Download as pdf or txt
You might also like
- Integration Practice (The Lot)Document1 pageIntegration Practice (The Lot)Xenon AsuncionNo ratings yet
- Mathematics - General: Candidates Are Required To Give Their Answers in Their Own Words As Far As PracticableDocument8 pagesMathematics - General: Candidates Are Required To Give Their Answers in Their Own Words As Far As PracticableRajarsi ThakurNo ratings yet
- Linear AlgebraDocument40 pagesLinear AlgebraHaroldNo ratings yet
- Dynamic Analysis Using FeaDocument114 pagesDynamic Analysis Using FeaDr P Ravinder ReddyNo ratings yet
- เอกซ์โพเนนเชียลและลอการิทึมDocument89 pagesเอกซ์โพเนนเชียลและลอการิทึมLotus SoftsNo ratings yet
- 2022 H2 C8A Integration Techniques - TutorialDocument5 pages2022 H2 C8A Integration Techniques - TutorialKyan 2005No ratings yet
- 1 Rational I Domain Limits AsymptotesDocument5 pages1 Rational I Domain Limits AsymptotesIbrahim AyoubNo ratings yet
- Jee Mains Pattern: Mathematics: LIMIT Practice Paper - 02 Answer KeyDocument4 pagesJee Mains Pattern: Mathematics: LIMIT Practice Paper - 02 Answer KeySandeep PantNo ratings yet
- H2 MYE Revision Package Integration SolutionsDocument9 pagesH2 MYE Revision Package Integration SolutionsTimothy HandokoNo ratings yet
- 考研数学公式大全(高数+线代+概率) PDFRemovePassword PDFDocument48 pages考研数学公式大全(高数+线代+概率) PDFRemovePassword PDFwb c (cwbzjh)No ratings yet
- Singular Value DecompositionDocument36 pagesSingular Value DecompositionPASUPULA SATWIKNo ratings yet
- 11 Solusi Deret Untuk Pers DifferensialDocument30 pages11 Solusi Deret Untuk Pers DifferensialReza HermawanNo ratings yet
- Measures of DispersionDocument45 pagesMeasures of DispersionfaridNo ratings yet
- Correlation and RegressionDocument7 pagesCorrelation and RegressionDheeraj MakamNo ratings yet
- Layers of The AtmosphereDocument5 pagesLayers of The AtmosphereEduardo da CunhaNo ratings yet
- chap05 김지현3Document26 pageschap05 김지현3JH KIMNo ratings yet
- SVMDocument19 pagesSVMGobiNo ratings yet
- SVM - AI by HandDocument19 pagesSVM - AI by HandDeepak KumarNo ratings yet
- Universidad Nacional Autónoma Altoandina de Tarma: Ep Ingeniería AgroindusttrialDocument1 pageUniversidad Nacional Autónoma Altoandina de Tarma: Ep Ingeniería AgroindusttrialImanol Jesus Palpa ChavezNo ratings yet
- Inde. Tntrgral-2Document69 pagesInde. Tntrgral-2ztandard123No ratings yet
- Lista de Exercícios 2b - MATi01 - Cálculo I - T6 - RESPOSTASDocument1 pageLista de Exercícios 2b - MATi01 - Cálculo I - T6 - RESPOSTASatendimentolealusersNo ratings yet
- 01-04-2020 - SR MPC Programme 3 - Prog-A - Eam-Cumulative Test QPDocument16 pages01-04-2020 - SR MPC Programme 3 - Prog-A - Eam-Cumulative Test QPDharmik Pawan KumarNo ratings yet
- Inverse of The Vandermonde and Vandermonde Con Uent MatricesDocument6 pagesInverse of The Vandermonde and Vandermonde Con Uent MatricesAlex ZentenoNo ratings yet
- Advanced Level Problem Solving (ALPS-5) - SolutionDocument19 pagesAdvanced Level Problem Solving (ALPS-5) - SolutionAyush guptaNo ratings yet
- Ebook Calculus and Its Applications 11Th Edition Bittinger Solutions Manual Full Chapter PDFDocument68 pagesEbook Calculus and Its Applications 11Th Edition Bittinger Solutions Manual Full Chapter PDFMarcusKingbicy100% (16)
- Analysis Methods: Formulas For Structural DynamicsDocument1 pageAnalysis Methods: Formulas For Structural Dynamicsivan bolañosNo ratings yet
- 01 3raaanvarinsireviewDocument22 pages01 3raaanvarinsireviewPerwira DKINo ratings yet
- Cross-Correlation and Auto - CorrelationDocument6 pagesCross-Correlation and Auto - CorrelationSowmya AnanthaNo ratings yet
- Lecture 15Document12 pagesLecture 15trantuantu31032004No ratings yet
- MA6351Document73 pagesMA6351Selva KumarNo ratings yet
- Lesson 13-Indeterminate FormsDocument14 pagesLesson 13-Indeterminate FormsWayne CasanovaNo ratings yet
- Lect13 2Document4 pagesLect13 2eliyasworku2No ratings yet
- Cse-Iii-Engineering Mathematics - Iii (15mat31) - Solution PDFDocument68 pagesCse-Iii-Engineering Mathematics - Iii (15mat31) - Solution PDFM.A rajaNo ratings yet
- Development of The Linear-Strain Triangle EquationsDocument26 pagesDevelopment of The Linear-Strain Triangle EquationsFábio1 GamaNo ratings yet
- Transelliptical Component Analysis: Johns Hopkins University Princeton UniversityDocument26 pagesTranselliptical Component Analysis: Johns Hopkins University Princeton UniversitybobmezzNo ratings yet
- (502434) Area Under The Curve PDFDocument15 pages(502434) Area Under The Curve PDFPriyanshu KumarNo ratings yet
- Badm210-Tt1-Fs - V3Document1 pageBadm210-Tt1-Fs - V3vishalgupta9133No ratings yet
- Limited Developments: Ÿcos XDocument1 pageLimited Developments: Ÿcos XSofian HabbouchNo ratings yet
- MCE 302 FEx Q 4 (June 22, 2021)Document1 pageMCE 302 FEx Q 4 (June 22, 2021)manameisghostNo ratings yet
- Part (C) : Mathematics: Major Test - 6 (Adv) Mathematics Paper - Ii (CODE:)Document12 pagesPart (C) : Mathematics: Major Test - 6 (Adv) Mathematics Paper - Ii (CODE:)JainNo ratings yet
- LECTURE 5: Optimisation of Catalytic ReactionsDocument34 pagesLECTURE 5: Optimisation of Catalytic ReactionsC. MNo ratings yet
- Introduction To Finite Element Method and Applications: Pietro CrespiDocument37 pagesIntroduction To Finite Element Method and Applications: Pietro CrespiDaniele Dominic ColluraNo ratings yet
- MA6351Document73 pagesMA6351XaviFernandoNo ratings yet
- Practice 6 (Solution) : 1. Let - Then andDocument2 pagesPractice 6 (Solution) : 1. Let - Then andckithoNo ratings yet
- Slide chpt04Document27 pagesSlide chpt04shambel kipNo ratings yet
- More Properties of ExponentsDocument2 pagesMore Properties of Exponentsharry potterNo ratings yet
- Infinite Algebra 2 - Properties of ExponentsDocument2 pagesInfinite Algebra 2 - Properties of ExponentsdevikaNo ratings yet
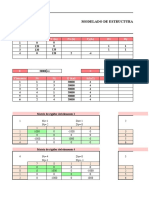
- Modelado de Estructura: Nodo X (In) Y (In) FX (K) Fy (K) RX RyDocument19 pagesModelado de Estructura: Nodo X (In) Y (In) FX (K) Fy (K) RX RyEdgar AlfonsoNo ratings yet
- Rules of Differentiation & Taylor Series: 7.1 Review: Derivative and Derivative RulesDocument33 pagesRules of Differentiation & Taylor Series: 7.1 Review: Derivative and Derivative Rulesranim najibNo ratings yet
- 1 X X X X : Examples: Example 1: Consider The SystemDocument16 pages1 X X X X : Examples: Example 1: Consider The SystemSantiago Garrido BullónNo ratings yet
- Me 362 - 3Document18 pagesMe 362 - 3ElormeNo ratings yet
- Module 3 Radical ExpressionsDocument19 pagesModule 3 Radical ExpressionsAthena Jane NapolisNo ratings yet
- W-13 Solving The Linear Equation Systems by Iteration MethodDocument24 pagesW-13 Solving The Linear Equation Systems by Iteration Methodumuhuza salomonNo ratings yet
- Computer Graphics: Lecture 05-Polygon FillingDocument32 pagesComputer Graphics: Lecture 05-Polygon Fillingdevzani nipaNo ratings yet
- Jacobians:: Velocities and Static ForceDocument30 pagesJacobians:: Velocities and Static ForceKo PyaeNo ratings yet
- MIDAS Civil V2.1 Release Webinar 1461251205Document35 pagesMIDAS Civil V2.1 Release Webinar 1461251205Lengendary PhubrNo ratings yet
- CE304-Unit 5-Lect2-Jumah 2018Document14 pagesCE304-Unit 5-Lect2-Jumah 2018محمد بركاتNo ratings yet
- Inverse Kinematics-3Document51 pagesInverse Kinematics-3Nahom AlemnewNo ratings yet
- Lesson 13-Indeterminate FormsDocument14 pagesLesson 13-Indeterminate FormsCupackeNo ratings yet
- Factoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)From EverandFactoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)No ratings yet
- Lubrication Journal Bearings PDFDocument81 pagesLubrication Journal Bearings PDFEric21No ratings yet
- 2014wmi Final Us-Q2-1Document4 pages2014wmi Final Us-Q2-1herryhr100% (2)
- Overview of Pre-And Post-Processing of Ambient-Noise CorrelationsDocument44 pagesOverview of Pre-And Post-Processing of Ambient-Noise CorrelationsJennifer WatsonNo ratings yet
- Usa UnivquestDocument56 pagesUsa UnivquestMahim SinghNo ratings yet
- Nonlinear Site Response Analysis With Pore-Water Pressure Generation For Liquefaction Triggering EvaluationDocument17 pagesNonlinear Site Response Analysis With Pore-Water Pressure Generation For Liquefaction Triggering EvaluationSiwadol DejphumeeNo ratings yet
- Tree Questions: Li Yin February 7, 2019Document46 pagesTree Questions: Li Yin February 7, 2019markNo ratings yet
- Lecture Note 2019 PDFDocument235 pagesLecture Note 2019 PDFRadhika Goyal100% (1)
- Robot Path PlanningDocument56 pagesRobot Path PlanningnaderjsaNo ratings yet
- Improper IntegralsDocument28 pagesImproper Integralshyma kadakatlaNo ratings yet
- Simulation Methods in Statistical Physics, Project Report, FK7029, Stockholm UniversityDocument31 pagesSimulation Methods in Statistical Physics, Project Report, FK7029, Stockholm Universitysebastian100% (2)
- Describing MotionDocument2 pagesDescribing MotionEunice CorreaNo ratings yet
- Analytic Solution For Flow of Sisko Fluid Through A Porous MediumDocument15 pagesAnalytic Solution For Flow of Sisko Fluid Through A Porous MediumMuhammad FarooqNo ratings yet
- Ghosh - Rock Stress Measurements For Underground ExcavationsDocument9 pagesGhosh - Rock Stress Measurements For Underground ExcavationsnumspyNo ratings yet
- 4 - Binary TreesDocument39 pages4 - Binary TreesAnonymous zK1oHu0zNo ratings yet
- A Freecad ManualDocument180 pagesA Freecad ManualDani MartínNo ratings yet
- KSSR Mathematics Year 4Document22 pagesKSSR Mathematics Year 4Suganthi SupaiahNo ratings yet
- LS - 0 - 2 - 1 - 023e7404312ef-Trigonometry Bhagwati Maths 51 To 134Document6 pagesLS - 0 - 2 - 1 - 023e7404312ef-Trigonometry Bhagwati Maths 51 To 134Nitin DangiNo ratings yet
- BA2002 Module 3Document13 pagesBA2002 Module 3Lara Camille CelestialNo ratings yet
- (Atlantis Series in Dynamical Systems 2) Jaap Eldering (Auth.) - Normally Hyperbolic Invariant Manifolds - The Noncompact Case-Atlantis Press (2013)Document197 pages(Atlantis Series in Dynamical Systems 2) Jaap Eldering (Auth.) - Normally Hyperbolic Invariant Manifolds - The Noncompact Case-Atlantis Press (2013)Antonio Veloso MartinsNo ratings yet
- Unit 5Document18 pagesUnit 5Deepak SinghNo ratings yet
- Math 104 Berkeley Homework 1Document2 pagesMath 104 Berkeley Homework 1Taylor TamNo ratings yet
- CO - Discrete and Continuous VariablesDocument9 pagesCO - Discrete and Continuous VariablesRolly FranciscoNo ratings yet
- Assignment 1Document3 pagesAssignment 1m4t4ronNo ratings yet
- Gen Math11 - Q1 - Mod1 - Functions - v2Document28 pagesGen Math11 - Q1 - Mod1 - Functions - v2Anonymous 6gthRen100% (1)
- Soft MaxDocument6 pagesSoft MaxPooja PatwariNo ratings yet
- Timing Optimization Through Clock Skew Scheduling - Ivan S.kourtev, Baris Taskin, Eby G. FriedmanDocument274 pagesTiming Optimization Through Clock Skew Scheduling - Ivan S.kourtev, Baris Taskin, Eby G. FriedmanAnonymous VG6Zat1o100% (1)
- KAPSEL 4 KELOMPOK 2 TMTK 6A BaruDocument19 pagesKAPSEL 4 KELOMPOK 2 TMTK 6A BaruNurul ItqiyahNo ratings yet
- DSolve Function of MathematicaDocument6 pagesDSolve Function of MathematicammrmathsiubdNo ratings yet
- Structural EngineeringDocument12 pagesStructural EngineeringBTE100% (1)
- 20BCS2334 Jitesh KumarDocument4 pages20BCS2334 Jitesh KumarjiteshkumardjNo ratings yet