Download as pdf or txt
You might also like
- Dinli DL-901 Service ManualDocument136 pagesDinli DL-901 Service ManualgryzzlyNo ratings yet
- Operation and Maintenance Manual With Illustrated Parts List For Jetex6D Generator SetDocument158 pagesOperation and Maintenance Manual With Illustrated Parts List For Jetex6D Generator SetAllen AnyayahanNo ratings yet
- Taranis Quick Start GuideDocument41 pagesTaranis Quick Start GuidegepapaNo ratings yet
- 100 RDDocument4 pages100 RDMahmoud EldabahNo ratings yet
- 175 DocDocument107 pages175 DocjoeNo ratings yet
- Molded Recloser: User'S ManualDocument24 pagesMolded Recloser: User'S Manualjulitssa SarmientoNo ratings yet
- Info Iec61724 (Ed1.0) enDocument5 pagesInfo Iec61724 (Ed1.0) enIrsyad Nashirul HaqNo ratings yet
- Furyf 3 ManualDocument11 pagesFuryf 3 ManualAlbert PaulNo ratings yet
- GeneratorCB ReferenceList 20101112Document47 pagesGeneratorCB ReferenceList 20101112dsfsdffNo ratings yet
- Frsky 2.4Ghz Accst X8R Manual: Smart Port Sbus Port (Ch1-Ch16) Rssi Outport F/S Button LedDocument1 pageFrsky 2.4Ghz Accst X8R Manual: Smart Port Sbus Port (Ch1-Ch16) Rssi Outport F/S Button LedgepapaNo ratings yet
- DIY PWM To PPM Converter For 2.4GHz ReceiverDocument18 pagesDIY PWM To PPM Converter For 2.4GHz ReceivertzskojevacNo ratings yet
- Dsine MCCB CatalogueDocument86 pagesDsine MCCB CataloguePardeep Khosa100% (1)
- OpenTx FrSky Manual 130822Document42 pagesOpenTx FrSky Manual 130822gepapaNo ratings yet
- Turnigy - Flysky I6 Secret MenuDocument10 pagesTurnigy - Flysky I6 Secret MenupenguinnNo ratings yet
- Frequency Hopping Accst Technology: 2.4Ghz BandDocument19 pagesFrequency Hopping Accst Technology: 2.4Ghz BandTimothy BensonNo ratings yet
- Fs Th9x ManualDocument55 pagesFs Th9x ManualHaojiong Zhang100% (1)
- R580LA 6X4 TrukDocument2 pagesR580LA 6X4 TrukPramono TeguhNo ratings yet
- Blackmagic 3G-SDI Arduino Shield PDFDocument262 pagesBlackmagic 3G-SDI Arduino Shield PDFTariq AngelNo ratings yet
- Nowy Przewód Dvop1960 3m Mini Din 8-Pin Sub-D 9-Pin Panasonic DatasheetDocument3 pagesNowy Przewód Dvop1960 3m Mini Din 8-Pin Sub-D 9-Pin Panasonic DatasheetShekhar SrivassNo ratings yet
- 2 SK 3476Document5 pages2 SK 3476Bravo KiloNo ratings yet
- Platinum Frame and System EditionAD - 20160504Document522 pagesPlatinum Frame and System EditionAD - 20160504anyuser100% (1)
- Body Repair ManualDocument121 pagesBody Repair ManualLacatusu MirceaNo ratings yet
- Sanmotion R-3e-Ad eDocument172 pagesSanmotion R-3e-Ad eM.D. Niyaz100% (2)
- 6s Pen BMSDocument1 page6s Pen BMSDAVID ROSARIONo ratings yet
- Display Kuhn 5901034-C-En-1214Document106 pagesDisplay Kuhn 5901034-C-En-1214Piri ViruzabNo ratings yet
- Motores DCDocument52 pagesMotores DCjuan carlosNo ratings yet
- Lenze SX03Document112 pagesLenze SX03Michael CevallosNo ratings yet
- Generador HCI434D 444DDocument8 pagesGenerador HCI434D 444Dsareluis30No ratings yet
- Yamaha RX-V2067, HTR-9063, RX-A2000 PDFDocument190 pagesYamaha RX-V2067, HTR-9063, RX-A2000 PDFboroda24100% (1)
- Quick Reference TransistorDocument125 pagesQuick Reference TransistorLuis Alonso Rosero VelezNo ratings yet
- Installation Manual PDFDocument20 pagesInstallation Manual PDFAprajita KayasthaNo ratings yet
- Micro Controller 89c51Document17 pagesMicro Controller 89c51g_prashanth0704075No ratings yet
- Rev 6 SEAKEEPER 26 20HD Gyro Cable Block Diagram 08JUL20Document1 pageRev 6 SEAKEEPER 26 20HD Gyro Cable Block Diagram 08JUL20Abrham B. GMNo ratings yet
- Technical Specifications 24000btuhr Wall Mount Gree ACsDocument7 pagesTechnical Specifications 24000btuhr Wall Mount Gree ACsNelson Mukwaya100% (1)
- CC 1200Document35 pagesCC 1200César TapiaNo ratings yet
- All-In-One Solar Charger Inverter: User ManualDocument36 pagesAll-In-One Solar Charger Inverter: User Manualkyaw winNo ratings yet
- IOSK 72.5 Upto 550 KVDocument8 pagesIOSK 72.5 Upto 550 KVtransformator empatNo ratings yet
- CE65M 4096/4096 PBS (NEU: CEV65M-01460) : Absolute Rotary EncoderDocument3 pagesCE65M 4096/4096 PBS (NEU: CEV65M-01460) : Absolute Rotary EncoderjupilerNo ratings yet
- ACS604 VSD Hardware Manual (ABB)Document128 pagesACS604 VSD Hardware Manual (ABB)pandan27No ratings yet
- Chassi MPDocument100 pagesChassi MPRogério Dos AnjosNo ratings yet
- Cat426a PDFDocument90 pagesCat426a PDFJuan PenasNo ratings yet
- Basic Arduino NotesDocument11 pagesBasic Arduino NotesdanielNo ratings yet
- Tronair Rectificadores 50-60Hz PN 11B6653-1000-1010Document65 pagesTronair Rectificadores 50-60Hz PN 11B6653-1000-1010Carlos Alberto Rozo R.100% (1)
- Nokia 6300 Service Manual Doc1Document33 pagesNokia 6300 Service Manual Doc1De La Cruz KevinNo ratings yet
- Processor 521x User Manual: Messung Systems NEXGEN - 5000Document54 pagesProcessor 521x User Manual: Messung Systems NEXGEN - 5000arunkumarNo ratings yet
- Corona TreaterDocument34 pagesCorona Treaterreteng30000100% (1)
- Service Manual: Conf IdentialDocument15 pagesService Manual: Conf IdentialFrank ElizaldeNo ratings yet
- Frenic-Ehvac (F2e) User - S ManualDocument631 pagesFrenic-Ehvac (F2e) User - S ManualkarunNo ratings yet
- PM7000 PM8000Document29 pagesPM7000 PM8000Dirk LindemansNo ratings yet
- Sevcon PowerpaK (Series) Manual - With Calibrator SectionDocument51 pagesSevcon PowerpaK (Series) Manual - With Calibrator SectionKrishna KhandigeNo ratings yet
- TAD1640GE: Volvo Penta Genset EngineDocument2 pagesTAD1640GE: Volvo Penta Genset EngineRenzo zuñiga ahon100% (1)
- ABB Drives Rtac-01 Pulse Encoder Interface Module User's ManualDocument23 pagesABB Drives Rtac-01 Pulse Encoder Interface Module User's ManualJohn SimancaNo ratings yet
- Power JackDocument10 pagesPower JackcristianiacobNo ratings yet
- Pump Control Instructions MINK MV 0040-0080 C-D - EN - enDocument56 pagesPump Control Instructions MINK MV 0040-0080 C-D - EN - enEmmanuel TapiaNo ratings yet
- Gila EVT1 Schematic (.BakDocument70 pagesGila EVT1 Schematic (.BakuimNo ratings yet
- Thermo Scientific Probe Selction GuideDocument32 pagesThermo Scientific Probe Selction GuideMarco TosiniNo ratings yet
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- Data SheetDocument37 pagesData SheetRenny Amalia PratiwiNo ratings yet
- At91m55800 PDFDocument250 pagesAt91m55800 PDFLeland ChristensenNo ratings yet
- At Mega 1280Document448 pagesAt Mega 1280Craciun SergiuNo ratings yet
- AT90PWM DatasheetDocument361 pagesAT90PWM DatasheetAlaa AyedNo ratings yet
- A320 CockpitDocument4 pagesA320 CockpitKevin Wang100% (1)
- Install Windows 7 From USBDocument153 pagesInstall Windows 7 From USBravi_gm81517No ratings yet
- Schmitt TriggerDocument4 pagesSchmitt TriggerSaurabh ChakravartyNo ratings yet
- Fs-4 HD and Fs-4Pro HD: Focus FS-4 Portable DTE RecordersDocument2 pagesFs-4 HD and Fs-4Pro HD: Focus FS-4 Portable DTE RecordersPedro Camargo VargasNo ratings yet
- Overcurrent and Overload Protection Using Protective Relays: Electricity and New EnergyDocument73 pagesOvercurrent and Overload Protection Using Protective Relays: Electricity and New EnergyKaisar PrimaNo ratings yet
- Assam PWD JE Syllabus TopicsDocument5 pagesAssam PWD JE Syllabus TopicsManash Jyoti KalitaNo ratings yet
- Mikroc TutorialDocument221 pagesMikroc TutorialMuhammad Imran AminNo ratings yet
- Optical FuzeDocument7 pagesOptical FuzegattiantonioNo ratings yet
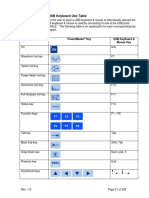
- 2.1.1 Keypad and USB Keyboard Use TableDocument20 pages2.1.1 Keypad and USB Keyboard Use TableyesidNo ratings yet
- Corrosion in Hydrochloric AcidDocument2 pagesCorrosion in Hydrochloric AcidbbmokshNo ratings yet
- Ee-116 Principles of Electrical Engineering - 2014Document96 pagesEe-116 Principles of Electrical Engineering - 2014hmxa91No ratings yet
- Digital Electronics 6Document20 pagesDigital Electronics 6Kshitij SalaveNo ratings yet
- A192-AE-W6-R, XC & Z - RC circuit-SV-PKPDocument47 pagesA192-AE-W6-R, XC & Z - RC circuit-SV-PKPMuhammad Nurazin Bin RizalNo ratings yet
- Bruel & Kjaer Environmental Noise MeasurementDocument26 pagesBruel & Kjaer Environmental Noise MeasurementAnonymous Wyb8Y1No ratings yet
- Englischer Katalog 2013 14Document72 pagesEnglischer Katalog 2013 14Christian Rodrigo Morales100% (1)
- CP400Soft Manual enDocument305 pagesCP400Soft Manual enEl HarryNo ratings yet
- Firewire and InfinibandDocument2 pagesFirewire and InfinibandKevin CheowNo ratings yet
- AS1440 Flyer EDocument2 pagesAS1440 Flyer ESohaib SaadNo ratings yet
- Hexadecimal Conversion Table Midi Channel Table: CC Chan. CC Chan. CC Chan. CCDocument1 pageHexadecimal Conversion Table Midi Channel Table: CC Chan. CC Chan. CC Chan. CCFernandoEscobedoBernuyNo ratings yet
- Difference Between PAC Hardware and PLC, DCSDocument2 pagesDifference Between PAC Hardware and PLC, DCSsuudonNo ratings yet
- Hospital FittingDocument8 pagesHospital FittingGada RobaleNo ratings yet
- Surge Arrester InstallationDocument11 pagesSurge Arrester InstallationEze UkiweNo ratings yet
- Ocb 283Document27 pagesOcb 283Roni SharmaNo ratings yet
- Operating Manual: HGM1750 Automatic Generator ModuleDocument11 pagesOperating Manual: HGM1750 Automatic Generator ModuleMiguel Angel Pavon CarbonellNo ratings yet
- GUJCET 2024 Preparation Guide PDFDocument703 pagesGUJCET 2024 Preparation Guide PDFTadi VyshnaviNo ratings yet
- Programming The 8086 8088Document336 pagesProgramming The 8086 8088kutu32100% (2)
- A Review On The Key Issues For Lithium-Ion Battery Management in Electric VehiclesDocument17 pagesA Review On The Key Issues For Lithium-Ion Battery Management in Electric VehiclesDeya OstriaNo ratings yet
- Dz77re-75k TechProdSpec01Document100 pagesDz77re-75k TechProdSpec01Rahul TripathiNo ratings yet
- Insocoat: - Electrically Insulated Rolling BearingsDocument12 pagesInsocoat: - Electrically Insulated Rolling Bearingsiyilmaz1No ratings yet