Download as pdf or txt
You might also like
- D16 Torque SpecsDocument3 pagesD16 Torque SpecsKamal BimmerNo ratings yet
- A Step-by-Step Guide To Identification and Resolution of Error in Clinical Test SystemsDocument1 pageA Step-by-Step Guide To Identification and Resolution of Error in Clinical Test Systemsrose_almonte60% (5)
- Midterm Study Guide PDFDocument51 pagesMidterm Study Guide PDFTARA PEROOMIANNo ratings yet
- Robotic Arm SynopsisDocument16 pagesRobotic Arm SynopsisKeshav Arora0% (1)
- Unmanned Aerial Vehicle: Malaviya National Institute of Technology, JaipurDocument35 pagesUnmanned Aerial Vehicle: Malaviya National Institute of Technology, JaipurAjeetNo ratings yet
- Cable Driving RobotDocument20 pagesCable Driving RobotSohail TanveerNo ratings yet
- Ashis 2019Document5 pagesAshis 2019Pedro Cezar Rodrigues BaltazarNo ratings yet
- Inverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator RobotDocument22 pagesInverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator Robotvishakha bangareNo ratings yet
- NEWLab1 Servo2 v5 LabManualDocument9 pagesNEWLab1 Servo2 v5 LabManualkrups1991No ratings yet
- dSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorDocument6 pagesdSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorAshwani RanaNo ratings yet
- Position Control of Pick and Place Robotic ArmDocument5 pagesPosition Control of Pick and Place Robotic Armavinashs2410_41108610% (1)
- Space Simulation Lab ManualDocument55 pagesSpace Simulation Lab ManualBhanuNo ratings yet
- Modelling and Simulation For Industrial DC Motor Using Intelligent Control - ScienceDirectDocument6 pagesModelling and Simulation For Industrial DC Motor Using Intelligent Control - ScienceDirectMuhammad NurNo ratings yet
- ME 325 ControlSystems Lecture 1 2023 PDFDocument59 pagesME 325 ControlSystems Lecture 1 2023 PDFNissy ChinthapalliNo ratings yet
- BL-Full Control of A QuadrotorDocument6 pagesBL-Full Control of A QuadrotortammttgNo ratings yet
- Small Scale Helicopter Analysis and Controller Design For Non-Aggressive FlightsDocument8 pagesSmall Scale Helicopter Analysis and Controller Design For Non-Aggressive FlightsWindhi AerospaceNo ratings yet
- Design of Kalman Filters For Mobile Robots Evaluation of The Kinematic and Odometric ApproachDocument6 pagesDesign of Kalman Filters For Mobile Robots Evaluation of The Kinematic and Odometric ApproachShafayat AbrarNo ratings yet
- Basics of Studying Model For A Direct CuDocument8 pagesBasics of Studying Model For A Direct Cukhaledc4667No ratings yet
- Five Bar Planar ManipulatorDocument7 pagesFive Bar Planar Manipulatorsalberry14No ratings yet
- Unluturk 2013Document5 pagesUnluturk 2013Rajat SinghNo ratings yet
- Modeling, Control, and Simulation of A SCARA PRR-type Robot ManipulatorDocument11 pagesModeling, Control, and Simulation of A SCARA PRR-type Robot ManipulatorXuân BảoNo ratings yet
- CEP Control System Sp2019V2Document3 pagesCEP Control System Sp2019V2Ahmed AkramNo ratings yet
- ECE 572 Term Project Al-Refai, Bowman, Eisenbraun: Physical PrototypeDocument10 pagesECE 572 Term Project Al-Refai, Bowman, Eisenbraun: Physical Prototypelovaco01No ratings yet
- Jsaer2015 02 01 16 21Document6 pagesJsaer2015 02 01 16 21jsaereditorNo ratings yet
- Lab #2: PI Controller Design and Second Order SystemsDocument4 pagesLab #2: PI Controller Design and Second Order SystemssamielmadssiaNo ratings yet
- 2837-Article Text-4994-2-10-20220301Document6 pages2837-Article Text-4994-2-10-20220301NouredineAboufarisNo ratings yet
- Auto-Balancing Two Wheeled Inverted Pendulum RobotDocument6 pagesAuto-Balancing Two Wheeled Inverted Pendulum Robotsaran gowdaNo ratings yet
- Linear Control Engineering QBDocument11 pagesLinear Control Engineering QBAkizuki TakaoNo ratings yet
- Emelyanov 2020Document7 pagesEmelyanov 2020Mai Putra MuhammadiyahNo ratings yet
- M ErginSahinDocument9 pagesM ErginSahinbbb bbbNo ratings yet
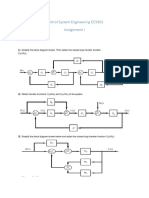
- Control System Engineering EC3301 Assignment I: Practice Following ProblemsDocument2 pagesControl System Engineering EC3301 Assignment I: Practice Following ProblemsAparajita PanigrahiNo ratings yet
- 10.2478 - Sbeef 2022 0018Document6 pages10.2478 - Sbeef 2022 0018Sudh Desi ContentsNo ratings yet
- Algoritmo WhasoutDocument6 pagesAlgoritmo WhasoutMiguel AguilarNo ratings yet
- Proceedings of The 9th WSEAS International Conference On APPLICATIONS of ELECTRICAL ENGINEERINGDocument7 pagesProceedings of The 9th WSEAS International Conference On APPLICATIONS of ELECTRICAL ENGINEERINGIbrahim SadohNo ratings yet
- Ijsetr Vol 7 Issue 7 467 472Document6 pagesIjsetr Vol 7 Issue 7 467 472Dana Chalyng'sNo ratings yet
- The Design and Simulation of Training Delta RobotDocument4 pagesThe Design and Simulation of Training Delta RobotFanny GaNo ratings yet
- 3 D o F Parallel Delta Inverse ISR2004Document7 pages3 D o F Parallel Delta Inverse ISR2004ahmedNo ratings yet
- DC Servo Paper - Cse007Document4 pagesDC Servo Paper - Cse007DrPrashant M. MenghalNo ratings yet
- C&i Lab-2019Document67 pagesC&i Lab-2019aniruthNo ratings yet
- Development of Low Grade Robotic Arm For Small IndustriesDocument12 pagesDevelopment of Low Grade Robotic Arm For Small IndustriesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Robust Fault Tolerant Control With Sensor Faults For A Four Rotor HelicopterDocument14 pagesRobust Fault Tolerant Control With Sensor Faults For A Four Rotor Helicopterstalker2222No ratings yet
- Position Control and Trajectory Tracking of The Stewart PlatformDocument25 pagesPosition Control and Trajectory Tracking of The Stewart PlatformDuskoNo ratings yet
- Direct Kinematic Modeling of 6R Robot Using Robotics ToolboxDocument4 pagesDirect Kinematic Modeling of 6R Robot Using Robotics ToolboxNedim BabicNo ratings yet
- K Patel 2010 IOP Conf. Ser. Earth Environ. Sci. 12 012048Document9 pagesK Patel 2010 IOP Conf. Ser. Earth Environ. Sci. 12 012048Pisindu DanushaNo ratings yet
- Numerical Prediction of A Bulb Turbine Performance Hill Chart Through RANS SimulationsDocument9 pagesNumerical Prediction of A Bulb Turbine Performance Hill Chart Through RANS SimulationsIvan Batistic BeloNo ratings yet
- The Inverse Kinematics Solution, Closed-Form Dynamics and Simulation of Adeptone Industrial RobotDocument6 pagesThe Inverse Kinematics Solution, Closed-Form Dynamics and Simulation of Adeptone Industrial RobotLabo DolonNo ratings yet
- LAB 1: Introduction To MATLAB and SimulinkDocument14 pagesLAB 1: Introduction To MATLAB and Simulinkwanxin leiNo ratings yet
- Robotic Arm Dynamic and Simulation With Virtual Re PDFDocument7 pagesRobotic Arm Dynamic and Simulation With Virtual Re PDFALA SOUISSINo ratings yet
- Investigation of Feasible Controller For Position Control of Flexible Joint Manipulator Using Multiple Control TechniquesDocument15 pagesInvestigation of Feasible Controller For Position Control of Flexible Joint Manipulator Using Multiple Control TechniquesGood GoodNo ratings yet
- Lab 5Document3 pagesLab 5Vu LeNo ratings yet
- A Study On The Control Methods Based On 3-DOF Helicopter ModelDocument8 pagesA Study On The Control Methods Based On 3-DOF Helicopter ModelosdacavNo ratings yet
- Sensor Less Control For IM Via Fuzzy Observer DesignDocument6 pagesSensor Less Control For IM Via Fuzzy Observer Designsajs201100% (1)
- IISTE Journals Publication Nearest EditiDocument8 pagesIISTE Journals Publication Nearest EditiNguyễn Hải ĐăngNo ratings yet
- Temperature ControlDocument18 pagesTemperature ControlgopikrishnaraoNo ratings yet
- Constant Kinetic Energy Robot Trajectory PlanningDocument16 pagesConstant Kinetic Energy Robot Trajectory PlanningstaktikaNo ratings yet
- Murcia 2018Document11 pagesMurcia 2018Nguyễn Khải ÂnNo ratings yet
- Ze050202290236 1Document9 pagesZe050202290236 1138 GowriNo ratings yet
- ECD Labs 2 Modified 22TL ECDDocument58 pagesECD Labs 2 Modified 22TL ECDAnjaliNo ratings yet
- Checked A - Novel - Ball - On - Beam - Stabilizing - Platform - With - Inertial - SensorsDocument8 pagesChecked A - Novel - Ball - On - Beam - Stabilizing - Platform - With - Inertial - Sensorscjm122000No ratings yet
- MATLABSimulink, Stepper Motor, Vector ControlDocument5 pagesMATLABSimulink, Stepper Motor, Vector ControlDobai SzilardNo ratings yet
- Vishakhapatnam Steel Plant, Vishakhapatnam.: Conducted atDocument160 pagesVishakhapatnam Steel Plant, Vishakhapatnam.: Conducted atPrakash MECH KiotNo ratings yet
- Acrobat Document 5Document182 pagesAcrobat Document 5Prakash MECH KiotNo ratings yet
- Centre For Research: Anna University CHENNAI 600 025 Dr. K.P.JAYA DirectorDocument1 pageCentre For Research: Anna University CHENNAI 600 025 Dr. K.P.JAYA DirectorPrakash MECH KiotNo ratings yet
- Brochure AICTE ATAL Academy Sponored FDP On Synthetic BiologyDocument2 pagesBrochure AICTE ATAL Academy Sponored FDP On Synthetic BiologyPrakash MECH KiotNo ratings yet
- Eee VL of Unit I, Ii, Iii, Iv, V (2020) )Document95 pagesEee VL of Unit I, Ii, Iii, Iv, V (2020) )Prakash MECH Kiot100% (1)
- Data Communication Errors: Networking 2Document24 pagesData Communication Errors: Networking 2Leonelyn Hermosa Gasco - CosidoNo ratings yet
- Design of Thrust Blocks - London - TedDocument21 pagesDesign of Thrust Blocks - London - Tedjdietz4100% (2)
- WW2 Military Bldgs PDFDocument102 pagesWW2 Military Bldgs PDFone-eyed fat manNo ratings yet
- Hakin9 03 2013 PDFDocument25 pagesHakin9 03 2013 PDFnoc_313No ratings yet
- Transfer: SectionDocument76 pagesTransfer: SectionmohhizbarNo ratings yet
- Evaluating Screening Performance: Where To StartDocument6 pagesEvaluating Screening Performance: Where To StartParthNo ratings yet
- G5 Q3W10 DLL MATH (MELCs)Document10 pagesG5 Q3W10 DLL MATH (MELCs)MYLEEN P. GONZALESNo ratings yet
- XE35EDocument6 pagesXE35EKiran ThakkarNo ratings yet
- 37PFL5332 LC7 (1) .1LDocument114 pages37PFL5332 LC7 (1) .1LWall BrysonNo ratings yet
- Use of Electrochemical Techniques in Metal Conservation: Programme, Abstracts and Details of The SpeakersDocument8 pagesUse of Electrochemical Techniques in Metal Conservation: Programme, Abstracts and Details of The SpeakersFred LeviNo ratings yet
- Inventory Question Bank 2013Document22 pagesInventory Question Bank 201344v8ct8cdyNo ratings yet
- Grammar - Pre-Intermediate Progress Test Unit 9 Test A - PDF - Lee Harvey Oswald - Violence PDFDocument12 pagesGrammar - Pre-Intermediate Progress Test Unit 9 Test A - PDF - Lee Harvey Oswald - Violence PDFAnna PalšováNo ratings yet
- FM - SSC JE - PYQs PDFDocument27 pagesFM - SSC JE - PYQs PDFR ShyamNo ratings yet
- Gear Lubricants EffectDocument37 pagesGear Lubricants EffectTatumi Sobue100% (1)
- 2389 Amdocs Placement Paper SQLDocument3 pages2389 Amdocs Placement Paper SQLSahil Shashikant BhosleNo ratings yet
- Sbi3C Name: Characteristics of Bacteria Worksheet: Big Idea! IdeasDocument2 pagesSbi3C Name: Characteristics of Bacteria Worksheet: Big Idea! IdeasPaulina JakubiecNo ratings yet
- BT Forklift Vector Vce125acsf Spare Parts Catalog Operator Service ManualDocument22 pagesBT Forklift Vector Vce125acsf Spare Parts Catalog Operator Service Manualjordandavis060201cbd100% (45)
- "Flexible Manufacturing System": Department of Mechanical EngineeringDocument32 pages"Flexible Manufacturing System": Department of Mechanical EngineeringGoutham ReddyNo ratings yet
- Unit 2 Lect 1 Program StructureDocument14 pagesUnit 2 Lect 1 Program StructureManav JainNo ratings yet
- Spring and Shock AbsorberDocument16 pagesSpring and Shock AbsorberAzim AzlanNo ratings yet
- Personalizing Dialogue Agents: I Have A Dog, Do You Have Pets Too?Document16 pagesPersonalizing Dialogue Agents: I Have A Dog, Do You Have Pets Too?Laksh KumarNo ratings yet
- Exercises 2.1: Limits From GraphsDocument4 pagesExercises 2.1: Limits From Graphsसौरव डेNo ratings yet
- Siae Microelettronica Alc User Manual - Mn00142e-007Document234 pagesSiae Microelettronica Alc User Manual - Mn00142e-007rubic3330% (1)
- Work During Summer PeriodDocument2 pagesWork During Summer PeriodYanaNo ratings yet
- Project DoordarshanDocument16 pagesProject DoordarshanSanjeet ShashiNo ratings yet
- PCG Open Access Library Survey 2014Document13 pagesPCG Open Access Library Survey 2014Elefteria KoseoglouNo ratings yet
- Filtro Canastillo FMCDocument4 pagesFiltro Canastillo FMCCristian Rodrigo Gonzalez SoteloNo ratings yet