Download as pdf or txt
You might also like
- Core ML Survival GuideDocument505 pagesCore ML Survival Guidetkannan1985No ratings yet
- WaveMaster User Manual - v2.6Document111 pagesWaveMaster User Manual - v2.6Trần Danh Vũ100% (1)
- Introduction To AOSP: Building Your Own AndroidDocument26 pagesIntroduction To AOSP: Building Your Own AndroidSachin SajanNo ratings yet
- Manual Installation Guide ParaDM Document ManagementDocument113 pagesManual Installation Guide ParaDM Document ManagementArif Adhi PrasannaNo ratings yet
- Password Authentication For Web and Mobile Apps (Dmitry Chestnykh)Document95 pagesPassword Authentication For Web and Mobile Apps (Dmitry Chestnykh)Mkao MwakuniNo ratings yet
- Hello (Real) World With ROS Cheat Sheet: Filesystem Command-Line Tools Roslaunch RosserviceDocument1 pageHello (Real) World With ROS Cheat Sheet: Filesystem Command-Line Tools Roslaunch RosserviceNinaadNo ratings yet
- Omp Hands On SC08 PDFDocument153 pagesOmp Hands On SC08 PDFandres pythonNo ratings yet
- AlsaDocument19 pagesAlsaDiego ZavalaNo ratings yet
- Family Tree of Dacquel-Macabeo (Revised)Document39 pagesFamily Tree of Dacquel-Macabeo (Revised)Jimmy Andang100% (1)
- CV 1Document4 pagesCV 1Fa DiNo ratings yet
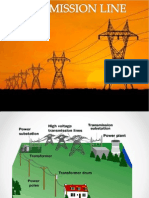
- Transmission Line PresentationDocument55 pagesTransmission Line PresentationAshwani Dogra89% (9)
- ROS-Introduction, ROS Graph ConceptsDocument21 pagesROS-Introduction, ROS Graph Conceptsmarco gilibertiNo ratings yet
- Welcome To ROS TopicsDocument2 pagesWelcome To ROS TopicsVan Tung HaNo ratings yet
- Basic Operating Tutorial of Robot Operating SystemDocument40 pagesBasic Operating Tutorial of Robot Operating SystemJose De Jesus MoyaNo ratings yet
- Introduction To ROS, CAMBADA@Home Use Case: Eurico PedrosaDocument20 pagesIntroduction To ROS, CAMBADA@Home Use Case: Eurico PedrosaefpmoNo ratings yet
- Lab 1 ROS Intro LAB 02 PDFDocument33 pagesLab 1 ROS Intro LAB 02 PDFNadeya Nusrat AnannaNo ratings yet
- Cloud ComputingDocument63 pagesCloud ComputingafjeieNo ratings yet
- Architecting With Google Cloud PlatformDocument1 pageArchitecting With Google Cloud PlatformhansNo ratings yet
- Cloud BigtableDocument1 pageCloud BigtabledheerajNo ratings yet
- Systemd RajeshDocument31 pagesSystemd RajeshRajesh ReddyNo ratings yet
- HAL Interface Definition Language or HIDLDocument9 pagesHAL Interface Definition Language or HIDLSanjay Patel100% (1)
- Talk 8 AndroidArc - Binder PDFDocument29 pagesTalk 8 AndroidArc - Binder PDFDaniel Sánchez De MarcosNo ratings yet
- RTOS SpecificationDocument15 pagesRTOS SpecificationKvks SatishNo ratings yet
- ROS Cheat SheetDocument6 pagesROS Cheat SheetMehmet Can KızılkayaNo ratings yet
- 04 ROS ActionsDocument20 pages04 ROS ActionsArjun MeghanathanNo ratings yet
- How To Use Winusb To Communicate With A Usb Device: March 9, 2010Document25 pagesHow To Use Winusb To Communicate With A Usb Device: March 9, 2010piffle2No ratings yet
- RTOS QuestionsDocument18 pagesRTOS Questionsvijay_mane2001No ratings yet
- Linear Algebra and GamingDocument8 pagesLinear Algebra and GamingjuanNo ratings yet
- Linux Perf ExamplesDocument76 pagesLinux Perf ExamplespereczkesNo ratings yet
- Linux Applications Presentation For The Video ConferenceDocument24 pagesLinux Applications Presentation For The Video ConferencevaraprasadpgNo ratings yet
- Sigmod278 SilbersteinDocument12 pagesSigmod278 SilbersteinDmytro ShteflyukNo ratings yet
- Petalinux Tutorial+Demo: For Avnet Zynq ZedboardDocument12 pagesPetalinux Tutorial+Demo: For Avnet Zynq ZedboardKarthik KichuNo ratings yet
- Linux Kernel PrimerDocument540 pagesLinux Kernel PrimerKalimuthu VelappanNo ratings yet
- GCP Products 4 Words or Less 2017-10-25Document1 pageGCP Products 4 Words or Less 2017-10-25linkNo ratings yet
- 08 Robot Sensor MotorDocument29 pages08 Robot Sensor MotoraDun iDeiNo ratings yet
- IEC 62439-3.5 HSR KirrmannDocument52 pagesIEC 62439-3.5 HSR KirrmannGaston Marcelo DiazNo ratings yet
- Linux™ Basic OverviewDocument37 pagesLinux™ Basic OverviewrejnanNo ratings yet
- Message Distributed SystemDocument57 pagesMessage Distributed SystemJagan YallaNo ratings yet
- HDL Based DesignDocument7 pagesHDL Based DesignSriramamurthy GurugubelliNo ratings yet
- Porting GuideDocument4 pagesPorting Guideboot_sectorzNo ratings yet
- Single Area OSPF SlidesDocument84 pagesSingle Area OSPF SlidesBraveNTG100% (1)
- FFMPEG BookDocument12 pagesFFMPEG Bookyhnmju0% (2)
- Design Patterns From Zero To HeroDocument46 pagesDesign Patterns From Zero To Heroads adsNo ratings yet
- BitBake User ManualDocument68 pagesBitBake User ManualSajjad AhmedNo ratings yet
- GoF Design Patterns Reloaded With Java8Document93 pagesGoF Design Patterns Reloaded With Java8RadekNo ratings yet
- Big Data Technology StackDocument12 pagesBig Data Technology StackKhalid ImranNo ratings yet
- System On ChipDocument12 pagesSystem On Chipimcoolsha999No ratings yet
- How Can You Avoid The C C++ Traps and PitfallsDocument5 pagesHow Can You Avoid The C C++ Traps and Pitfallsmrme44No ratings yet
- Basics of Embedded LinuxDocument55 pagesBasics of Embedded Linuxvansi84No ratings yet
- AOSP On New DeivceDocument54 pagesAOSP On New DeivceisumanthgNo ratings yet
- Hector SLAM USAR Kohlbrecher RRSS Graz 2012Document39 pagesHector SLAM USAR Kohlbrecher RRSS Graz 2012Ћирка ФејзбуџаркаNo ratings yet
- Transfer Function TF ROSDocument8 pagesTransfer Function TF ROSSyed Abdul Haseeb AhmedNo ratings yet
- RTOS Application Design - Embedded Software Design - A Practical Approach To Architecture, Processes, and Coding TechniquesDocument32 pagesRTOS Application Design - Embedded Software Design - A Practical Approach To Architecture, Processes, and Coding TechniquesamiteshanandNo ratings yet
- 06 ROS ToolsDocument41 pages06 ROS ToolsaDun iDeiNo ratings yet
- Jetpack Compose 1.6 Essentials: Developing Android Apps with Jetpack Compose 1.6, Android Studio, and KotlinFrom EverandJetpack Compose 1.6 Essentials: Developing Android Apps with Jetpack Compose 1.6, Android Studio, and KotlinRating: 5 out of 5 stars5/5 (1)
- Plan and DesignDocument4 pagesPlan and Designsanique peterkinNo ratings yet
- Plasma TV Presentation by 07dec047Document48 pagesPlasma TV Presentation by 07dec047Jigisha DodiyaNo ratings yet
- Airfoil Selection PDFDocument3 pagesAirfoil Selection PDFELMER VILLEGASNo ratings yet
- C Programming MCQDocument50 pagesC Programming MCQDurga ShivNo ratings yet
- What Is Optical Power BudgetDocument6 pagesWhat Is Optical Power BudgetAmir SalahNo ratings yet
- Yoshitake Kawaki KYDocument19 pagesYoshitake Kawaki KYAkif DinçNo ratings yet
- AE50-30-00 110V DC ContactorDocument4 pagesAE50-30-00 110V DC ContactorEdgar Allan OlescoNo ratings yet
- 2204 PRC 16Document9 pages2204 PRC 16Suudhakar GNo ratings yet
- S17 2170501 CreDocument3 pagesS17 2170501 CremorganNo ratings yet
- Using and Interpreting CronbachDocument5 pagesUsing and Interpreting CronbachMay Angelica TenezaNo ratings yet
- Boiler Chemical Cleaning ProcedureDocument20 pagesBoiler Chemical Cleaning ProcedureHandoko AurelNo ratings yet
- Ase 18 2 GaDocument36 pagesAse 18 2 Gac131508No ratings yet
- Debug Card Manual 1 PDFDocument29 pagesDebug Card Manual 1 PDFPavel PetrescuNo ratings yet
- Cathode Ray Oscilloscope - A Complete Basic GuideDocument3 pagesCathode Ray Oscilloscope - A Complete Basic GuidetowfiqeeeNo ratings yet
- ABB - 12 - E - 16 Materials and Semi-Finished Products For Switchgear InstallationsDocument24 pagesABB - 12 - E - 16 Materials and Semi-Finished Products For Switchgear InstallationsHan HuangNo ratings yet
- CO2 Volume in EggsDocument5 pagesCO2 Volume in EggsFederico LeonNo ratings yet
- GIGABYTE GEFORCE GTX 760 GV-N760OC-2GD (P2002 2GB GDDR5, 256b, 64Mx32) REV. 2.0Document34 pagesGIGABYTE GEFORCE GTX 760 GV-N760OC-2GD (P2002 2GB GDDR5, 256b, 64Mx32) REV. 2.0Juan RiquelmeNo ratings yet
- Gen Math Module 1Document15 pagesGen Math Module 1Bernard Dale B. RocientoNo ratings yet
- Lifting Lug AnalysisDocument3 pagesLifting Lug Analysisராபர்ட் ஆன்றோ ரெனி67% (3)
- Bagging and Boosting: 9.520 Class 10, 13 March 2006 Sasha RakhlinDocument19 pagesBagging and Boosting: 9.520 Class 10, 13 March 2006 Sasha RakhlinAkhi DanuNo ratings yet
- Din 2458Document0 pagesDin 2458student_blNo ratings yet
- Application of Rate of Reaction in Daily LifeDocument2 pagesApplication of Rate of Reaction in Daily LifeZhi Xian PoahNo ratings yet
- 8 Factor AnalysisDocument30 pages8 Factor AnalysisPriya DattaNo ratings yet
- Visual Inspection of Crimped ConnectionsDocument1 pageVisual Inspection of Crimped Connectionsvinay gayateNo ratings yet
- R5211001-Electromagnetic Waves and Transmission LinesDocument4 pagesR5211001-Electromagnetic Waves and Transmission LinessivabharathamurthyNo ratings yet
- Determinants+ (Properties+,+Mulitplication+of+Determinants+) JEE+2021Document44 pagesDeterminants+ (Properties+,+Mulitplication+of+Determinants+) JEE+2021BrucleeNo ratings yet
- Eric Rassin - Case Studies in Legal Psychology - Psychological Perspectives On Criminal Evidence-Springer (2023)Document161 pagesEric Rassin - Case Studies in Legal Psychology - Psychological Perspectives On Criminal Evidence-Springer (2023)rpc0601No ratings yet