Download as pdf or txt
You might also like
- Astm A370 2020Document50 pagesAstm A370 2020امين100% (1)
- Quarter 3 - Module 1-W1&W2: Computer Systems Servicing (CSS)Document18 pagesQuarter 3 - Module 1-W1&W2: Computer Systems Servicing (CSS)AC Balio100% (5)
- 04-HW 04 Soln Face PDFDocument12 pages04-HW 04 Soln Face PDFBryan DavisNo ratings yet
- Antenna Analysis and Design Chapter 4Document19 pagesAntenna Analysis and Design Chapter 4SisayNo ratings yet
- Transform: of Technique For For Which - For Which That ofDocument119 pagesTransform: of Technique For For Which - For Which That ofsk abdullahNo ratings yet
- Z TansformDocument65 pagesZ TansformThe Aviator00No ratings yet
- Design A RC Coupled CE Transistor AmplifierDocument7 pagesDesign A RC Coupled CE Transistor AmplifierSudeep Nayak100% (1)
- Section 12-1 Analog-to-Digital Conversion: SolutionDocument4 pagesSection 12-1 Analog-to-Digital Conversion: SolutionsalmanNo ratings yet
- Three PhaseDocument9 pagesThree Phaseuama87No ratings yet
- Magnetically Coupled Circuits PDFDocument21 pagesMagnetically Coupled Circuits PDFOrlando100% (1)
- D-T Signals Relation Between DFT, DTFT, & CTFTDocument22 pagesD-T Signals Relation Between DFT, DTFT, & CTFThamza abdo mohamoudNo ratings yet
- Transmission LinesDocument77 pagesTransmission LinesMaraMendozaNo ratings yet
- DSP Lab ReportDocument26 pagesDSP Lab ReportPramod SnkrNo ratings yet
- Chapter 8 Manual OgataDocument53 pagesChapter 8 Manual OgataKalim UllahNo ratings yet
- Lecture 20 Boundary Conditions IDocument14 pagesLecture 20 Boundary Conditions IZuha FatimaNo ratings yet
- Lyapunov Stability AnalysisDocument17 pagesLyapunov Stability AnalysisumeshgangwarNo ratings yet
- Qus., Bank With Ans., Part A & B PDFDocument52 pagesQus., Bank With Ans., Part A & B PDFBala Sreedharan100% (1)
- Z TransformDocument29 pagesZ TransformRamadhuraiNo ratings yet
- EEEB123 - Chapter 9 Sinusoids and PhasorsDocument79 pagesEEEB123 - Chapter 9 Sinusoids and PhasorsMuhammad Umair Felix0% (1)
- BEE4413 Chapter 7Document20 pagesBEE4413 Chapter 7NUrul Aqilah MusNo ratings yet
- Formulas in Transmission LinesDocument4 pagesFormulas in Transmission LinesAngelo Job ParadoNo ratings yet
- 06-HW 06 Face PDFDocument1 page06-HW 06 Face PDFBryan DavisNo ratings yet
- To Design An Adaptive Channel Equalizer Using MATLABDocument43 pagesTo Design An Adaptive Channel Equalizer Using MATLABAngel Pushpa100% (1)
- Discrete Time Fourier Transform (DTFT) & Discrete Fourier TransformDocument41 pagesDiscrete Time Fourier Transform (DTFT) & Discrete Fourier TransformekmemonNo ratings yet
- Wave FexDocument22 pagesWave Fexgeremu100% (1)
- Solns ch2Document17 pagesSolns ch2Soumitra BhowmickNo ratings yet
- Applied Electronics II (Chapter 4)Document34 pagesApplied Electronics II (Chapter 4)Ermias MesfinNo ratings yet
- Z-Transform Examples PDFDocument26 pagesZ-Transform Examples PDFchardo santos0% (1)
- Electrical Network, Graph Theory, Incidence Matrix, TopologyDocument53 pagesElectrical Network, Graph Theory, Incidence Matrix, TopologyJoyprakash Lairenlakpam100% (1)
- Assignmnet 02 RevisedDocument3 pagesAssignmnet 02 RevisedBilal Ayub100% (1)
- Practical Signal ProcessingDocument30 pagesPractical Signal ProcessingLokender TiwariNo ratings yet
- From Unimap, Malaysia Louisiana State U HK City U Eastern Washington UDocument31 pagesFrom Unimap, Malaysia Louisiana State U HK City U Eastern Washington UKingLokeshNo ratings yet
- Assignment2 SolutionDocument22 pagesAssignment2 Solutionyamen.nasser7No ratings yet
- Network Analysis: Sharique Najam MuzaffarDocument32 pagesNetwork Analysis: Sharique Najam Muzaffarmanzur_a_m100% (1)
- Chapter 9 Frequency Response of BJT & MosfetDocument54 pagesChapter 9 Frequency Response of BJT & Mosfetshubhankar palNo ratings yet
- Signal Flow Graph (Diajarkan)Document57 pagesSignal Flow Graph (Diajarkan)Muhammad DienullahNo ratings yet
- Skin Effect and Dielectric Loss Models of Power Cables 04784562Document8 pagesSkin Effect and Dielectric Loss Models of Power Cables 04784562Gilberto Mejía100% (1)
- CH 63 PDFDocument26 pagesCH 63 PDFJawad Ul Hassan ShahNo ratings yet
- Analog Electronics-2 PDFDocument20 pagesAnalog Electronics-2 PDFAbhinav JangraNo ratings yet
- Chapter 3 PDFDocument32 pagesChapter 3 PDFEndalew kassahunNo ratings yet
- MATLAB Programming Tutorial - Version 05-: Electromagnetic Fields Theory (BEE3113)Document32 pagesMATLAB Programming Tutorial - Version 05-: Electromagnetic Fields Theory (BEE3113)Johnjoseph Vera100% (1)
- IntegratorDocument38 pagesIntegratorSyed AshmadNo ratings yet
- Analysis Using Laplace Function 3Document33 pagesAnalysis Using Laplace Function 3hafidahnsNo ratings yet
- Ch2 Wiener FiltersDocument80 pagesCh2 Wiener Filtersashutosh199625No ratings yet
- Digital Signal ProcessingDocument23 pagesDigital Signal ProcessingSanjay PalNo ratings yet
- Wavelet TransformDocument41 pagesWavelet Transformarshi khan100% (1)
- Measurments Sheet 4 AnswersDocument5 pagesMeasurments Sheet 4 Answersahmed gamalNo ratings yet
- Z TransformDocument20 pagesZ TransformMxaz MyzxNo ratings yet
- BE MWE MaterialDocument81 pagesBE MWE Materialsravan_4510% (1)
- Questions & Answers On Vector Analysis and ApplicationsDocument8 pagesQuestions & Answers On Vector Analysis and Applicationskibrom atsbha100% (1)
- Linear Convolution Program in C Language Using CCStudioDocument3 pagesLinear Convolution Program in C Language Using CCStudiosk_ebook80% (5)
- Discrete - Time System and AnalysisDocument113 pagesDiscrete - Time System and Analysisapaijas0% (2)
- Small Signal Model MOSFETDocument8 pagesSmall Signal Model MOSFETRAHUL100% (1)
- Solution To The Drill Problems of Chapter 01 (Engineering Electromagnetics, Hayt, A.Buck 7th Ed) BEE 4A, 4B & 4C D1.1 (A) - (B)Document2 pagesSolution To The Drill Problems of Chapter 01 (Engineering Electromagnetics, Hayt, A.Buck 7th Ed) BEE 4A, 4B & 4C D1.1 (A) - (B)sajjadNo ratings yet
- AC Network Theorems: Prepared By: Karthik Chandran Pillai IV Sem, EEE (B)Document22 pagesAC Network Theorems: Prepared By: Karthik Chandran Pillai IV Sem, EEE (B)hodeegits9526100% (1)
- Digital Signal Processing 2/ Advanced Digital Signal Processing Lecture 7, Z-Transform, FiltersDocument21 pagesDigital Signal Processing 2/ Advanced Digital Signal Processing Lecture 7, Z-Transform, FiltersHà SơnNo ratings yet
- Inverse Z-Transforms and Difference Equations 1 PreliminariesDocument14 pagesInverse Z-Transforms and Difference Equations 1 PreliminariesvanessacavalcantiiNo ratings yet
- Unit 2 - Digital Signal Processing - WWW - Rgpvnotes.inDocument13 pagesUnit 2 - Digital Signal Processing - WWW - Rgpvnotes.inRohit kumarNo ratings yet
- Topic12 Z TransformDocument9 pagesTopic12 Z TransformAkshatNo ratings yet
- dsp5 9Document48 pagesdsp5 9Mohammed YounisNo ratings yet
- PolarDocument8 pagesPolarMurali KNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Quiz 08ode Runge4th SolutionDocument15 pagesQuiz 08ode Runge4th SolutionGnanarajNo ratings yet
- Assignment I Last Date 02-09-2020Document1 pageAssignment I Last Date 02-09-2020GnanarajNo ratings yet
- An Autonomous Institution, Permanently Affiliated To Anna University, ChennaiDocument3 pagesAn Autonomous Institution, Permanently Affiliated To Anna University, ChennaiGnanarajNo ratings yet
- MCQ 18ce310 Fourier Series and Partial Differential EquationsDocument8 pagesMCQ 18ce310 Fourier Series and Partial Differential EquationsGnanarajNo ratings yet
- f (t) ω=1 f (t) dt f (t) Sint dtDocument3 pagesf (t) ω=1 f (t) dt f (t) Sint dtGnanarajNo ratings yet
- Unit I Unit I Unit II Unit II Unit III Unit III Unit IV Unit IV Unit V Unit VDocument2 pagesUnit I Unit I Unit II Unit II Unit III Unit III Unit IV Unit IV Unit V Unit VGnanarajNo ratings yet
- II SEMSTER BOS Approved SyllabusDocument59 pagesII SEMSTER BOS Approved SyllabusGnanarajNo ratings yet
- Web Practice Exam 1Document11 pagesWeb Practice Exam 1Gnanaraj100% (1)
- J"F: Oy::: 14EF210 14EE310 - +uDocument3 pagesJ"F: Oy::: 14EF210 14EE310 - +uGnanarajNo ratings yet
- Multiple-Choice Test Newton's Divided Difference Polynomial Method InterpolationDocument7 pagesMultiple-Choice Test Newton's Divided Difference Polynomial Method InterpolationGnanarajNo ratings yet
- Fourier Transforms Solved - Two MarksDocument9 pagesFourier Transforms Solved - Two MarksGnanaraj100% (1)
- Linear Regression Using PythonDocument15 pagesLinear Regression Using PythonGnanarajNo ratings yet
- Csit Pre-Gate 2019Document56 pagesCsit Pre-Gate 2019GnanarajNo ratings yet
- Test of Hyp Formula & ProbsDocument12 pagesTest of Hyp Formula & ProbsGnanarajNo ratings yet
- Title of Project:-Military Hospital Report Management SystemDocument4 pagesTitle of Project:-Military Hospital Report Management SystemAkbar AliNo ratings yet
- HCI 2008 Promo W SolutionDocument12 pagesHCI 2008 Promo W SolutionMichael CheeNo ratings yet
- Task 6 - Leave Type Safety ValveDocument3 pagesTask 6 - Leave Type Safety ValveTeguh RaharjoNo ratings yet
- Electrical Circuit Lab ManualDocument38 pagesElectrical Circuit Lab Manualecessec67% (3)
- Iklan Transtv - Ani, Adel, Vinda - Kelas ADocument9 pagesIklan Transtv - Ani, Adel, Vinda - Kelas ANur JamilaNo ratings yet
- Protocols For Public-Key CryptosystemsDocument13 pagesProtocols For Public-Key CryptosystemsIvo LemosNo ratings yet
- 12feb Quickref Views enDocument148 pages12feb Quickref Views enprakash2709No ratings yet
- Chapter 6: The Legal and Political Environment of Global BusinessDocument25 pagesChapter 6: The Legal and Political Environment of Global BusinessMaxineNo ratings yet
- Western Mindanao State University College of Engineering-College Student Council Acknowledgement Form and Waiver of Fees For 1 SemesterDocument4 pagesWestern Mindanao State University College of Engineering-College Student Council Acknowledgement Form and Waiver of Fees For 1 SemesterMaria Julia DenustaNo ratings yet
- Latest Volleyball News From The NCAA and NAIADocument3 pagesLatest Volleyball News From The NCAA and NAIAFernan RomeroNo ratings yet
- The Little Book of Breaks 1840241519 PDFDocument61 pagesThe Little Book of Breaks 1840241519 PDFksrbhaskarNo ratings yet
- Springer Nature Latex TemplateDocument13 pagesSpringer Nature Latex TemplateAndres FloresNo ratings yet
- About BITS CmdletsDocument3 pagesAbout BITS CmdletsvashsauNo ratings yet
- Entry Level Linguist ResumeDocument4 pagesEntry Level Linguist Resumejbzhnbyhf100% (1)
- Unhappy Meals - Michael Pollan - The New York TimesDocument25 pagesUnhappy Meals - Michael Pollan - The New York TimesBob0% (1)
- Philippine Air Force CAS Aircraft Bidding DocumentsDocument151 pagesPhilippine Air Force CAS Aircraft Bidding DocumentsfuccioniNo ratings yet
- SPECALOG Hitachi Ex2600-6Document7 pagesSPECALOG Hitachi Ex2600-6andrefilthNo ratings yet
- Steffes 5100 Tech Data SheetDocument4 pagesSteffes 5100 Tech Data SheetcringsredNo ratings yet
- ADM Marketing Module 4 Lesson 4 Promotional ToolsDocument20 pagesADM Marketing Module 4 Lesson 4 Promotional ToolsMariel Santos75% (8)
- Shareholder Value Analysis FrameworkDocument9 pagesShareholder Value Analysis Frameworkashish.the7353No ratings yet
- UNHCR Hygiene Promotion GuidelinesDocument112 pagesUNHCR Hygiene Promotion GuidelinesBrandie ShackelfordNo ratings yet
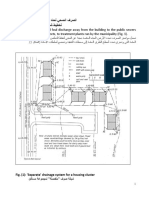
- Drainage Below GroundDocument5 pagesDrainage Below GroundmisharyNo ratings yet
- Jyotish - Hindu Panchangam & MuhurtasDocument40 pagesJyotish - Hindu Panchangam & MuhurtasSamir Kadiya100% (1)
- How To Improve Battery Life of Your Galaxy Note 10 and Note 10Document18 pagesHow To Improve Battery Life of Your Galaxy Note 10 and Note 10rainpcruzNo ratings yet
- Health The Basics 11th Edition Donatelle Test BankDocument19 pagesHealth The Basics 11th Edition Donatelle Test BankJosephWilliamsinaom100% (6)
- 3I Grading Rubric For Output PresentationDocument2 pages3I Grading Rubric For Output PresentationBinibining Michelle CenizaNo ratings yet
- Gcrouch@wsu - Edu Rmancini@wsu - Edu Andreakl@wsu - Edu: Groups/chem.345Document5 pagesGcrouch@wsu - Edu Rmancini@wsu - Edu Andreakl@wsu - Edu: Groups/chem.345Daniel McDermottNo ratings yet
- SK Abyip - San Felipe Cy 2023Document9 pagesSK Abyip - San Felipe Cy 2023Cazy Mel EugenioNo ratings yet