Download as pdf or txt
You might also like
- Cat C1.1 Diesel Engine Service and Workshop ManualDocument42 pagesCat C1.1 Diesel Engine Service and Workshop Manualmaq mayor100% (11)
- John Deere Tractor 4040 4240 TM1181 SM 011080 - TextDocument1,108 pagesJohn Deere Tractor 4040 4240 TM1181 SM 011080 - TextDiego Rodriguez100% (10)
- Kubota Kx91 3 Parts Sec WatDocument20 pagesKubota Kx91 3 Parts Sec Watbelinda100% (62)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
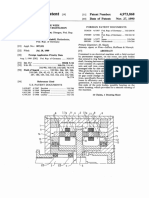
- US4503349Document6 pagesUS4503349Build ItNo ratings yet
- Us 4751486Document8 pagesUs 4751486Hidayat NurulNo ratings yet
- Us 4785300Document12 pagesUs 4785300MasoudNo ratings yet
- Generator Design StepsDocument40 pagesGenerator Design Stepsrajfab100% (1)
- 3 Phase Induction MotorDocument48 pages3 Phase Induction Motormsd183wkNo ratings yet
- (Us 2005) 6864611 Synchronous Generator For Service in Wind Power Plants, As Well As A Wind PowerDocument14 pages(Us 2005) 6864611 Synchronous Generator For Service in Wind Power Plants, As Well As A Wind PowerYesmaRofiaNo ratings yet
- EMD II UNIT 2 Design of Wound RotorDocument52 pagesEMD II UNIT 2 Design of Wound RotorAmit kumarNo ratings yet
- Steam Turbine Rotor CrackDocument11 pagesSteam Turbine Rotor Crackpoloko7100% (2)
- Modelling of Vibration in Induction MotorDocument38 pagesModelling of Vibration in Induction MotorYasi YamuNo ratings yet
- Modeling of Hysteresis Motor: Aishwarya Dhanagare, A.G.ThosarDocument8 pagesModeling of Hysteresis Motor: Aishwarya Dhanagare, A.G.ThosarLoli SyNo ratings yet
- Us 4103196Document6 pagesUs 4103196Shankar PediredlaNo ratings yet
- Fig. 10.2 Types of ControllersDocument30 pagesFig. 10.2 Types of Controllerssum8c88No ratings yet
- GER4724 Torsional Dynamics PaperDocument16 pagesGER4724 Torsional Dynamics PaperBilal AllouhNo ratings yet
- UNIT-2-Stepper MotorDocument29 pagesUNIT-2-Stepper MotorArivoli SundaramurthyNo ratings yet
- Pebn009 Sizing of Electrical Machines PDFDocument2 pagesPebn009 Sizing of Electrical Machines PDFvishiwizardNo ratings yet
- Us 4476409Document7 pagesUs 4476409Shankar PediredlaNo ratings yet
- Performance Calculation of High Temperature Superconducting Hysteresis Motor Using Finite Element MethodDocument6 pagesPerformance Calculation of High Temperature Superconducting Hysteresis Motor Using Finite Element MethodaffifaghaniNo ratings yet
- Design of SM PDFDocument23 pagesDesign of SM PDFpraveenNo ratings yet
- Novel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoDocument6 pagesNovel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoNenad Kostadinovic50% (2)
- Development of High Speed Alternator For Small Gas Turbine EngineDocument8 pagesDevelopment of High Speed Alternator For Small Gas Turbine EngineMahesh NakawalaNo ratings yet
- PCB Helical Resonator and FilterDocument7 pagesPCB Helical Resonator and FilterbaymanNo ratings yet
- Squirrel Cage Rotor TestingDocument26 pagesSquirrel Cage Rotor Testingpelom1No ratings yet
- #5 Module 5Document52 pages#5 Module 5anishdeshmukh108No ratings yet
- Symmetrical Faults Part I PDFDocument39 pagesSymmetrical Faults Part I PDFGunjan lalakiya100% (2)
- CH3 EditDocument46 pagesCH3 EditLetk ZelalemNo ratings yet
- 7.induction Motor EceDocument13 pages7.induction Motor EceB ANIL KUMARNo ratings yet
- US5040959Document9 pagesUS5040959ruchit solankiNo ratings yet
- Fig 1.1 Axial-Field Electrical MachineDocument26 pagesFig 1.1 Axial-Field Electrical MachineSafalsha BabuNo ratings yet
- Design of Electrical Machine: R.Thiyagarajan AP/EEEDocument8 pagesDesign of Electrical Machine: R.Thiyagarajan AP/EEErioNo ratings yet
- Experiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveDocument3 pagesExperiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveKristine AldayNo ratings yet
- Synchronous GeneratorDocument36 pagesSynchronous Generatorsamselvaraj100% (1)
- 3-Ph Induction MotorDocument246 pages3-Ph Induction MotorAn00pgadzilla100% (1)
- Permanent Magnet Rotor AssemblyDocument3 pagesPermanent Magnet Rotor Assemblysameer_omNo ratings yet
- Hydrofoil - US5951162Document22 pagesHydrofoil - US5951162rwtoorresdNo ratings yet
- Chapter Three Induction Machines: Electromechanical ConversionDocument67 pagesChapter Three Induction Machines: Electromechanical ConversiontsegayNo ratings yet
- Principles of Operation - How Eddy Current Separators WorkDocument2 pagesPrinciples of Operation - How Eddy Current Separators Workmarn-in2501No ratings yet
- Toyota Alternator Build Manual 1 4.3pdf PDFDocument55 pagesToyota Alternator Build Manual 1 4.3pdf PDFJohn Anderson100% (2)
- LECTURE# 22 & 23 Induction Machines FinalDocument39 pagesLECTURE# 22 & 23 Induction Machines FinalAmmara RasheedNo ratings yet
- Sinkron Motor - AtmiDocument87 pagesSinkron Motor - AtmiHaryo Probo100% (1)
- Bn-Ye Nane: N2KkntDocument4 pagesBn-Ye Nane: N2KkntMichael MurphyNo ratings yet
- Effect of SizingDocument6 pagesEffect of Sizingbavin rajNo ratings yet
- Effect of Stator Winding Temperature On Modal Test ResultsDocument10 pagesEffect of Stator Winding Temperature On Modal Test ResultsandikaubhNo ratings yet
- Edited Em-III Lecture Notes 0Document44 pagesEdited Em-III Lecture Notes 0S.ayeeshaNo ratings yet
- Torque Motor1Document4 pagesTorque Motor1pepenitoNo ratings yet
- A.C. MachineDocument32 pagesA.C. MachinehayikNo ratings yet
- IADC/SPE 128458 Asymmetric Vibration Damping Tool - Small Scale Rig Testing and Full Scale Field TestingDocument29 pagesIADC/SPE 128458 Asymmetric Vibration Damping Tool - Small Scale Rig Testing and Full Scale Field TestingGhazi MhedhbiNo ratings yet
- Electric Motor Basics: Why Are Rotors Skewed?: by Cyndi Nyberg EASA Technical Support SpecialistDocument2 pagesElectric Motor Basics: Why Are Rotors Skewed?: by Cyndi Nyberg EASA Technical Support SpecialistsebastianNo ratings yet
- Generator Field Winding Shorted Turn Detection TechnologyDocument8 pagesGenerator Field Winding Shorted Turn Detection TechnologyChandrasekar KaruppasamyNo ratings yet
- Rotor Testing Tom Bishop 2Document20 pagesRotor Testing Tom Bishop 2sameer.pawar.sspNo ratings yet
- CH 3 MachineDocument22 pagesCH 3 MachineTeshale AlemieNo ratings yet
- Construction of Alternator: Under Electrical GeneratorDocument3 pagesConstruction of Alternator: Under Electrical GeneratorPravin Hande100% (1)
- Cowes Condition AssessDocument17 pagesCowes Condition AssessMuhammad Imran NasirNo ratings yet
- STC TRS Conventional 02Document419 pagesSTC TRS Conventional 02battery sectionNo ratings yet
- Diagnosing Rotor Bar Issues With Torque and Current Signature AnalysisDocument11 pagesDiagnosing Rotor Bar Issues With Torque and Current Signature AnalysisJose Alejandro Mansutti G100% (1)
- BobiSoft Short Description 2017Document12 pagesBobiSoft Short Description 2017Masum uddin mondolNo ratings yet
- AlternatorDocument73 pagesAlternatormukeshh100% (1)
- How to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheFrom EverandHow to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheRating: 4.5 out of 5 stars4.5/5 (2)
- Linotype Manual: Giving Detailed Instructions of the Proper Adjustment and Care of the LinotypeFrom EverandLinotype Manual: Giving Detailed Instructions of the Proper Adjustment and Care of the LinotypeNo ratings yet
- Test Drive: Number of Questions: 25Document10 pagesTest Drive: Number of Questions: 25Prajjwal NegiNo ratings yet
- Number of Questions: 30: CEX-V-0264/20Document10 pagesNumber of Questions: 30: CEX-V-0264/20Prajjwal NegiNo ratings yet
- NotesDocument16 pagesNotesPrajjwal NegiNo ratings yet
- Ue179057 F.E.MDocument12 pagesUe179057 F.E.MPrajjwal NegiNo ratings yet
- Floor Cleaning RobotDocument13 pagesFloor Cleaning RobotPrajjwal NegiNo ratings yet
- Case 1 PDFDocument1 pageCase 1 PDFPrajjwal NegiNo ratings yet
- LRDI Faculty Manual PDFDocument86 pagesLRDI Faculty Manual PDFPrajjwal NegiNo ratings yet
- Prerna Negi: Course CertificateDocument1 pagePrerna Negi: Course CertificatePrajjwal NegiNo ratings yet
- Computer Aided Design CAD-IDocument67 pagesComputer Aided Design CAD-IPrajjwal Negi0% (1)
- TRAININGDocument13 pagesTRAININGPrajjwal NegiNo ratings yet
- Cad Cam Curves Notes PDFDocument8 pagesCad Cam Curves Notes PDFPrajjwal NegiNo ratings yet
- Meat SpoilageDocument4 pagesMeat SpoilagePrajjwal NegiNo ratings yet
- Vacuum Modulator: CompositionDocument12 pagesVacuum Modulator: CompositionNOJ ADNUBNo ratings yet
- Multiple Choice Questions Exam Paper For EngineeringDocument5 pagesMultiple Choice Questions Exam Paper For EngineeringmaanwarNo ratings yet
- SRI PneumaticsDocument42 pagesSRI Pneumaticsadaptive4u4527No ratings yet
- CAT - C-12 (Prefix MBL, 2KS, CPD, or 8YF) .Prefix 9SMDocument8 pagesCAT - C-12 (Prefix MBL, 2KS, CPD, or 8YF) .Prefix 9SMPhil B.No ratings yet
- Engine Power DataDocument4 pagesEngine Power DataBlack TigerNo ratings yet
- Large Engine Lubricants: © 2019 Infineum International Limited. All Rights Reserved. 2019160Document32 pagesLarge Engine Lubricants: © 2019 Infineum International Limited. All Rights Reserved. 2019160Jahmia CoralieNo ratings yet
- Deutz 912 DataDocument19 pagesDeutz 912 DataSamir Yehya100% (2)
- Anima 190fDocument38 pagesAnima 190fmihanetosNo ratings yet
- Induction MotorDocument3 pagesInduction MotorAnfield FaithfulNo ratings yet
- List Data Barang GudangDocument6 pagesList Data Barang GudangErwin SyahNo ratings yet
- Applied Thermodynamics For Marine Systems Prof. P. K. Das Department of Mechanical Engineering Indian Institute of Technology KharagpurDocument16 pagesApplied Thermodynamics For Marine Systems Prof. P. K. Das Department of Mechanical Engineering Indian Institute of Technology KharagpurTommyVercettiNo ratings yet
- Wartsila 25 Product GuideDocument138 pagesWartsila 25 Product GuideabausersNo ratings yet
- Goodyear Truck Regroove 2016Document12 pagesGoodyear Truck Regroove 2016Elmin SkuljNo ratings yet
- Creo ProjectDocument4 pagesCreo Projectk.n.v phaniNo ratings yet
- Gta38gce en 2 (8c1)Document2 pagesGta38gce en 2 (8c1)Oscar BarraganNo ratings yet
- 13.8.4.6 Stop Engine Light Did Not Illuminate: Series 60 Service ManualDocument2 pages13.8.4.6 Stop Engine Light Did Not Illuminate: Series 60 Service ManualvictoverNo ratings yet
- GT17 Instruction ManualDocument3 pagesGT17 Instruction ManualJose Angel Guitart GonzalezNo ratings yet
- References List Rev.8Document18 pagesReferences List Rev.8amir moniriNo ratings yet
- Starting Methods of Diesel Engine-AgonoyDocument4 pagesStarting Methods of Diesel Engine-AgonoyRAE ANGELO AGONOYNo ratings yet
- Tabla de Equivalencia de Aceites Lubricantes para Cárter Línea AutomotrizDocument3 pagesTabla de Equivalencia de Aceites Lubricantes para Cárter Línea AutomotrizRaul TarquiniNo ratings yet
- Hudson Mechanical Procedure Manul 1948-1949 PDFDocument339 pagesHudson Mechanical Procedure Manul 1948-1949 PDFJimTarletonNo ratings yet
- ATHENA Catalogo - Road-2017-LrDocument604 pagesATHENA Catalogo - Road-2017-LrLasse BackNo ratings yet
- Transonic CombustionDocument43 pagesTransonic CombustionJustin JosephNo ratings yet
- FJR 1300 AdDocument662 pagesFJR 1300 AdFelipe SafadiNo ratings yet
- Basic Test - Theory Examination (4 Sets)Document32 pagesBasic Test - Theory Examination (4 Sets)varun yadav100% (1)
- 370Z CanDocument98 pages370Z CanMitch MintonNo ratings yet
- Cilindro Roemheld 1474Document2 pagesCilindro Roemheld 1474AdrianaNo ratings yet