Professional Documents
Culture Documents
Systemc™: System-On-Chips (Soc) Designs
Systemc™: System-On-Chips (Soc) Designs
Uploaded by
Frankie LiuOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Systemc™: System-On-Chips (Soc) Designs
Systemc™: System-On-Chips (Soc) Designs
Uploaded by
Frankie LiuCopyright:
Available Formats
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
SystemC™
• System-on-Chips (SoC) designs
• Multiple design domains: hardware, software, analog, ...
• Multiple source components: DSPs, ASICs, IP-Cores, ...
• Hard constraints: realtime, low power, ...
• SystemC = C/C++ & HW-libraries Requirements
Architecture Matlab
• C/C++ features HW/SW
• Classes & objects Behavior
SystemC
Functional Vera
• Encapsulation - data & behavior Verification e
Sugar
System Jeda
• Operator overloading - new types & behavior Testbench
Verilog
VHDL
• Stronger typing - additional protection RTL Verilog
• Inheritance - declaration re-use Gates
• Templates - building patterns Transistors
© Peeter Ellervee systemc - 1
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Benefits of a C/C++ Based Design Flow
• Productivity aspect
• Specification between architect and implementer is executable
• High speed and high level simulation and prototyping
• Refinement, no translation into hardware (no “semantic gap”)
• System level aspect
• Tomorrow’s systems designers will be designing mostly software and less hardware !
• Co-design, co-simulation, co-verification, co-debugging, ...
• Re-use aspect
• Optimum re-use support by object-oriented techniques
• Efficient testbench re-use
• Especially C/C++ is widespread and commonly used !
© Peeter Ellervee systemc - 2
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Drawbacks of a C/C++ Based Design Flow
• C/C++ was not created to design hardware !
• C/C++ does not support
• Hardware style communication
• Signals, protocols
• Notion of time
• Clocks, time sequenced operations
• Concurrency
• Hardware is inherently concurrent, operates in parallel
• Reactivity
• Hardware is inherently reactive, responds to stimuli,
interacts with its environment (–> requires handling of exceptions)
• Hardware data types
• Bit type, bit-vector type, multi-valued logic types,
signed and unsigned integer types, fixed-point types
© Peeter Ellervee systemc - 3
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
C++
• C++ extends the C++ language in somewhat the same way that C++ extends
the C programming language
• light-weight concurrency on uniprocessor
• parallel execution on multiprocessor computers
• Peter A. Buhr, Richard A. Stroobosscher, 1992
• Execution properties:
• thread - execution of a code that occurs independently of and possible concurrently
with other executions
• execution-state - state information needed to permit independent executions
• mutual exclusion - mechanism that permits an action to be performed on a resource
without interruption by other actions on the resource
http://plg.uwaterloo.ca/~usystem/uC++.html
© Peeter Ellervee systemc - 4
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
C++ (example)
#include <uC++.h>
#include <uIOStream.h>
uMonitor ReaderWriter { void uMain::main() {
// ... ReaderWriter rw;
public: Worker *workers;
ReaderWriter() { /*...*/ }
//... workers = new Worker[MaxTask](rw);
}; delete [] workers;
uTask Worker { uCout << uAcquire <<
ReaderWriter &rw; ”successful completion” <<
void main() { endl << uRelease;
// ... }
}
public:
Worker( ReaderWriter &rw ) :
rw (rw) { }
};
© Peeter Ellervee systemc - 5
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Hardware in C/C++ – do it yourself...
#include <parallel.H>
class test_proc: public proc { **run** 200
protected: **prc2*0** 15: 1: 1
int delay,icounter; **prc1*0** 20: 1: 1
sig counter; **prc2*0** 30: 2: 2
public: **prc1*0** 40: 2: 2
test_proc(const char *nm, const int del): proc(nm) **prc2*0** 45: 3: 3
{ delay=del; icounter=0; counter=0; } **prc1*0** 60: 3: 3
void body(void) { **prc2*0** 60: 4: 4
wait(delay); **prc2*0** 75: 5: 5
icounter++; **prc1*0** 80: 4: 4
counter=counter+1; counter.Update(); **prc2*0** 90: 6: 6
fprintf(stdout,”**%s*0** %d: %d: %d\n”, **prc1*0** 100: 5: 5
name,now,icounter,(int)counter); **prc2*0** 105: 7: 7
} **prc1*0** 120: 6: 6
}; **prc2*0** 120: 8: 8
**prc2*0** 135: 9: 9
int main(const int argc, const char ** argv) **prc1*0** 140: 7: 7
{ **prc2*0** 150: 10: 10
reset_prc_tbl(); **prc1*0** 160: 8: 8
test_proc *prc1=cNew(test_proc,(”prc1”,20)); **prc2*0** 165: 11: 11
test_proc *prc2=cNew(test_proc,(”prc2”,15)); **prc1*0** 180: 9: 9
run(200); **prc2*0** 180: 12: 12
dDelete(prc1); dDelete(prc2); **prc2*0** 195: 13: 13
return 0; **prc1*0** 200: 10: 10
}
© Peeter Ellervee systemc - 6
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
... but is it worth of it?
// parallel.H
class sig { // signal // “execution engine”
private: void run(const int stop_simulation)
char const *name; {
int val,val_new; now=0;
public:
sig(const char *nm=NULL); for (now=0;now<=stop_simulation;now++) {
sig(const sig &s); // Delta-delay cycle
int operator = (const sig &s); for ( ; ; ) {
int operator = (const int v); int prc;
operator int (void); // All processes
void Update(void); // updating for (prc=0;prc<process_count;prc++) {
}; if (prc_tbl[prc].ref!=NULL) {
prc_tbl[prc].skip=false;
class proc { // process prc_tbl[prc].ref->body();
private: }
int prc; }
protected:
char *name; for (prc=0;prc<process_count;prc++)
public: { if (!prc_tbl[prc].skip) break; }
proc(const char *nm); if (prc>=process_count) break;
virtual ~proc();
virtual void body(void) = 0; // Updating all signals
bool __wait__(const int del); // ...
}; }
extern int now; // Updating simulation time (i.e. now)
#define wait(D) { if (__wait__(D)) return; } // ...
extern void run(const int stop_simulation); }
extern void reset_prc_tbl(void); }
© Peeter Ellervee systemc - 7
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Why SystemC for System Design ?
• The Gap
• Tomorrow’s systems designers will be designing mostly software and little hardware
• A software language is not capable of describing concurrency,
clocks, hardware data types, reactivity
• Requirements
• Allow hardware/software co-design and co-verification
• Fast simulation for validation and optimization
• Smooth path to hardware and software
• Support of design and architectural re-use
• http://www.accellera.org/community/systemc
• http://www.doulos.com/knowhow/systemc/
© Peeter Ellervee systemc - 8
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
What is SystemC ?
• A library of C++ classes
• Processes (for concurrency)
• Clocks (for time)
• Modules, ports, signals (for hierarchy)
• Hardware data types
• A modeling style
• ... for modeling systems consisting of multiple design domains, abstraction levels,
architectural components, real-life constraints
• A light-weight simulation kernel
• ... for high-speed cycle-accurate simulation
• http://www.accellera.org/community/systemc / IEEE Std. 1666-2011
• http://www.doulos.com/knowhow/systemc/
© Peeter Ellervee systemc - 9
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
A brief history
• Open SystemC Initiative (OSCI) – a language and modeling platform, based on C++
• September 1999 – SystemC 0.9 - first version, cycle based
• March 2000 – SystemC 1.0 - widely accessed major release
• a set of constructs for RTL and behavioral modeling
• August 2002 – SystemC 2.0 - channels & events, cleaner syntax
• enabling system-level modeling for both software and hardware implementations
• April 2005 – SystemC TLM 1.0 (Transaction Level Modeling)
• September 2005 – SystemC 2.1
• July 2006 – SystemC 2.2 (updated in March 2007)
• June 2008 – SystemC TLM 2.0.0 (library)
• July 2009 – SystemC TLM-2.0 LRM (TLM-2.0.1 library)
• March 2010 – SystemC AMS 1.0 LRM
• November 2011 – IEEE 1666–2011 standard
• July 2012 – SystemC 2.3 (TLM integrated)
• March 2013 – SystemC AMS 2.0 completed
• April 2014 – SystemC 2.3.1 (TLM integrated)
© Peeter Ellervee systemc - 10
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Benefits of a SystemC-Based Design Flow
• C/C++ based design methodology
• 1. conceptualize
• 2. simulate in C/C++
• 3. write specification document
• 4. hand over
• executable specification
• testbenches
• written specification
• 5. understand specification
• 6. refine in C/C++
• 7. validate re-using testbenches
• 8. synthesize from C/C++
© Peeter Ellervee systemc - 11
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
SystemC Key Features
• Concurrency – Sync. and async. processes
• Notion of time – Multiple clocks with arbitrary phase relation
• Data types – Bit vectors, arbitrary precision integers, ...
• v.1: arbitrary precision fixed point data types
• Communication – Signals, channels
• v.2: advanced communication protocols
• Reactivity – Watching for events
• Debug support – Waveform tracing
• Simulation support
• Support of multiple abstraction levels and iterative refinement
• Support of functional model creation
• ....
• v.3: RTOS modeling
© Peeter Ellervee systemc - 12
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Modules
• Modules are basic building blocks of a SystemC design
• A module contains processes (–> functionality)
and/or sub-modules (–> hierarchical structure)
SC_MODULE( module_name ) {
// Declaration of module ports
// Declaration of module signals
// Declaration of processes
// Declaration of sub-modules
SC_CTOR( module_name ) { // Module constructor
// Specification of process type and sensitivity
// Sub-module instantiation and port mapping
}
// Initialization of module signals
};
© Peeter Ellervee systemc - 13
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Modules
• A module correspond to a C++ class
• class data members <–> ports
• class member functions <–> processes
• class constructor <–> process generation
SC_MODULE ( module_name ) { ..... };
----------------------------------------------------
struct module_name : ::sc_core::sc_module { ..... };
SC_CTOR ( module_name ) { ..... }
---------------------------------------------------
typedef module_name SC_CURRENT_USER_MODULE;
module_name ( ::sc_core::sc_module_name ) { ..... }
© Peeter Ellervee systemc - 14
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Ports
• External interface of a module
• Passing data from and to processes / sub-modules
• Triggering of actions within the module
• A ports has a mode (direction) and a type
• mode: in, out, inout;
• type: C++ type, SystemC type, user-defined type
// input port declaration
sc_in< type > in_port_name;
// output port declaration
sc_out< type > out_port_name;
// bidirectional port declaration
sc_inout< type > inout_port_name;
• Vector port / port array:
sc_out< int > result [32];
© Peeter Ellervee systemc - 15
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Signals
• Connects a port of one module to the port of another module
• Local to a module
• Signal semantics is the same as VHDL and Verilog deferred assignment
semantics
• A signal has a type
• type: C++ type, SystemC type, user-defined type
// signal declaration
sc_signal< type > signal_name;
• Vector signal / signal array:
sc_signal< double > a[4];
• Internal data storage not by signals but by local variables
Local variable types: C++ types, SystemC types, user-defined types
© Peeter Ellervee systemc - 16
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Ports & Signals
• Port and Signal Binding
• Ports and signals to be bound need to have the same type
• A signal connects two ports
• A port is bound to one signal (port-to-signal) or to one sub-module port (port-to-port)
• Resolution
• SystemC supports resolved ports and signals
• Resolved ports/signals have 4-valued logic type (0,1,Z,X)
• Resolved ports/signals allow multiple drivers
• Resolved vector ports/vector signals
sc_in_rv< n > x; // n bits wide resolved input port
sc_signal_rv< n> y; // n bits wide resolved signal
© Peeter Ellervee systemc - 17
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Clocks
• SystemC provides a special object sc_clock
• Clocks generate timing signals to synchronize events
• Multiple clocks with arbitrary phase relations are supported
• Clock generation:
sc_clock clock_name(”label”,period,duty_ratio,offset,start_value);
sc_clock my_clk (”CLK”, 20, SC_NS, 0.5, 5, SC_NS, true);
• time units recommended for period & offset
true
false
0 5 15 25 35 45 55
• Clock binding:
my_module.clk( my_clk );
© Peeter Ellervee systemc - 18
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Data Types
• Native C/C++ types
• integer types: char, unsigned char, short, unsigned short,
int, unsigned int, long, unsigned long
• floating point types: float, double, long double
• SystemC types
• 2-value (’0’, ’1’) logic / logic vector
• 4-value (’0’, ’1’, ’Z’, ’X’) logic / logic vector
• Arbitrary sized integer (signed/unsigned)
• Fixed point types (signed/unsigned, templated/untemplated)
• User-defined types
© Peeter Ellervee systemc - 19
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
SystemC Data Types
Type Description
sc_bit 2-value single bit use bool
sc_logic 4-value single bit
sc_int 1 to 64 bit signed integer
sc_uint 1 to 64 bit unsigned integer
sc_bigint arbitrary sized signed integer
sc_biguint arbitrary sized unsigned integer
sc_bv arbitrary length 2-value vector
sc_lv arbitrary length 4-value vector
sc_fixed templated signed fixed point
sc_ufixed templated unsigned fixed point
sc_fix untemplated signed fixed point
sc_ufix untemplated unsigned fixed point
© Peeter Ellervee systemc - 20
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
sc_bit / sc_logic
• 2-value single bit type: sc_bit use of type bool recommended
• ’0’=false, ’1’=true
• 4-value single bit type: sc_logic
• ’0’=false, ’1’=true, ’X’=unknown/indeterminate value, ’Z’=high-impedance/floating value
• Features:
• Mixed use of operand types sc_bit and sc_logic
• Use of character literals for constant assignments
• sc_bit / sc_logic operators
bitwise & (and) | (or) ^ (xor) ~ (not)
assignment = &= |= ^=
equality == !=
© Peeter Ellervee systemc - 21
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
sc_int / sc_uint / sc_bigint / sc_biguint
• Fixed precision integer types
• signed: sc_int<n> (n: word length, 1 n 64)
• unsigned: sc_uint<n> (n: word length, 1 n 64)
• Arbitrary precision integer types
• signed: sc_bigint<n> (n: word length, n > 64)
• unsigned: sc_biguint<n> (n: word length, n > 64)
• Features:
• Mixed use of operand types sc_int, sc_uint, sc_bigint, sc_biguint
and C++ integer types
• Truncation and/or sign extension if required
• 2’s complement representation
© Peeter Ellervee systemc - 22
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
sc_int / sc_uint / sc_bigint / sc_biguint
• sc_int / sc_uint / sc_bigint / sc_biguint operators
bitwise & | ^ ~ >> <<
arithmetic + - * / %
assignment = += -= *= /= %= &= |= ^=
equality == !=
relational < <= > >=
auto-inc/dec ++ --
bit/part select [] range()
concatenation (,)
© Peeter Ellervee systemc - 23
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
sc_bv / sc_lv
• Arbitrary length bit vector: sc_bv<n> (n: vector length)
• Arbitrary length logic vector: sc_lv<n> (n: vector length)
• Features:
• Assignment between sc_bv and sc_lv
• Use of string literals for vector constant assignments
• Conversions between sc_bv/sc_lv and SystemC integer types
• No arithmetic operation available
• sc_bv / sc_lv
bitwise & | ^ ~ >> <<
assignment = &= |= ^=
equality == !=
bit/part select [] range()
concatenation (,)
reduction and_reduce() or_reduce() xor_reduce()
conversion to_string()
© Peeter Ellervee systemc - 24
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
sc_fixed / sc_ufixed / sc_fix / sc_ufix
• Fixed point types
• sc_fixed
templated
• sc_ufixed signed
• sc_fix unsigned
• sc_ufix untemplated
• templated - static arguments (to be known at compile time)
• untemplated - nonstatic arguments (to be configured during runtime)
• signed - 2’s complement representation
• unsigned
• Features:
• Operations performed using arbitrary precision
• Multiple quantization and overflow modes
© Peeter Ellervee systemc - 25
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
sc_fixed / sc_ufixed / sc_fix / sc_ufix
• Templated signed fixed point type: sc_fixed
• sc_fixed< wl, iwl, q_mode, o_mode, n_bits > var_name (init_val);
• Arguments:
• wl - total number of bits
• iwl - number of integer bits
• q_mode - quantization mode (optional)
• o_mode - overflow mode (optional)
• n_bits - number of bits for overflow mode (optional)
• sc_fixed_fast, sc_ufixed_fast, sc_fix_fast, sc_ufix_fast
• precision limited to 53 bits (C++ type double is used)
© Peeter Ellervee systemc - 26
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
sc_fixed / sc_ufixed / sc_fix / sc_ufix
• Example
• sc_fixed< 8, 4 > my_var (-1.75);
• ( 1.75 )10 = ( 0001.1100 )2
• 2’s complement of ( 0001.1100 )2 = ( 1110.0100 )2
• Quantization and overflow modes
Quantization Mode Overflow Mode
SC_RND Round SC_SAT Saturate
SC_RND_ZERO Round towards zero SC_SAT_ZERO Saturate to zero
SC_RND_MIN_INF Rounding towards minus infinity SC_SAT_SYM Saturate symmetrically
SC_RND_INF Rounding towards infinity SC_WRAP Wrap-around
SC_RND_CONV Convergent rounding SC_WRAP_SYM Wrap-around symmetrically
SC_TRN Truncate
SC_TRN_ZERO Truncate towards Zero
© Peeter Ellervee systemc - 27
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Operators
• Comparison: == != > >= < <=
• Arithmetic: ++ -- * / % + -
• Bitwise: ~ & | ^
• Assignment: = &= |= ^= *= /= += -= <<= >>=
• Bit selection: bit(idx) [idx]
• Range selection: range(high,low) (high,low)
• Conversion: to_double() to_int() to_int64() to_long()
to_uint() to_uint64() to_ulong() to_string()
• Testing: is_zero() is_neg() length()
• Bit reduction: and_reduce() nand_reduce() or_reduce() nor_reduce()
xor_reduce() xnor_reduce()
© Peeter Ellervee systemc - 28
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
User-Defined Data Types
• User-defined data types can be used for ports and signals
class complex {
private:
double re, im;
public:
complex () { re=0.0; im=0.0; }
complex (double r, double i) { re=r; im=i; }
void set(double r, double i) { re=r; im=i; }
double get_re() { return re; }
double get_im() { return im; }
int operator == (const complex &c) const {
if ( ( re == c.re ) && ( im == c.im() ) ) return 1;
else return 0;
}
// ...
};
sc_signal< complex > c;
© Peeter Ellervee systemc - 29
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Modules
SC_MODULE(accumulator) {
• Module is a structural entity // ports (input)
sc_in<int> In;
• helps to split complex designs
sc_in<bool> Rst;
sc_in<bool> Clk;
• Module can contain // ports (output)
• ports sc_out<int> Out;
Acc_
// local member functions
• processes void accumulate();
Out void display(ostream& = cout);
• user defined C++ functions In
// local member data
• internal member data Clk int Acc_;
• constructor Rst
// constructor
SC_CTOR(accumulator) {
• modules and signals SC_METHOD(accumulate);
sensitive_pos << Clk;
Acc_ = 0 ;
}
• Valid for Hardware, };
Firmware/Software & System
© Peeter Ellervee systemc - 30
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Module Ports
• Pass data between module-boundary and internal module-processes
• Direction: in (read), out (write), and inout (read & write)
• Type: <int> , <bool> , etc.
• Special: clock
Module Member functions
• Processes
• functions registered with the SystemC kernel
• User defined functions
• can be called within processes
© Peeter Ellervee systemc - 31
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Modules & Hierarchy
• Modules may contain sub-modules (hierarchical structure)
• In SC_MODULE:
// sub-module declaration
module_type *my_module;
• In the module constructor of SC_MODULE:
// sub-module instantiation and port mapping
SC_CTOR( module_name ) {
my_module = new module_type (”label”);
my_module -> in1 (sig1);
my_module -> in2 (sig2);
my_module -> out1 (sig3);
}
© Peeter Ellervee systemc - 32
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Modules & Hierarchy
• Module instances
• Signals
SC_MODULE(top) {
// ports
sc_in<int> In;
...
// module instances
top
accumulator A;
accumulator comparator comparator C;
Intern // signals
In A Out
sc_signal<int> Intern;
C // constructor
Th
SC_CTOR(top): A(”A”), C(”C”) {
A.In(In);
A.Out(Intern);
...
}
};
© Peeter Ellervee systemc - 33
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Modules & Hierarchy
SC_MODULE( plus ) { SC_MODULE( alu ) {
sc_in<int> i1; sc_in<int> a;
sc_in<int> i2; sc_in<int> b;
plus sc_out<int> o1; sc_in<int> c;
a i1 e ... sc_out<int> d;
o1 }; plus *p;
b i2
minus *m;
SC_MODULE( minus ) { sc_signal<int> e;
minus
sc_in<int> i1; SC_CTOR( alu ) {
i1 sc_in<int> i2; p = new plus ( ”PLUS” );
o1 d
c i2 sc_out<int> o1; p->i1 (a);
... p->i2 (b);
}; p->o1 (e);
m = new minus ( ”MINUS” );
d=(a+b)-c (*m) (e,c,d);
}
};
© Peeter Ellervee systemc - 34
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Processes
• Basic unit of concurrent execution
• Not hierarchical
• Contained inside modules
• Communication done via signals, module ports
• Encapsulates functionality
• SystemC takes care of scheduling the concurrent processes
• SystemC = Language (C++ Library) + Scheduler
© Peeter Ellervee systemc - 35
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Process Activation
• Processes have sensitivity lists
• Processes are triggered by events on sensitive signals
• Process Types
• Method (SC_METHOD)
• asynchronous block, like a combinational function
• Thread (SC_THREAD)
• asynchronous process
• Clocked Thread (SC_CTHREAD)
• synchronous process
• limited suspend/resume control
• Remote Procedure Call (RPC)
© Peeter Ellervee systemc - 36
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Process Declaration
• Declaration of member function (in SC_MODULE)
// process declaration
void my_process ();
• Instantiation (in module constructor of SC_MODULE)
// specification of process type and sensitivity
SC_CTOR( module_name ) {
SC_METHOD( my_process );
sensitive << sig1 << sig2;
}
• Definition of member function (in SC_MODULE or somewhere else)
// process specification
void module_name::my_process () {
...
}
© Peeter Ellervee systemc - 37
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Method – SC_METHOD
• Entire process executed once when a signal in its sensitivity list changes
• static sensitivity – “sensitive << i1 << i2;”
• dynamic sensitivity – “next_trigger(...);” overrides previous sensitivity list (timeout possible)
• Can not be suspended
• Local variables loose their values between successive calls
• Most similar to a usual C++ function
• Fastest
SC_MODULE( plus ) { void plus::do_plus() {
sc_in<int> i1, i2; int arg1, arg2, sum;
sc_out<int> o1;
arg1 = i1.read();
void do_plus(); arg2 = i2.read();
SC_CTOR( plus ) { sum = arg1 + arg2;
SC_METHOD( do_plus ); o1.write(sum);
sensitivity list sensitive << i1 << i2; }
}
};
© Peeter Ellervee systemc - 38
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Thread – SC_THREAD
• Infinite loop limited by event boundaries:
execution suspended by “wait()” statement(s)
• static sensitivity – “sensitive << i1 << i2;” and “wait();”
• dynamic sensitivity – “wait(conditions);” “wait_until(delay_expr)” – (timeout possible)
• subject for interpretations...
• Activated (re-activated) when any of the signals in the sensitivity list changes
• Local variables are saved (similar to static variables in C++ functions)
• Slower than method with module data members to store the ‘state’
void plus::do_plus() {
SC_MODULE( plus ) { int arg1, arg2;
sc_in<int> i1, i2; int sum;
sc_out<int> o1; while ( true ) {
arg1 = i1.read();
void do_plus(); arg2 = i2.read();
SC_CTOR( plus ) { sum = arg1 + arg2;
SC_THREAD( do_plus ); o1.write(sum);
sensitivity list sensitive << i1 << i2; wait();
} }
}; }
© Peeter Ellervee systemc - 39
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Thread – SC_THREAD
• Sensitivity
wait(time);
wait(event);
wait(event1 | event2 ...); // any of these
wait(event1 & event2 ...); // all of these
wait(timeout,event); // event with timeout
wait(timeout,event1|event2...); // any event with timeout
wait(timeout,event1&event2...); // all events with timeout
wait(); // static sensitivity
// Example
sc_event ack_event, bus_error_event;
// ...
wait(t_MAX_DELAY, ack_event | bus_error_event);
if ( timed_out() ) break; // deprecated
© Peeter Ellervee systemc - 40
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Clocked thread – SC_CTHREAD
• Particular thread: infinite loop, sensitive only to one edge of one clock
• Suspended by
• “wait()” – waiting for the next clock edge
• “wait(N)” – delay N clock cycles
• Only synchronous systems
• Slowest
void plus::do_plus() {
SC_MODULE( plus ) { int arg1, arg2;
sc_in_clk clk; int sum;
sc_in<int> i1, i2; while ( true ) {
sc_out<int> o1; arg1 = i1.read();
arg2 = i2.read();
void do_plus(); sum = arg1 + arg2;
SC_CTOR( plus ) { o1.write(sum);
SC_CTHREAD (do_plus,clk.pos()); wait();
} }
}; }
© Peeter Ellervee systemc - 41
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Processes
SC_METHOD SC_THREAD SC_CTHREAD
triggered by signal events by signal events by clock edge
infinite loop no yes yes
execution no yes yes
suspended
suspend & - wait() wait()
resume wait_until()
construct & SC_METHOD(p); SC_THREAD(p); SC_CTHREAD
sensitize (p,clock.pos());
method sensitive << s; sensitive << s;
sensitive << s.pos(); sensitive << s.pos(); SC_CTHREAD
sensitive << s.neg(); sensitive << s.neg(); (p,clock.neg());
modelling combinational sequential logic sequential logic
example logic at RT level at higher design
(hardware) (asynchronous levels
reset, etc.)
© Peeter Ellervee systemc - 42
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Remote Procedure Call – RPC
• Abstract communication and execution semantics for functional level
• Master/slave ports and processes
• Equivalent to function call but without function pointer
• Structure is key for re-use (split behavior of modules)
• RPC chain / concurrent RPC chains
SC_MODULE(M1) { SC_MODULE(M2) { SC_MODULE(top) {
sc_outmaster<int> Out; sc_inslave<int> In; sc_link_mp<int> link;
... ... ...
void process1(); void process2(); };
SC_CTOR(M1) { SC_CTOR(M2) {
SC_METHOD(process1); SC_SLAVE(process2, In);
sensitive << ...; }
} };
};
process1 process2
link
master slave
© Peeter Ellervee systemc - 43
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Time Control in SystemC
• “sc_time” – numeric magnitude + time unit
• time units – SC_SEC, SC_MS, SC_US, SC_NS, SC_PS, SC_FS
sc_time t_PERIOD (5, SC_NS)
• “sc_start()” – simulation phase = initialization + execution
• “sc_start()” , “sc_start(10000)” , “sc_start(10, SC_SEC)”
• “sc_time_stamp()” – current simulation time
• “cout << sc_time_stamp() << endl;”
• “wait()” – delaying for a certain time
• “wait(2,SC_MS);”
• Waiting and Watching
• Suspend / reactivate process execution (SC_THREAD, SC_CTHREAD)
• Suspension: wait(); / Reactivation: event on a sensitive signal
• Halt process execution until an event occurs (SC_CTHREAD only)
• do { wait(); } while ( my_bool_sig.read() != true );
© Peeter Ellervee systemc - 44
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Cycle-Accurate Simulation Scheduler
• (1) All clock signals that change their value at the current time are assigned their new
value.
• (2) All SC_METHOD / SC_THREAD processes with inputs that have changed are
executed. The entire bodies of SC_METHOD processes are executed. SC_THREAD
processes are executed until the next wait() statement suspends execution.
SC_METHOD / SC_THREAD processes are not executed in a fixed order.
• (3) All SC_CTHREAD processes that are triggered have their outputs updated and are
saved in a queue to be executed in step 5. All outputs of SC_METHOD / SC_THREAD
processes that were executed in step 2 are also updated.
• (4) Step 2 and step 3 are repeated until no signal changes its value.
• (5) All SC_CTHREAD processes that were triggered and queued in step 3 are executed.
There is no fixed execution order of these processes. Their outputs are updated at the
next active edge (when step 3 is executed), and therefore are saved internally.
• (6) Simulation time is advanced to the next clock edge and the scheduler goes back to
step 1.
© Peeter Ellervee systemc - 45
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Example #1
// David C. Black, Jack Donovan. SystemC: From the Ground Up. Springer, 2004
#include <systemc.h>
#include <iostream>
SC_MODULE (HelloWorld) { // Declare the module class
sc_in_clk iclk; // Define the clock port
SC_CTOR (HelloWorld) { // Create a constructor
SC_METHOD (main_method); // Register the main process
sensitive << iclk.neg(); // Specify clock sensitivity
dont_initialize(); // Skip initial call
}
void main_method (void)
{ std::cout << sc_time_stamp() << ” Hello world!” << std::endl; }
};
int sc_main (int argc, char *argv[]) {
const sc_time t_PERIOD(8,SC_NS); // Declare a time constant
sc_clock clk (”clk”,t_PERIOD); // Create periodic clock
HelloWorld iHelloWorld (”iHelloWorld”); // Create an instance
iHelloWorld.iclk(clk); // Connect the clock port and clock
sc_start(10,SC_NS); // Invoke the simulator
return 0;
}
© Peeter Ellervee systemc - 46
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Example #1
> g++ -I/cad/sysC/2.2/include -L/cad/sysC/2.2/lib hello.C -lsystemc
> a.out
SystemC 2.2.0 --- Nov 25 2010 16:19:37
Copyright (c) 1996-2006 by all Contributors
ALL RIGHTS RESERVED
4 ns Hello world!
• Debugging?
• VCD - Value Change Dump format
• GTKWave Electronic Waveform Viewer
• http://www.cs.manchester.ac.uk/apt/projects/tools/gtkwave/
// Create a file for waveform
sc_trace_file *trcf = sc_create_vcd_trace_file(”trace-it”);
if (trcf==NULL) cout << ”Sorry, no tracing...” << endl;
sc_trace(trcf,clk,”clk”);
sc_start(10,SC_NS); // Invoke the simulator
sc_close_vcd_trace_file(trcf);
© Peeter Ellervee systemc - 47
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Example #2 (process_1)
// header file: process_1.h // implementation file: process_1.cc
SC_MODULE( process_1 ) { #include ”systemc.h”
#include ”process_1.h”
// Ports
sc_in_clk clk; void process_1::do_process_1()
sc_in<int> a; {
sc_in<bool> ready_a; int v;
sc_out<int> b; while ( true ) {
sc_out<bool> ready_b; do wait(); while(ready_a.read()!=true);
v = a.read();
// Process functionality v += 5;
void do_process_1(); cout << ”P1: v = ” << v << endl;
b.write( v );
// Constructor
SC_CTOR( process_1 ) { ready_b.write( true );
SC_CTHREAD(do_process_1,clk.pos()); wait();
} ready_b.write( false );
}
}; }
© Peeter Ellervee systemc - 48
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Example #2 (process_2)
// header file: process_2.h // implementation file: process_2.cc
SC_MODULE( process_2 ) { #include ”systemc.h”
#include ”process_2.h”
// Ports
sc_in_clk clk; void process_2::do_process_2()
sc_in<int> a; {
sc_in<bool> ready_a; int v;
sc_out<int> b; while ( true ) {
sc_out<bool> ready_b; do wait(); while(ready_a.read()!=true);
v = a.read();
// Process functionality v += 3;
void do_process_2(); cout << ”P2: v = ” << v << endl;
b.write( v );
// Constructor
SC_CTOR( process_2 ) { ready_b.write( true );
SC_CTHREAD(do_process_2,clk.pos()); wait();
} ready_b.write( false );
}
}; }
© Peeter Ellervee systemc - 49
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Example #2 (main)
// implementation file: main.cc
#include ”systemc.h”
#include ”process_1.h” p1.b( s2 );
#include ”process_2.h” p1.ready_b( ready_s2 );
int sc_main (int ac,char *av[]) process_2 p2 ( ”P2” );
{ p2.clk( clock );
sc_report_handler::set_actions p2.a( s2 );
("/IEEE_Std_1666/deprecated", p2.ready_a( ready_s2 );
SC_DO_NOTHING); p2.b( s1 );
sc_signal<int> s1 ( ”Signal-1” ); p2.ready_b( ready_s1 );
sc_signal<int> s2 ( ”Signal-2” );
sc_signal<bool> ready_s1 ( ”Ready-1” ); s1.write(0);
sc_signal<bool> ready_s2 ( ”Ready-2” ); s2.write(0);
ready_s1.write(true);
sc_clock clock(”Clock”, 20, 0.5, 0.0); ready_s2.write(false);
process_1 p1 ( ”P1” ); sc_start(100000, SC_NS);
p1.clk( clock );
p1.a( s1 ); return 0;
p1.ready_a( ready_s1 ); }
© Peeter Ellervee systemc - 50
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
Example #2 (results)
SystemC 2.2.0 --- Nov 25 2010 16:19:37
Copyright (c) 1996-2006 by all Contributors
ALL RIGHTS RESERVED
P1: v = 5
P2: v = 8
P1: v = 13
P2: v = 16
P1: v = 21
P2: v = 24
P1: v = 29
P2: v = 32
P1: v = 37
P2: v = 40
...
P1: v = 19973
P2: v = 19976
P1: v = 19981
P2: v = 19984
P1: v = 19989
P2: v = 19992
P1: v = 19997
© Peeter Ellervee systemc - 51
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
ModelSim SE & SystemC
• From “ModelSim SE User’s Manual”
• The following modifications are needed:
• Replace “sc_main()” with an SC_MODULE, and
potentially add a process to contain any testbench code
• Replace “sc_start()” by using the “run” command in the GUI
• Remove calls to “sc_initialize()”
• Export the top level SystemC design unit(s) using the SC_MODULE_EXPORT macro
• Verify that SystemC signal, ports and modules are explicitly named to avoid port
binding and debugging errors. Disabling of automatic name binding may be needed.
• SC_CTOR (or the SC_MTI_BIND_NAME) macro is used
• use “-nonamebind” argument when compiling
© Peeter Ellervee systemc - 52
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
ModelSim SE & SystemC
SC_MODULE(mytop)
{
sc_signal<bool> mysig;
int sc_main(int argc, char* argv[]) mymod mod;
{
sc_signal<bool> mysig; SC_CTOR(mytop):
mymod mod(”mod”); mysig(”mysig”),
mod.outp(mysig); mod(”mod”)
{
sc_start(100, SC_NS); mod.outp(mysig);
} }
};
SC_MODULE_EXPORT(mytop);
© Peeter Ellervee systemc - 53
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
MUX example & GNU C/C++
// mux.h // t_mux.cpp
#include "systemc.h" #include "systemc.h"
#include "mux.h"
SC_MODULE (mux) {
int const static bit_number=8; SC_MODULE (t_mux) {
sc_in <sc_bv <bit_number> > a_in; int const static num_bits=8;
sc_in <sc_bv <bit_number> > b_in; sc_signal <sc_bv <num_bits> > t_a_in;
sc_in <sc_bit> juht; sc_signal <sc_bv <num_bits> > t_b_in;
sc_out <sc_bv <bit_number> > out_sig; sc_signal <sc_bit> t_juht;
sc_signal <sc_bv <num_bits> > t_out_sig;
SC_CTOR(mux):a_in("a_in"),b_in("b_in"), mux* mux_instance;
juht("juht"),out_sig("out_sig") { void stimulus();
cout<<"mux constructor"<<endl;
SC_METHOD( choose_out ); SC_CTOR(t_mux):t_a_in("t_a_in"),
sensitive<<juht<<a_in<<b_in; t_b_in("t_b_in"),t_juht("t_juht"),
} t_out_sig("t_out_sig") {
cout<<"t_mux constructor"<<endl;
void choose_out() { mux_instance=new mux("mux");
if (juht.read()) mux_instance->a_in(t_a_in);
out_sig.write(a_in.read()); mux_instance->b_in(t_b_in);
else out_sig.write(b_in.read()); mux_instance->juht(t_juht);
} mux_instance->out_sig(t_out_sig);
}; SC_THREAD(stimulus);
}
};
© Peeter Ellervee systemc - 54
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
MUX example & GNU C/C++
// t_mux.cpp ... // t_mux.cpp ...
void t_mux::stimulus() int sc_main(int args, char* argv[])
{ {
t_a_in.write("11111111"); t_mux testMux("t_mux");
t_b_in.write("00001111"); sc_trace_file *trcf=
t_juht.write((sc_bit)0); sc_create_vcd_trace_file("trace-it");
wait(1, SC_PS); if(trcf==NULL) cout<<"Sorry, no tracing..."<<endl;
sc_trace(trcf, testMux.t_a_in, "t_a_in");
t_juht.write((sc_bit)1); sc_trace(trcf, testMux.t_b_in, "t_b_in");
wait(10, SC_NS); sc_trace(trcf, testMux.t_juht, "t_juht");
sc_trace(trcf, testMux.t_out_sig, "t_out_sig");
t_juht.write((sc_bit)0); sc_start(40, SC_NS);
wait(10, SC_NS); sc_close_vcd_trace_file(trcf);
return 0;
t_a_in.write("11110000"); }
t_b_in.write("10101010");
t_juht.write((sc_bit)0);
wait(10, SC_NS); ----------------------------
t_juht.write((sc_bit)1); > g++ -I/cad/sysC/2.2/include -L/cad/sysC/2.2/lib
wait(); t_mux.cpp -lsystemc -o mux
} > ./mux
> gtkwave trace-it.vcd
© Peeter Ellervee systemc - 55
D e p a r t m e n t o f C o m p u t e r E n g i n e e r i n g
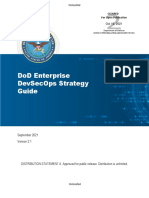
MUX example & GTKWave
© Peeter Ellervee systemc - 56
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Complete TLM-2.0 AT Example, Including Initiators, Interconnect and TargetsDocument4 pagesComplete TLM-2.0 AT Example, Including Initiators, Interconnect and TargetsFrankie LiuNo ratings yet
- Tlm2 Getting Started 2Document6 pagesTlm2 Getting Started 2Frankie LiuNo ratings yet
- Getting Started With TLM-2.0 - Part1Document6 pagesGetting Started With TLM-2.0 - Part1Frankie LiuNo ratings yet
- c++11 YoucompletemeDocument3 pagesc++11 YoucompletemeFrankie LiuNo ratings yet
- Getting Started With TLM-2.0Document5 pagesGetting Started With TLM-2.0Frankie LiuNo ratings yet
- Tlm2 Getting Started 1Document8 pagesTlm2 Getting Started 1Frankie LiuNo ratings yet
- TLM-2 0 1Document8 pagesTLM-2 0 1Frankie LiuNo ratings yet
- The TLM-2.0 Standard: John Aynsley, DoulosDocument43 pagesThe TLM-2.0 Standard: John Aynsley, DoulosFrankie LiuNo ratings yet
- 2019 DVCon India Modern SystemC.v2 - 4.3Document41 pages2019 DVCon India Modern SystemC.v2 - 4.3Frankie LiuNo ratings yet
- Systemc ExamplesDocument8 pagesSystemc ExamplesFrankie LiuNo ratings yet
- TLM-2.0 Review and FAQDocument1 pageTLM-2.0 Review and FAQFrankie LiuNo ratings yet
- Using Default .Ycm - Extra - Conf - Py, The Standard c++11 Headers Are Not Found. Issue #303 Ycm-Core - YouCompleteMeDocument10 pagesUsing Default .Ycm - Extra - Conf - Py, The Standard c++11 Headers Are Not Found. Issue #303 Ycm-Core - YouCompleteMeFrankie LiuNo ratings yet
- C++ - YouCompleteMe, Header Files - Stack OverflowDocument2 pagesC++ - YouCompleteMe, Header Files - Stack OverflowFrankie LiuNo ratings yet
- The Definitive Guide To Systemc: The Systemc LanguageDocument4 pagesThe Definitive Guide To Systemc: The Systemc LanguageFrankie LiuNo ratings yet
- Doulus SystemC TutorialDocument23 pagesDoulus SystemC TutorialFrankie LiuNo ratings yet
- Lecture3 PDFDocument12 pagesLecture3 PDFFrankie LiuNo ratings yet
- SpecC and SystemCDocument2 pagesSpecC and SystemCFrankie LiuNo ratings yet
- Lecture4 PDFDocument9 pagesLecture4 PDFFrankie LiuNo ratings yet
- Lecture5 PDFDocument14 pagesLecture5 PDFFrankie LiuNo ratings yet
- Lecture6 SystemC Intro PDFDocument25 pagesLecture6 SystemC Intro PDFFrankie LiuNo ratings yet
- The Definitive Guide To Systemc: The Systemc LanguageDocument23 pagesThe Definitive Guide To Systemc: The Systemc LanguageFrankie LiuNo ratings yet
- EECS 222: Embedded System Modeling: Lecture 9: OverviewDocument11 pagesEECS 222: Embedded System Modeling: Lecture 9: OverviewFrankie LiuNo ratings yet
- Lecture7 PDFDocument2 pagesLecture7 PDFFrankie LiuNo ratings yet
- Lecture8 PDFDocument3 pagesLecture8 PDFFrankie LiuNo ratings yet
- Lecture6 PDFDocument4 pagesLecture6 PDFFrankie LiuNo ratings yet
- Cursor Movement - How Do I Navigate To Topics in Vim's Documentation - Vi and Vim Stack ExchangeDocument5 pagesCursor Movement - How Do I Navigate To Topics in Vim's Documentation - Vi and Vim Stack ExchangeFrankie LiuNo ratings yet
- Digit Fastrack To C++ PDFDocument123 pagesDigit Fastrack To C++ PDFParas DorleNo ratings yet
- YadeDocument334 pagesYaderavee007No ratings yet
- Release Notes, UNICORN Start 1.3 - 29695178AADocument6 pagesRelease Notes, UNICORN Start 1.3 - 29695178AAsamuelNo ratings yet
- GoodElearning TOGAF Poster 43 - 150DPIDocument1 pageGoodElearning TOGAF Poster 43 - 150DPIFabian HidalgoNo ratings yet
- Ellucian ExperienceDocument2 pagesEllucian ExperienceChaituNo ratings yet
- October 2014 Intake Program Structure (CDP)Document3 pagesOctober 2014 Intake Program Structure (CDP)Ela DerarajNo ratings yet
- SRS Lecture-01Document37 pagesSRS Lecture-01Maeeda KhalidNo ratings yet
- E - Wejob Web Site: Syrian Virtual University Master in Web Science Advanced Mobile WebDocument24 pagesE - Wejob Web Site: Syrian Virtual University Master in Web Science Advanced Mobile WebAli AskarNo ratings yet
- Java Program Example - Print Table of NumberDocument4 pagesJava Program Example - Print Table of NumberSasikala AlaguvelNo ratings yet
- Oracle BPM 12c: Advanced Implementation Ed 1: DurationDocument3 pagesOracle BPM 12c: Advanced Implementation Ed 1: Durationnaveen1249No ratings yet
- Unit 2 PPLDocument56 pagesUnit 2 PPLMayank VarshneyNo ratings yet
- Ip Op DesignDocument4 pagesIp Op Design4193- SrinathNo ratings yet
- MTA 98-361 OutlineDocument3 pagesMTA 98-361 OutlineParshu RamNo ratings yet
- 09 Graph Decomposition Problems 1Document12 pages09 Graph Decomposition Problems 1Guru Prasad IyerNo ratings yet
- Your First iOS Application: GeneralDocument54 pagesYour First iOS Application: Generalvijay19882710No ratings yet
- Introduction To The Hadoop EcosystemDocument106 pagesIntroduction To The Hadoop EcosystemudNo ratings yet
- Laboratory Exercise 3Document3 pagesLaboratory Exercise 3Ed FeranilNo ratings yet
- Fifth Edition: Decision Structures and Boolean LogicDocument45 pagesFifth Edition: Decision Structures and Boolean LogicChloe LINNo ratings yet
- DoD Enterprise DevSecOps Strategy Guide - DoD-CIO - 20211019Document23 pagesDoD Enterprise DevSecOps Strategy Guide - DoD-CIO - 20211019Danut CiolpanNo ratings yet
- Upgrading The TCF (With and Without OMNI Upgrade), Rev. 1.0 - TN-000026-01-ENDocument5 pagesUpgrading The TCF (With and Without OMNI Upgrade), Rev. 1.0 - TN-000026-01-ENprabhu4u6No ratings yet
- Web Development TocDocument3 pagesWeb Development TocPalak AcharyaNo ratings yet
- Software Design PrinciplesDocument144 pagesSoftware Design PrinciplesPiscesvenNo ratings yet
- Netcool Overview PresentationDocument25 pagesNetcool Overview PresentationVishalNo ratings yet
- Introduction To AssemblyDocument22 pagesIntroduction To Assemblyjhe04100% (2)
- Lab 1: Client and Server Programs: ObjectiveDocument6 pagesLab 1: Client and Server Programs: ObjectiveDila ZamryNo ratings yet
- Class XI Java FundamentalDocument10 pagesClass XI Java Fundamentalthegamerash8852No ratings yet
- MySQL Basic SELECT Statement - Exercises, Practice, SolutionDocument45 pagesMySQL Basic SELECT Statement - Exercises, Practice, SolutionDarwin VargasNo ratings yet
- LoadTracer - A Performance Testing ToolDocument9 pagesLoadTracer - A Performance Testing ToolloadtracerNo ratings yet
- Re4b en PDFDocument1,064 pagesRe4b en PDFSuresh SaravananNo ratings yet
- Custom M CodeDocument2 pagesCustom M CodeArmando Rosas GonzalitosNo ratings yet