Download as pdf or txt
You might also like
- Defect Catalogue - Galva .Document45 pagesDefect Catalogue - Galva .Suvro ChakrabortyNo ratings yet
- Mini CNC Machine Project ReportDocument32 pagesMini CNC Machine Project ReportNaimish Sukhadeve83% (6)
- Speed of Control of Motor Arduino Matlab Simulation PDFDocument10 pagesSpeed of Control of Motor Arduino Matlab Simulation PDFvince kafuaNo ratings yet
- Speed Control of Three Phase Induction Motor by AurduinoDocument39 pagesSpeed Control of Three Phase Induction Motor by AurduinoVivek Saikorian100% (3)
- Botany LAB MANGO AND LEAVESDocument15 pagesBotany LAB MANGO AND LEAVESEPHRAIM JOASH ABEJO GAGANTINGNo ratings yet
- IJCRT23A5366Document5 pagesIJCRT23A5366sharanravi2004No ratings yet
- Synopsis PPT 4Document7 pagesSynopsis PPT 4Appu SpecialNo ratings yet
- CNC by SourabhDocument7 pagesCNC by SourabhsaurabhNo ratings yet
- 21-06-2021-1624264403-6-.-2. Engg - Voltage Based Control of Induction Motor Using Advanced Voice Recognition & Command SystemDocument6 pages21-06-2021-1624264403-6-.-2. Engg - Voltage Based Control of Induction Motor Using Advanced Voice Recognition & Command SystemImpact JournalsNo ratings yet
- A Real Time Novel Technique For Controlling CNC SystemDocument9 pagesA Real Time Novel Technique For Controlling CNC SystemakashlogicNo ratings yet
- Bluetooth Controlled Door Lock SystemDocument15 pagesBluetooth Controlled Door Lock SystemShivam RajgorNo ratings yet
- CNC Machine Based On Laser Engraver Using Arduino UNODocument4 pagesCNC Machine Based On Laser Engraver Using Arduino UNOIJSTE100% (1)
- ArduinoDocument19 pagesArduinoAbiral BharillNo ratings yet
- Arduino - Servo MotorDocument3 pagesArduino - Servo Motorꀸꃅꋪꀎᐯ KumarNo ratings yet
- ECFBCK1L - Lab03 - Group 4Document7 pagesECFBCK1L - Lab03 - Group 4Hannah VisitacionNo ratings yet
- Lab 3Document6 pagesLab 3Vu LeNo ratings yet
- Bluetooth ControlledDocument15 pagesBluetooth ControlledShivam RajgorNo ratings yet
- Design and Analysis of Automatic ForkliftDocument6 pagesDesign and Analysis of Automatic ForkliftIJRASETPublicationsNo ratings yet
- IJCRT2207414 Mini Project Reasearch PaperDocument10 pagesIJCRT2207414 Mini Project Reasearch PaperHimanshu KumarNo ratings yet
- Arduino 3D Wire Bending Machine: Nettur Technical Training FoundationDocument23 pagesArduino 3D Wire Bending Machine: Nettur Technical Training FoundationManoj KumarNo ratings yet
- Design and Fabrication of Stepper Motor Control Mechanism Using ArduinoDocument31 pagesDesign and Fabrication of Stepper Motor Control Mechanism Using ArduinoSusanta MardunnyaNo ratings yet
- DC Motor Speed Control With Feedback Monitor Based On C# ApplicationDocument4 pagesDC Motor Speed Control With Feedback Monitor Based On C# ApplicationesatjournalsNo ratings yet
- DC Motor Speed Control System With PWM Pulse Width 1j1zq05vDocument6 pagesDC Motor Speed Control System With PWM Pulse Width 1j1zq05vupadhyayshikha.2398No ratings yet
- FinalDocument25 pagesFinaljiggar agarwal0% (1)
- Automatic Speed and Torque Monitoring in Induction Motors Using Zigbee and SmsDocument6 pagesAutomatic Speed and Torque Monitoring in Induction Motors Using Zigbee and SmsRaghul RamasamyNo ratings yet
- CNC PlotterDocument12 pagesCNC PlotterYussuf SherifNo ratings yet
- Mechatronics Project PDFDocument7 pagesMechatronics Project PDFTrived DoijodNo ratings yet
- Digital Tachometer Using AurdinoDocument2 pagesDigital Tachometer Using AurdinoEditor IJTSRDNo ratings yet
- Designing A PC Oscilloscope Using FreeduinoDocument11 pagesDesigning A PC Oscilloscope Using FreeduinodiearzNo ratings yet
- 273-Article Text-474-1-10-20171230Document5 pages273-Article Text-474-1-10-20171230Jinsha CNo ratings yet
- Servo Encoder LabDocument8 pagesServo Encoder LabGoran MiljkovicNo ratings yet
- WWW - Circuito.io/blog/arduino-Uno-Pinout/: Julie Truong ISM-1 PeriodDocument3 pagesWWW - Circuito.io/blog/arduino-Uno-Pinout/: Julie Truong ISM-1 Periodapi-479447377No ratings yet
- Teaching 554 13809 1592320288 1Document19 pagesTeaching 554 13809 1592320288 1HARSHAVARDHAN DORANo ratings yet
- Teaching 554 13809 1592320288 1Document19 pagesTeaching 554 13809 1592320288 1tashimaziofa42No ratings yet
- BLDC Sinusoidal ControlDocument6 pagesBLDC Sinusoidal ControlOctavian MîrţiNo ratings yet
- Arduino ppt-1Document25 pagesArduino ppt-1Aman NaikyaNo ratings yet
- Speed Control of DC Motor by Various MethodsDocument5 pagesSpeed Control of DC Motor by Various MethodsVIVA-TECH IJRINo ratings yet
- Research Paper Servo MotorDocument6 pagesResearch Paper Servo Motorc9rz4vrm100% (1)
- Automatic Railway Gate Control System Using Arduino Uno PresentationDocument20 pagesAutomatic Railway Gate Control System Using Arduino Uno PresentationRio Martin100% (1)
- Predictive Vehicle MaintainenceDocument27 pagesPredictive Vehicle MaintainenceStuti SinghNo ratings yet
- Automobile Dashboard Integration With IOT Google AssistanceDocument17 pagesAutomobile Dashboard Integration With IOT Google AssistanceaaNo ratings yet
- Obatical Observation CarDocument33 pagesObatical Observation CarAnushka SinghNo ratings yet
- Ie BusDocument92 pagesIe BusMino MaraNo ratings yet
- DC Motor Speed Control by AndroidDocument8 pagesDC Motor Speed Control by AndroidNikhil GaikwadNo ratings yet
- Smart Blinds System Using LDRDocument7 pagesSmart Blinds System Using LDRSyed Waqas HussainNo ratings yet
- ZigbeebaseddcmotorsremotemonitoringandcontrolDocument21 pagesZigbeebaseddcmotorsremotemonitoringandcontrolSiva RanjaniNo ratings yet
- Automatic Mini CNC Machine For PCB Drawing and DrillingDocument5 pagesAutomatic Mini CNC Machine For PCB Drawing and DrillingSaifulla ShariffNo ratings yet
- 13 Phys DR Hla Htay Win - LectDocument11 pages13 Phys DR Hla Htay Win - LectPanuphong NNo ratings yet
- Hardware Implementation of A Single Phase InverterDocument4 pagesHardware Implementation of A Single Phase InverterseventhsensegroupNo ratings yet
- Report FinaleDocument16 pagesReport Finalewtpqk87nxcNo ratings yet
- 2B Mini Project Report 22-23 Arduino Based Tachometer 4 PDFDocument18 pages2B Mini Project Report 22-23 Arduino Based Tachometer 4 PDF10SHARMA SUMIT RAMADHINNo ratings yet
- Report BibilographDocument7 pagesReport BibilographSuhas M AngadiNo ratings yet
- Speed and Control of DC Motors PDF BookDocument12 pagesSpeed and Control of DC Motors PDF BookakylpuMENo ratings yet
- EM Project Report - Rugaya - TaggedDocument13 pagesEM Project Report - Rugaya - Taggedmomosasahaha34No ratings yet
- Design and Implementation of A Digital TachometerDocument3 pagesDesign and Implementation of A Digital TachometerInnovative Research Publications0% (1)
- Mini Project 2nd YearDocument26 pagesMini Project 2nd YearChief SachinNo ratings yet
- Iot Based Weather Monitoring SystemDocument23 pagesIot Based Weather Monitoring Systemchaudharitush313No ratings yet
- Venu PKDocument9 pagesVenu PKVenu Venupk1431No ratings yet
- 32 Power NCDocument10 pages32 Power NCArnold RosenbergNo ratings yet
- Servo Motor 1Document3 pagesServo Motor 1Amin ShaikNo ratings yet
- Wireless Speed Control of DC Motor Using PWM and UARTDocument3 pagesWireless Speed Control of DC Motor Using PWM and UARTElins Journal100% (1)
- Vector XIIDocument2 pagesVector XIIShreeNo ratings yet
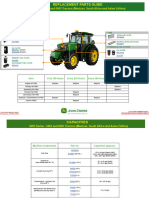
- 6003 Series 6403 and 6603 Tractors Mexico South Africa and Asian Edition Replacement Parts GuideDocument3 pages6003 Series 6403 and 6603 Tractors Mexico South Africa and Asian Edition Replacement Parts GuidePedro ValerioNo ratings yet
- Uwex 722 C Underwater Metal Detector: Operating InstructionsDocument20 pagesUwex 722 C Underwater Metal Detector: Operating InstructionsutvrdaNo ratings yet
- Quality Control of Sterile Products: (Ms. Riffat)Document21 pagesQuality Control of Sterile Products: (Ms. Riffat)Khan NehalNo ratings yet
- The Montessori MethodDocument183 pagesThe Montessori MethodMaur MaccNo ratings yet
- Four Quadrant OperationDocument6 pagesFour Quadrant OperationMohammed OvaizNo ratings yet
- Design of Hydraulic Structure - 1Document16 pagesDesign of Hydraulic Structure - 1aland pshtiwanNo ratings yet
- NDRRMC UPDATE Re SitreDocument31 pagesNDRRMC UPDATE Re SitreQuiapo ChurchNo ratings yet
- Jap-Motor General v1Document52 pagesJap-Motor General v1Pankaj Poonia100% (1)
- MODULE-VIII Processing Seledted Food ItemDocument8 pagesMODULE-VIII Processing Seledted Food ItemKyla Gaile MendozaNo ratings yet
- My CVDocument4 pagesMy CVSaifKhalidNo ratings yet
- Editorial Status Report - Dr. Y. Thiagarajan - JERRDocument3 pagesEditorial Status Report - Dr. Y. Thiagarajan - JERRThiaga RajanNo ratings yet
- Term 1 Term 2 April OctoberDocument9 pagesTerm 1 Term 2 April OctoberSuleiman HaqNo ratings yet
- Lubrication SystemDocument43 pagesLubrication Systemkebaman1986No ratings yet
- Bajaj Electricals Limited: Head of R & D AB Square Navi Mumbai Executive DirectorDocument2 pagesBajaj Electricals Limited: Head of R & D AB Square Navi Mumbai Executive DirectorabhijitNo ratings yet
- CSR of TI Company NotesDocument3 pagesCSR of TI Company NotesjemNo ratings yet
- Class 4 GK WorksheetDocument21 pagesClass 4 GK WorksheetJayesh Shukla0% (1)
- REC EQ ChartDocument2 pagesREC EQ ChartAntonio F.M. PalloneNo ratings yet
- Gyprock Red Book Book 3 Commercial Installation GuideDocument230 pagesGyprock Red Book Book 3 Commercial Installation GuideAznie ZyNo ratings yet
- Abstract Number: 191 Finite Element Analysis of Geotextile Reinforced Highway Embankment Using Plaxis 3DDocument13 pagesAbstract Number: 191 Finite Element Analysis of Geotextile Reinforced Highway Embankment Using Plaxis 3DAnjali SharmaNo ratings yet
- Diet Dan Olahraga Sebagai Upaya Pengendalian Kadar Gula Darah Pada Pasien Diabetes Melitus Tipe 2 Di Poliklinik Penyakit Dalam RSUD Ulin Banjarmasin Tahun 2015Document10 pagesDiet Dan Olahraga Sebagai Upaya Pengendalian Kadar Gula Darah Pada Pasien Diabetes Melitus Tipe 2 Di Poliklinik Penyakit Dalam RSUD Ulin Banjarmasin Tahun 2015Haifatul AlimahNo ratings yet
- Electricity Worksheet Physics GcseDocument5 pagesElectricity Worksheet Physics Gcsetun1123tNo ratings yet
- 10 Atypical PneumoniaDocument4 pages10 Atypical PneumoniaKevinTevesYupanquiNo ratings yet
- Engineering Data Sheet: 49187073 E 1145842 1 of 1 October 21, 2016 60HzDocument1 pageEngineering Data Sheet: 49187073 E 1145842 1 of 1 October 21, 2016 60HzGustavo VillarrealNo ratings yet
- Purgador Parker v200Document15 pagesPurgador Parker v200David Fabian Rodriguez AlvarezNo ratings yet
- 463-287. 23.09. Lap Udm Proyek Pembangunan Jalan Tol Ancol Timur - Pluit (Elevated) (Rao16 Bp05)Document18 pages463-287. 23.09. Lap Udm Proyek Pembangunan Jalan Tol Ancol Timur - Pluit (Elevated) (Rao16 Bp05)Ikan AsinNo ratings yet
- 2 1 Fg8jglt Eep Final (PM)Document1 page2 1 Fg8jglt Eep Final (PM)hyde2520015754No ratings yet
- In Vitro Population BioequivalenceDocument14 pagesIn Vitro Population BioequivalenceMetta Bodhiloka SusiloNo ratings yet