiosNo ratings yet
- Robotics Lab Manual FinalDocument39 pagesRobotics Lab Manual FinalSanthosh100% (4)
- Lecture Notes: ON Advance Manufacturing &Cad/CamDocument23 pagesLecture Notes: ON Advance Manufacturing &Cad/CamDr.R.Pugazhenthi Associate Prof.No ratings yet
- Robotics Week 5-6Document10 pagesRobotics Week 5-6Mr ProductNo ratings yet
- Module 2.1 - Industrial RobotsDocument46 pagesModule 2.1 - Industrial Robotsarneey2No ratings yet
- Articulated RobotsDocument37 pagesArticulated RobotsGiovan George MendezNo ratings yet
- Lesson 1 CP Robotics RevisedDocument9 pagesLesson 1 CP Robotics RevisedUrdas, John HenryNo ratings yet
- Fundamental of Robotic ManipulatorDocument101 pagesFundamental of Robotic ManipulatorswapnakaleNo ratings yet
- Materials, Parts, Tools or Specialized Devices Through Variable Programmed Motions For The Performance of A Variety of Tasks"Document38 pagesMaterials, Parts, Tools or Specialized Devices Through Variable Programmed Motions For The Performance of A Variety of Tasks"kamalahasanmNo ratings yet
- Specification of RobotsDocument7 pagesSpecification of RobotsBilal MalikNo ratings yet
- SM 6th Sem Mech Industrial Robotics AutomationDocument39 pagesSM 6th Sem Mech Industrial Robotics AutomationSulaiman AL MajdubNo ratings yet
- Ndustrial Robotics: The Heart of Modern Manufacturing..Document54 pagesNdustrial Robotics: The Heart of Modern Manufacturing..nishanth870% (1)
- Robotics: Submitted byDocument17 pagesRobotics: Submitted bySri VijayNo ratings yet
- Introduction To Robotics Ch1Document28 pagesIntroduction To Robotics Ch1Dhaba AlemuNo ratings yet
- Theory Background of The SystemDocument10 pagesTheory Background of The SystemMoniNo ratings yet
- Nitin AssignmentDocument6 pagesNitin AssignmentNitin TantuwayNo ratings yet
- Chapter One: Pneumatic Assempling Robotic ArmDocument13 pagesChapter One: Pneumatic Assempling Robotic ArmMahmoud AbdulAzizNo ratings yet
- 6 Degrees of Freedom Robotic Arm Gripper MMDocument15 pages6 Degrees of Freedom Robotic Arm Gripper MMRobin RS BrotherNo ratings yet
- Robotics AssignmentDocument20 pagesRobotics AssignmentKashyap MauryaNo ratings yet
- Robotics Unit-1 NotesDocument10 pagesRobotics Unit-1 Notesmohanthakur8048No ratings yet
- RB5Document4 pagesRB5Ahmed anis GasmiNo ratings yet
- Oie 751 Robotics Unit 1 Q&a PDFDocument15 pagesOie 751 Robotics Unit 1 Q&a PDFMICHEL RAJ0% (1)
- University of Creative Technology, Chittagong: Future of Industrial Robots' in BangladeshDocument14 pagesUniversity of Creative Technology, Chittagong: Future of Industrial Robots' in BangladeshwagoheNo ratings yet
- Robotics TheoryDocument13 pagesRobotics TheorymahrusNo ratings yet
- RoajsbdmndDocument11 pagesRoajsbdmndAngelo AlcoranoNo ratings yet
- ROBOTICS ReportDocument20 pagesROBOTICS ReportSagar KolkarNo ratings yet
- ROBOTICSDocument13 pagesROBOTICSREY SELWYN MANALANGNo ratings yet
- CIM LECTURE FIVEDocument45 pagesCIM LECTURE FIVEsamsonwasihun2No ratings yet
- Robotic Technology Use Across Industry Automationworld 25Document25 pagesRobotic Technology Use Across Industry Automationworld 25Jonas BarbosaNo ratings yet
- Unit 1 Lecture NotesDocument12 pagesUnit 1 Lecture NotesCody LeeNo ratings yet
- Robotics (BS)Document47 pagesRobotics (BS)Anupama YadavNo ratings yet
- Cim Module 4Document21 pagesCim Module 4Shashank ShastriNo ratings yet
- Emg 2504 CN1 2017Document6 pagesEmg 2504 CN1 2017Vasda VinciNo ratings yet
- RoboticDocument12 pagesRoboticGs Su100% (2)
- Gesture Controlled Robot With Robotic ArmDocument10 pagesGesture Controlled Robot With Robotic ArmIJRASETPublicationsNo ratings yet
- Robotics Unit-1 QBDocument5 pagesRobotics Unit-1 QBveerapandianNo ratings yet
- Answer The Following Questions Through The SlidesDocument72 pagesAnswer The Following Questions Through The SlidesNathanael Aklilu EjersaNo ratings yet
- Introduction To Robotics'Document12 pagesIntroduction To Robotics'rahul bhattNo ratings yet
- Industrial Robots: Presented By: Sachin Dhopade B.E Iv/Iv PH No. 09866584839 Mechanical Engineering (Production) MVSRDocument34 pagesIndustrial Robots: Presented By: Sachin Dhopade B.E Iv/Iv PH No. 09866584839 Mechanical Engineering (Production) MVSRSachin DhopadeNo ratings yet
- Chapter 2Document100 pagesChapter 2richard tiam100% (1)
- Industrial RobotsDocument15 pagesIndustrial RobotsLW LuWee ChongNo ratings yet
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]From EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Rating: 1 out of 5 stars1/5 (1)
- Mobile Robot: Unlocking the Visionary Potential of Mobile RobotsFrom EverandMobile Robot: Unlocking the Visionary Potential of Mobile RobotsNo ratings yet
- Oil Int Combined PDFDocument19 pagesOil Int Combined PDFparthivNo ratings yet
- Guidelines For Project-Work - B.E. II-sem. Final Year StudentsDocument5 pagesGuidelines For Project-Work - B.E. II-sem. Final Year StudentsTarani TempalleNo ratings yet
- MCA-I SEM - MCA1610-Prog Lab-I-Office Automation Tools-Lab Manual PDFDocument52 pagesMCA-I SEM - MCA1610-Prog Lab-I-Office Automation Tools-Lab Manual PDFAnonymous PDGLsjN1Q50% (3)
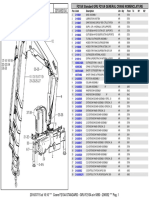
- Fassi F210a.25Document78 pagesFassi F210a.25Aleixandre GomezNo ratings yet
- Samsung SGH-F480i User ManualDocument82 pagesSamsung SGH-F480i User ManualClement DzinyembaNo ratings yet
- DSS 2011 Exhibit Guide SONYDocument124 pagesDSS 2011 Exhibit Guide SONYvb_pol@yahooNo ratings yet
- Cantilever Beam Design - AngleDocument1 pageCantilever Beam Design - Angleberylqz5878No ratings yet
- Luminous 3 en LRDocument52 pagesLuminous 3 en LRraphyjoseph100% (1)
- FPGA Based Parallel Computation Techniques For Bioinformatics ApplicationsDocument5 pagesFPGA Based Parallel Computation Techniques For Bioinformatics ApplicationsHugo ViníciusNo ratings yet
- Large-Scale Experimental Lateral Torsional Buckling Tests of Welded I-Section MembersDocument20 pagesLarge-Scale Experimental Lateral Torsional Buckling Tests of Welded I-Section Membersjackcan501No ratings yet
- Bahay KuboDocument13 pagesBahay KuboArianne Joy Quiba DullasNo ratings yet
- 0530-DWG-BSC-37-005 CRT Cube Overview Rev02Document1 page0530-DWG-BSC-37-005 CRT Cube Overview Rev02Luis Marín DíazNo ratings yet
- 3M Masking Product Catalog PDFDocument64 pages3M Masking Product Catalog PDFsanjay ukalkarNo ratings yet
- SFTY 375 Online Syllabus 0712Document8 pagesSFTY 375 Online Syllabus 0712tazz1996No ratings yet
- What Is A Compressor?Document17 pagesWhat Is A Compressor?virgolost100% (2)
- Fundamentals in Cavity PreprationDocument42 pagesFundamentals in Cavity PreprationNamrataNo ratings yet
- PP6a.gpio InterruptsDocument10 pagesPP6a.gpio InterruptsSunheang TyNo ratings yet
- TensimeterDocument4 pagesTensimeterAi Loko100% (4)
- How To Hack The Website Site Kaskus - Us Indonesia Reaver Attack United StatesDocument12 pagesHow To Hack The Website Site Kaskus - Us Indonesia Reaver Attack United Statesedurawa100% (1)
- Lab 4 WindTunnel Cylinder HandoutDocument7 pagesLab 4 WindTunnel Cylinder HandoutSteelcoverNo ratings yet
- Phân Tích Định LượngDocument30 pagesPhân Tích Định LượngVõ Thị ThưNo ratings yet
- All-New Ford Ranger: Preliminary Technical Specifications: FeaturesDocument13 pagesAll-New Ford Ranger: Preliminary Technical Specifications: FeaturesLe Van100% (1)
- Simptww PSV C208Document4 pagesSimptww PSV C208Vijay RajaindranNo ratings yet
- Two-Way SlabsDocument178 pagesTwo-Way SlabsPaul Yvelt CésaireNo ratings yet
- Iso 4586Document14 pagesIso 4586ms_macadamiaNo ratings yet
- Aalco Metals LTD Aluminium Alloy 5754 H111 Treadplate 142Document2 pagesAalco Metals LTD Aluminium Alloy 5754 H111 Treadplate 142Ramon AraujoNo ratings yet
- Chapter 27 - AnswerDocument21 pagesChapter 27 - AnswerAnonymous CuUAaRSNNo ratings yet
- S S H L: Mall-Cale Ydrodynamics in AkesDocument42 pagesS S H L: Mall-Cale Ydrodynamics in Akesbrian790No ratings yet



























































![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-1-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)