Download as docx, pdf, or txt
You might also like
- Intellect Cards Capability v1.2Document111 pagesIntellect Cards Capability v1.2paryushanjain100% (1)
- Mini CNC Machine Project ReportDocument32 pagesMini CNC Machine Project ReportNaimish Sukhadeve83% (6)
- Implementing A Source Synchronous Interface v2.0Document47 pagesImplementing A Source Synchronous Interface v2.0Gautham PopuriNo ratings yet
- Pre-Standard: Publicly Available SpecificationDocument20 pagesPre-Standard: Publicly Available SpecificationNalex GeeNo ratings yet
- Zynq 7020Document4 pagesZynq 7020NGUYỄN HOÀNG LINHNo ratings yet
- OrCAD Altium Migration Guide PDFDocument8 pagesOrCAD Altium Migration Guide PDFElafanNo ratings yet
- PATA/IDE and Sata InterfaceDocument12 pagesPATA/IDE and Sata InterfaceBu Sidray AcunaNo ratings yet
- VHDL Bram BromDocument9 pagesVHDL Bram BromGmit MandyaNo ratings yet
- LPC Xpresso SchematicDocument5 pagesLPC Xpresso SchematicHội Ngô VănNo ratings yet
- MCB2300 CanDocument14 pagesMCB2300 CanMichaelNo ratings yet
- Unit-5: Types of Buses in Computer ArchitectureDocument19 pagesUnit-5: Types of Buses in Computer ArchitectureEphrage GurureNo ratings yet
- T89C51 Training Board - V5Document44 pagesT89C51 Training Board - V5davidegrimaNo ratings yet
- Fpga Based System DesignDocument30 pagesFpga Based System DesignKrishna Kumar100% (1)
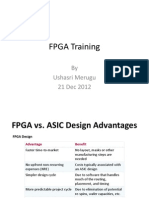
- FPGA Training: by Ushasri Merugu 21 Dec 2012Document5 pagesFPGA Training: by Ushasri Merugu 21 Dec 2012rkguptha_514369372No ratings yet
- How Microprocessors Work 23Document13 pagesHow Microprocessors Work 23nafeesNo ratings yet
- Placement RequirementDocument71 pagesPlacement RequirementRahul RulzzNo ratings yet
- Ap7202-Asic and FpgaDocument12 pagesAp7202-Asic and FpgaMOTHI.R MEC-AP/ECENo ratings yet
- SPI I2C Interface AnDocument13 pagesSPI I2C Interface AnNivin PaulNo ratings yet
- PCB Presentation DraftDocument19 pagesPCB Presentation Draftsanjay sharma100% (1)
- Introduction To VLSI DesignDocument20 pagesIntroduction To VLSI DesignRoshdy AbdelRassoulNo ratings yet
- ARM System-On-chip Architecture 2nd Edition Book RDocument2 pagesARM System-On-chip Architecture 2nd Edition Book Rdarek RaceNo ratings yet
- 34 Top Electronic Device and Circuits Lab Viva Questions and Answers Electronic Device and Circuits Lab Viva QuestionsDocument7 pages34 Top Electronic Device and Circuits Lab Viva Questions and Answers Electronic Device and Circuits Lab Viva QuestionsDINESHNo ratings yet
- Sequential Digital Circuits: Dr. Costas Kyriacou and Dr. Konstantinos TatasDocument22 pagesSequential Digital Circuits: Dr. Costas Kyriacou and Dr. Konstantinos Tatasvikramkolanu100% (2)
- Palestra 4 Abram BelkDocument143 pagesPalestra 4 Abram BelkThiago Rafael PrettoNo ratings yet
- FPGA ArchitectureDocument39 pagesFPGA ArchitectureeeshgargNo ratings yet
- MPMC Digtal NotesDocument129 pagesMPMC Digtal NotesMr.K Sanath KumarNo ratings yet
- How To Use Composite Current Source Modeling For Crosstalk Noise AnalysisDocument12 pagesHow To Use Composite Current Source Modeling For Crosstalk Noise AnalysisStudentNo ratings yet
- 2D NMR SpectrosDocument12 pages2D NMR Spectrossatheeshpharma6No ratings yet
- CNC Drilling Machine For Printed Circuit BoardDocument4 pagesCNC Drilling Machine For Printed Circuit BoardEditor IJTSRDNo ratings yet
- Pic16f84a PDFDocument88 pagesPic16f84a PDFBenjamin Michael LandisNo ratings yet
- 15EC62 Arm MC and Es Course File 2018Document10 pages15EC62 Arm MC and Es Course File 2018Nikhil KulkarniNo ratings yet
- DRAM Lecture2Document32 pagesDRAM Lecture2santanu_sinha87No ratings yet
- Sprint Layout - The Ultimate Tutorial and ExperienceDocument17 pagesSprint Layout - The Ultimate Tutorial and ExperiencePatrick JeanNo ratings yet
- Avr TimersDocument21 pagesAvr TimersfarcasiunNo ratings yet
- Architecture of FPGAs and CPLDS: A TutorialDocument41 pagesArchitecture of FPGAs and CPLDS: A Tutorialgongster100% (5)
- Vlsi - Physical DesignDocument27 pagesVlsi - Physical DesignVimal RajNo ratings yet
- 3D IcDocument37 pages3D IcdevaNo ratings yet
- Module-2, Session-1 HDL Design Concepts and RTL Coding With VHDLDocument7 pagesModule-2, Session-1 HDL Design Concepts and RTL Coding With VHDLPraveen KumarNo ratings yet
- Avr Atmega128 Microcontroller C Programming and 7811242451Document1 pageAvr Atmega128 Microcontroller C Programming and 7811242451Recta TidarNo ratings yet
- ArduinoDocument44 pagesArduinojocansino4496No ratings yet
- Arduino Uno Start Document 5 2022Document14 pagesArduino Uno Start Document 5 2022Eashvar SrinivasanNo ratings yet
- 28Nm and Below, New Path and Beyond: Danny Rittman PHDDocument15 pages28Nm and Below, New Path and Beyond: Danny Rittman PHDAbhesh Kumar TripathiNo ratings yet
- Intel SATA ControllerDocument59 pagesIntel SATA ControlleruserscrybdNo ratings yet
- Altera FLEX 8000 Block Diagram (Review) Altera FLEX 10K Block Diagram (Review)Document4 pagesAltera FLEX 8000 Block Diagram (Review) Altera FLEX 10K Block Diagram (Review)Rohith RajNo ratings yet
- FPGA Lect3Document93 pagesFPGA Lect3Amit JoshiNo ratings yet
- Application-Specific Integrated Circuit ASIC A Complete GuideFrom EverandApplication-Specific Integrated Circuit ASIC A Complete GuideNo ratings yet
- Digital Electronics 2: Sequential and Arithmetic Logic CircuitsFrom EverandDigital Electronics 2: Sequential and Arithmetic Logic CircuitsRating: 5 out of 5 stars5/5 (1)
- 273-Article Text-474-1-10-20171230Document5 pages273-Article Text-474-1-10-20171230Jinsha CNo ratings yet
- Final Report 5th SemDocument26 pagesFinal Report 5th SemHirokjyoti KalitaNo ratings yet
- Design Consideration and Hardware Components of The SystemDocument8 pagesDesign Consideration and Hardware Components of The SystemKyaw SoeNo ratings yet
- DC Motor Speed Control by AndroidDocument8 pagesDC Motor Speed Control by AndroidNikhil GaikwadNo ratings yet
- ArduinoDocument19 pagesArduinoAbiral BharillNo ratings yet
- Memo To Users IBM I 7.1Document74 pagesMemo To Users IBM I 7.1Anonymous c1oc6LeRNo ratings yet
- Temi Center Users GuideDocument37 pagesTemi Center Users Guidethiago.camposNo ratings yet
- Business: Read The Passage and Answer The Questions. The Just in Time MethodDocument3 pagesBusiness: Read The Passage and Answer The Questions. The Just in Time MethodJaisonEnriqueSabogalGallego100% (1)
- AFCEA New Horizons FINAL No VideoDocument11 pagesAFCEA New Horizons FINAL No VideoEduardo Weiser100% (2)
- Catálogo Cancelería de Aluminio PDF by Grupo Tecnovidrio - IssuuDocument1 pageCatálogo Cancelería de Aluminio PDF by Grupo Tecnovidrio - IssuuJavier Ramos HernandezNo ratings yet
- Reserved Keywords in Excel VBADocument4 pagesReserved Keywords in Excel VBAAnwer RazzaqNo ratings yet
- GM DC v1 1 (Existing DC)Document15 pagesGM DC v1 1 (Existing DC)SANTANU DASNo ratings yet
- Power Plant and Calculations - Power Plant Equipments Standard Operating Procedures (SOP)Document7 pagesPower Plant and Calculations - Power Plant Equipments Standard Operating Procedures (SOP)RajeshNo ratings yet
- TAB 3 - ATMS Software Design Specifications v1.0.0Document38 pagesTAB 3 - ATMS Software Design Specifications v1.0.0MahadiNo ratings yet
- Oracle CloudDocument34 pagesOracle Cloudlakshmi narayanaNo ratings yet
- Who Invented The Computer?: Charles Babbage and The Analytical EngineDocument3 pagesWho Invented The Computer?: Charles Babbage and The Analytical EngineMotivator SinghNo ratings yet
- AD NDS SMB User AuthenticationDocument25 pagesAD NDS SMB User AuthenticationGustavo SiqueiraNo ratings yet
- Mil ReviewerDocument5 pagesMil Revieweranon_893182295No ratings yet
- MP EcogosoftwarepackageaDocument68 pagesMP EcogosoftwarepackageaprasadNo ratings yet
- Atess Hps30 - 150 DatasheetDocument2 pagesAtess Hps30 - 150 Datasheetdashmaba02No ratings yet
- Caterpillar Air Filter Pehp9013-03Document2 pagesCaterpillar Air Filter Pehp9013-03Parinpa Ketar100% (1)
- Santosh Kumar Mahatha: Career ObjectiveDocument1 pageSantosh Kumar Mahatha: Career ObjectiveSantosh MahathaNo ratings yet
- Axyz Toolpath Software Introduction Address Plate 1Document13 pagesAxyz Toolpath Software Introduction Address Plate 1RadoNo ratings yet
- Machine Room Less Elevator - Elevator WikiDocument6 pagesMachine Room Less Elevator - Elevator WikiptmetromediaNo ratings yet
- National Egovernance Services Delivery AssessmentDocument8 pagesNational Egovernance Services Delivery AssessmentRohini TiwariNo ratings yet
- RDSO 2017 EL SPEC 0126 Rev 0Document26 pagesRDSO 2017 EL SPEC 0126 Rev 0lingarajanNo ratings yet
- Wi-Fi and SD Card Disable Tool - Process GuideDocument4 pagesWi-Fi and SD Card Disable Tool - Process GuidemonmadNo ratings yet
- IIITA-Allahabad Contact DetailsDocument5 pagesIIITA-Allahabad Contact DetailsbhuvneshNo ratings yet
- Iei Pe MC PDFDocument3 pagesIei Pe MC PDFSANKAR SIVANNo ratings yet
- 57 Ways To Get Traffic To Your WebsiteDocument75 pages57 Ways To Get Traffic To Your WebsiteDeeJNo ratings yet
- DEFCON 22 Lucas Morris Michael McAtee ShareEnum We Wrapped SambaDocument23 pagesDEFCON 22 Lucas Morris Michael McAtee ShareEnum We Wrapped SambaSudhanshu Shekhar SharmaNo ratings yet
- PresentationDocument33 pagesPresentationYoftahiNo ratings yet
- Design and Analyses of Car Model by CFD SoftwareDocument2 pagesDesign and Analyses of Car Model by CFD SoftwareKrishan KamtaNo ratings yet