Download as docx, pdf, or txt
You might also like
- Man User DPS232Document110 pagesMan User DPS232Douglas BemficaNo ratings yet
- Manual 3553-54 PDFDocument116 pagesManual 3553-54 PDFLuiz Claudio Martins FreireNo ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- SKANTI - UAIS - 2100 - Operators Manual PDFDocument48 pagesSKANTI - UAIS - 2100 - Operators Manual PDFHetal AcharyaNo ratings yet
- Charles 5000 Manual) 40-50-60ampDocument14 pagesCharles 5000 Manual) 40-50-60amporlandoNo ratings yet
- MD TTM50A Service ManualDocument49 pagesMD TTM50A Service ManualAlexandru Diaconu100% (1)
- Service Parts Supply Status List For Discontinued Models As of 15 Nov 2012Document3 pagesService Parts Supply Status List For Discontinued Models As of 15 Nov 2012Afrizal SetiawanNo ratings yet
- Radius 700 - Long Range Battery Operated TransponderDocument2 pagesRadius 700 - Long Range Battery Operated TransponderNishant PandyaNo ratings yet
- Raymarine Ray215 Ray215e VHF RadiosDocument68 pagesRaymarine Ray215 Ray215e VHF RadioskiraNo ratings yet
- VMFT Radar ReviewDocument28 pagesVMFT Radar ReviewHoovers RamirezNo ratings yet
- Speery Marine NAVIKNOT Speed Log 600Document148 pagesSpeery Marine NAVIKNOT Speed Log 600Parul MehtaNo ratings yet
- Report On Starch AdhesivesDocument4 pagesReport On Starch AdhesivesmadhusudhansNo ratings yet
- Fsn170010-E (FSN170010)Document4 pagesFsn170010-E (FSN170010)Tseng EthanNo ratings yet
- F2 - User Manual - 5490063-00A05 - May 2016Document87 pagesF2 - User Manual - 5490063-00A05 - May 2016bob228340100% (1)
- Autopilot ManualDocument73 pagesAutopilot ManualRyk BroNo ratings yet
- ZF Joystick Maneuvering System: Marine Propulsion SystemsDocument4 pagesZF Joystick Maneuvering System: Marine Propulsion SystemsAlbertoNo ratings yet
- Simrad rd68 VHF ManualDocument66 pagesSimrad rd68 VHF ManualAnonymous nC9gpUWP100% (1)
- C Series Installation Instructions 87020 3 enDocument54 pagesC Series Installation Instructions 87020 3 enpsad80No ratings yet
- Saab R4 AIS - Operator's ManualDocument66 pagesSaab R4 AIS - Operator's ManualGianmario CampaniniNo ratings yet
- Fishing With Bottom GillnetsDocument56 pagesFishing With Bottom GillnetsKyrbi GregorioNo ratings yet
- 6377234Document110 pages6377234Cristi CalotaNo ratings yet
- Furuno Fcv587 Fcv627 Operator's ManualDocument72 pagesFuruno Fcv587 Fcv627 Operator's ManualCesar MosNo ratings yet
- Kel Vin Hughes: System Manual For The Manta Networked Multi-Functional DisplayDocument70 pagesKel Vin Hughes: System Manual For The Manta Networked Multi-Functional DisplayMohamed ElhossenyNo ratings yet
- Smartfind M5 Class A / Inland AIS Installation and Maintenance ManualDocument104 pagesSmartfind M5 Class A / Inland AIS Installation and Maintenance ManualRoyson Joseph0% (1)
- Bonny 13 EspañolDocument284 pagesBonny 13 EspañolOscar CorderoNo ratings yet
- Simrad MX610 - DGPSDocument86 pagesSimrad MX610 - DGPSAhmed Ibrahim AbdelatyNo ratings yet
- Quotation: Radius Transponders For Petroleum Marine Service CoDocument14 pagesQuotation: Radius Transponders For Petroleum Marine Service CoMohamed MohamedNo ratings yet
- Autopilot Robertson Ap9 Mk3Document202 pagesAutopilot Robertson Ap9 Mk3chinhvuNo ratings yet
- JLN-550 Instruction Manual E2Document48 pagesJLN-550 Instruction Manual E2services HL100% (1)
- Seatex DPS 102 User's ManualDocument94 pagesSeatex DPS 102 User's ManualilgarNo ratings yet
- Type e Repeat Back Unit Operator's ManualDocument9 pagesType e Repeat Back Unit Operator's ManualClarence ClarNo ratings yet
- SSAS Test PDFDocument48 pagesSSAS Test PDFLevyNo ratings yet
- IC M710 - ENG 6a Manual BookDocument28 pagesIC M710 - ENG 6a Manual BookDaud Antony BonteNo ratings yet
- vr7000 Installation Manual PDFDocument152 pagesvr7000 Installation Manual PDFhomecncrouterNo ratings yet
- GAW Travel503 1003 Deutsch EnglishDocument56 pagesGAW Travel503 1003 Deutsch EnglishiiiMMM80No ratings yet
- KTN-70A OME Rev01 PDFDocument66 pagesKTN-70A OME Rev01 PDFZakaria ChowdhuryNo ratings yet
- Mfs6bz - Mfs8b - Mfs9.8b - 2016Document92 pagesMfs6bz - Mfs8b - Mfs9.8b - 2016Alessandro MenichiniNo ratings yet
- Furuno BACK GP-80 User ManualDocument103 pagesFuruno BACK GP-80 User ManualBillNo ratings yet
- Operator'S Manual: 6" Echo SounderDocument52 pagesOperator'S Manual: 6" Echo SounderDaniel IzquierdoNo ratings yet
- Radascan View Installers GuideDocument63 pagesRadascan View Installers GuideLuana Marchiori100% (1)
- VMFT Radar InstallationDocument54 pagesVMFT Radar InstallationHoovers RamirezNo ratings yet
- Asus Ac2400 Wireless Dual Band Gigabit Router RT Ac87u B H Photo 281970 User ManualDocument130 pagesAsus Ac2400 Wireless Dual Band Gigabit Router RT Ac87u B H Photo 281970 User ManualRudolf SudenNo ratings yet
- JRC Jfe 380 ManualDocument60 pagesJRC Jfe 380 ManualEUROTANK MARITIMENo ratings yet
- Repeater Compass System With Serial Interface RS 422: Operator, Technical and Service ManualDocument62 pagesRepeater Compass System With Serial Interface RS 422: Operator, Technical and Service Manualthien9999kraNo ratings yet
- E POD Propulsion Deck Mounted Stern Thruster Brochure 2020 Rev0Document9 pagesE POD Propulsion Deck Mounted Stern Thruster Brochure 2020 Rev0srichalam01No ratings yet
- FM 8500Document99 pagesFM 8500SergeyNo ratings yet
- 7000 118-200, K1, R5 Solid AIS Transponder SystemDocument100 pages7000 118-200, K1, R5 Solid AIS Transponder SystemcristianocalheirosNo ratings yet
- Masterpact NT NW InglesDocument204 pagesMasterpact NT NW InglesLuís LulaNo ratings yet
- VR3000 VR3000S Operator's Manual G1Document54 pagesVR3000 VR3000S Operator's Manual G1Miguel PerezNo ratings yet
- Operation PDFDocument64 pagesOperation PDFArjunroyEdwardNo ratings yet
- NWZ-4610 Instruction ManualDocument120 pagesNWZ-4610 Instruction ManualТодор ТодоровNo ratings yet
- FM8800S D Operator S Manual-JDocument137 pagesFM8800S D Operator S Manual-JtansamaserNo ratings yet
- Simrad SX90 Manual de Referencia PDFDocument436 pagesSimrad SX90 Manual de Referencia PDFFernando VasquezNo ratings yet
- FR1510MK3 Series Operator's Manual TDocument120 pagesFR1510MK3 Series Operator's Manual TarlindojlNo ratings yet
- 709507A0 VDR M4, Reboot VDR, Capsule Restart InstructionDocument2 pages709507A0 VDR M4, Reboot VDR, Capsule Restart InstructionSergMegaNo ratings yet
- FELCOM 15 Operator S Manual-KDocument232 pagesFELCOM 15 Operator S Manual-KtansamaserNo ratings yet
- Manual Alphaminicourse Version 2.2Document68 pagesManual Alphaminicourse Version 2.2Du Radu100% (1)
- Módulo 1 - Estação OperadorDocument22 pagesMódulo 1 - Estação OperadorLucas GonçalvesNo ratings yet
- Auto Glide Manual ADocument22 pagesAuto Glide Manual AVolker DietrichNo ratings yet
- S-Tec 55X AutopilotDocument24 pagesS-Tec 55X AutopilotzermoNo ratings yet
- Kone3000S Minispace™Scenic Car Technical Information For SalesDocument11 pagesKone3000S Minispace™Scenic Car Technical Information For SalesYaşar EKNo ratings yet
- Tramfloc Polymer TechnologyDocument8 pagesTramfloc Polymer TechnologyVel MuruganNo ratings yet
- 4.9.1. Precipitation HardeningDocument5 pages4.9.1. Precipitation HardeningVinothKumarVinothNo ratings yet
- 3800 PDFDocument202 pages3800 PDFRenny MataNo ratings yet
- 5 Dairy Processing - Clarification and Cream SeparationDocument6 pages5 Dairy Processing - Clarification and Cream SeparationSPMUSER9ANo ratings yet
- Eye Movement-Based Human Computer Interaction TechniquesDocument5 pagesEye Movement-Based Human Computer Interaction TechniquesSreekanth MarlapatiNo ratings yet
- Skyblivion Architecture GuidelinesDocument11 pagesSkyblivion Architecture GuidelinesBrody EvensonNo ratings yet
- Shimano 2020-2021 Compatibility v035 enDocument70 pagesShimano 2020-2021 Compatibility v035 enrescalerasNo ratings yet
- Miele Appliances Electrical Connection OverviewDocument3 pagesMiele Appliances Electrical Connection Overviewhappy_jonNo ratings yet
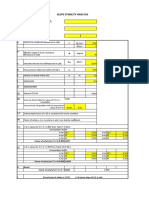
- Software Slope Stabilty Analysis FinalDocument1 pageSoftware Slope Stabilty Analysis FinalETTL UDAIPURNo ratings yet
- AEC Drying Brochure AEC2-115.1Document12 pagesAEC Drying Brochure AEC2-115.1serdigital0No ratings yet
- 18VP185 BBC London - Parts Book PDFDocument352 pages18VP185 BBC London - Parts Book PDFsxturbo100% (2)
- Why It Does Not MatterDocument31 pagesWhy It Does Not MatterDavid I AgogoNo ratings yet
- Diagram SankeyDocument5 pagesDiagram SankeyNur WidyaNo ratings yet
- Vector Network AnalyzerDocument2 pagesVector Network Analyzerkpgs12No ratings yet
- Parts List 38 269 22 95: Helical-Bevel Gear Unit KA107, KH107, KV107, KT107, KA107B, KH107B, KV107B, KT107BDocument4 pagesParts List 38 269 22 95: Helical-Bevel Gear Unit KA107, KH107, KV107, KT107, KA107B, KH107B, KV107B, KT107BFotografia PopularNo ratings yet
- Motion Control With LabviewDocument30 pagesMotion Control With Labviewsocat120013485No ratings yet
- Heat Load Estimation E20 Form SIDocument1 pageHeat Load Estimation E20 Form SIAslam AhamedNo ratings yet
- NEC IDU IPASOLINK 400A Minimum ConfigurationDocument5 pagesNEC IDU IPASOLINK 400A Minimum ConfigurationNakul KulkarniNo ratings yet
- Batch Short Circuit Users ManualDocument64 pagesBatch Short Circuit Users ManualAshleyNo ratings yet
- Research Paper On Building MaterialsDocument7 pagesResearch Paper On Building Materialsafnknlsjcpanrs100% (1)
- SOP-T-0005 - Standard Operating (Test) Procedure - CUBE TESTDocument18 pagesSOP-T-0005 - Standard Operating (Test) Procedure - CUBE TESTAvidip DeyNo ratings yet
- Pompa Sirkulasi AP 156,3 LPM @60mDocument3 pagesPompa Sirkulasi AP 156,3 LPM @60mAndreas B KresnawanNo ratings yet
- 00-Saip-06 Pressure TestDocument4 pages00-Saip-06 Pressure TestUzair AhmadNo ratings yet
- Daftar Harga Mobil HondaDocument2 pagesDaftar Harga Mobil HondasantanNo ratings yet
- Research Article: Solution of Turbine Blade Cascade Flow Using An Improved Panel MethodDocument7 pagesResearch Article: Solution of Turbine Blade Cascade Flow Using An Improved Panel MethodAndre RochaNo ratings yet
- Inkjet RefillingDocument5 pagesInkjet RefillingpedroNo ratings yet
- Solar Brochure February 2023Document24 pagesSolar Brochure February 2023prakistaoNo ratings yet
- ENGDocument28 pagesENGTamil Selvan100% (1)