Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- Datasheet & Specifications Eco-5200Document2 pagesDatasheet & Specifications Eco-5200razeall333222No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Nfpa 497 2012Document1 pageNfpa 497 2012Kaka Baba100% (1)
- Luminous Inverter PDFDocument30 pagesLuminous Inverter PDFMaheshNo ratings yet
- Passed or Past - OxfordWords Blog PDFDocument9 pagesPassed or Past - OxfordWords Blog PDFMohamad SannanNo ratings yet
- EE 332 Midterm Fall 2005 (A1) : SolutionsDocument6 pagesEE 332 Midterm Fall 2005 (A1) : SolutionsMohamad SannanNo ratings yet
- Power Factor - WikipediaDocument11 pagesPower Factor - WikipediaMohamad SannanNo ratings yet
- Quiz - Hazmat - Hazard ClassificationDocument3 pagesQuiz - Hazmat - Hazard ClassificationMohamad SannanNo ratings yet
- (W) Gc2208ledgv-Tjl - 1603Document1 page(W) Gc2208ledgv-Tjl - 1603Mohamad SannanNo ratings yet
- BookDocument1 pageBookMohamad SannanNo ratings yet
- Nonresidential Lighting-Indoor LPDDocument25 pagesNonresidential Lighting-Indoor LPDMohamad SannanNo ratings yet
- Delta and Wye 3-Phase Circuits - AC Electric Circuits WorksheetsDocument10 pagesDelta and Wye 3-Phase Circuits - AC Electric Circuits WorksheetsMohamad SannanNo ratings yet
- Delta and Wye 3-Phase Circuits - AC Electric Circuits WorksheetsDocument10 pagesDelta and Wye 3-Phase Circuits - AC Electric Circuits WorksheetsMohamad SannanNo ratings yet
- Power II 2015 2016 Tutorials PDFDocument42 pagesPower II 2015 2016 Tutorials PDFMohamad SannanNo ratings yet
- Date DrawnDocument1 pageDate DrawnMohamad SannanNo ratings yet
- Power II 2015 2016 Tutorials PDFDocument42 pagesPower II 2015 2016 Tutorials PDFMohamad SannanNo ratings yet
- TI-1000-1109 - Lubricating Oil For Type 2,3,4 and 6Document5 pagesTI-1000-1109 - Lubricating Oil For Type 2,3,4 and 6Jamil AhmedNo ratings yet
- Section - A Attempt Any Four Questions From Attempt Any Two Questions FromDocument2 pagesSection - A Attempt Any Four Questions From Attempt Any Two Questions Fromrajbir kaurNo ratings yet
- Shallco Series 1 Auxiliary Switches (MOC and TOC) : ElectricalDocument1 pageShallco Series 1 Auxiliary Switches (MOC and TOC) : ElectricalRodNo ratings yet
- AKA XeroPoint Hybrid Marine BRCH V4 - 00Document4 pagesAKA XeroPoint Hybrid Marine BRCH V4 - 00Florin CrihanNo ratings yet
- DS6 Soft Start ControllersDocument11 pagesDS6 Soft Start ControllersMihailo MilosevicNo ratings yet
- Wapda Final ReportDocument115 pagesWapda Final Report✬ SHANZA MALIK ✬100% (4)
- 6 Minute English Space-Saving Solar HacksDocument5 pages6 Minute English Space-Saving Solar HacksHelin OrtaçNo ratings yet
- Py PSADocument129 pagesPy PSAJohann WibowoNo ratings yet
- (Download PDF) Schaums Outline of College Physics Twelfth Edition Eugene Hecht Online Ebook All Chapter PDFDocument42 pages(Download PDF) Schaums Outline of College Physics Twelfth Edition Eugene Hecht Online Ebook All Chapter PDFdaryl.boucher808100% (14)
- Internal Combustion Engine ProblemsDocument7 pagesInternal Combustion Engine ProblemsGeetha Krishna ChallaNo ratings yet
- International Classification For Standards (Ics)Document6 pagesInternational Classification For Standards (Ics)bhongcNo ratings yet
- Geography Essay HL-ChernobylDocument3 pagesGeography Essay HL-ChernobylNimisha Sharma100% (1)
- Ee2i Fee 22212 Ut-1 030323Document4 pagesEe2i Fee 22212 Ut-1 030323ABHI THORATNo ratings yet
- G.2-The Bottom of The Barrel (BOB)Document46 pagesG.2-The Bottom of The Barrel (BOB)Burak GülenNo ratings yet
- Status of Biofuelled Turbec Microturbines: Bio-Fuelled Micro Gas Turbines in EuropeDocument10 pagesStatus of Biofuelled Turbec Microturbines: Bio-Fuelled Micro Gas Turbines in EuropedfvgdfvdfvdsvsfvssacsasNo ratings yet
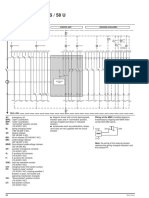
- Wiring Diagrams STR 18 M / 28 D / 38 S / 58 U: Masterpact: ConnectionDocument21 pagesWiring Diagrams STR 18 M / 28 D / 38 S / 58 U: Masterpact: ConnectionSidali KilardjNo ratings yet
- AlternatorDocument16 pagesAlternatorjeevapillay100% (1)
- VW3A1102 DatasheetDocument3 pagesVW3A1102 Datasheetjuan manuelNo ratings yet
- Fluid MechanicsDocument25 pagesFluid MechanicsforzamaNo ratings yet
- Product Data Sheet: iPRD40 Modular Surge Arrester - 3P + N - 350VDocument2 pagesProduct Data Sheet: iPRD40 Modular Surge Arrester - 3P + N - 350VSurangaGNo ratings yet
- Hypnotherapy Scripts 6 Steve G Jones Ebook PDFDocument3 pagesHypnotherapy Scripts 6 Steve G Jones Ebook PDFKedar KelkarNo ratings yet
- Idronics 27 Hot Water HeatpumpDocument84 pagesIdronics 27 Hot Water HeatpumpHuynh Le DuyenNo ratings yet
- Carignano, 2014 - Sizing and Performance Analysis of Battery PackDocument5 pagesCarignano, 2014 - Sizing and Performance Analysis of Battery Packdosen00545No ratings yet
- Letter To Honorable Chen Jining of The Chinese Ministry of Environmental ProtectionDocument2 pagesLetter To Honorable Chen Jining of The Chinese Ministry of Environmental ProtectionIsaiah X. SmithNo ratings yet
- Three Phase Inverter SpecificationDocument6 pagesThree Phase Inverter SpecificationSunu KarthikappallilNo ratings yet
- LECTURE 1 From Smart Grid To Energy InternetDocument43 pagesLECTURE 1 From Smart Grid To Energy Internetwing fatt hiewNo ratings yet
- Pip-Ms MG PDFDocument2 pagesPip-Ms MG PDFCristian MancholaNo ratings yet
- MR - Chamara CIN-349Document9 pagesMR - Chamara CIN-349ashenjayawardana37No ratings yet