Download as pdf or txt
You might also like
- Semi Detailed Lesson Plan DIASS (Humss) (Demo)Document5 pagesSemi Detailed Lesson Plan DIASS (Humss) (Demo)Nildy Ponteras100% (4)
- Windspeed Distribution and Characteristics in NigeriaDocument6 pagesWindspeed Distribution and Characteristics in NigeriaDenis AkingbasoNo ratings yet
- SUMMATIVE TEST IN SCIENCE 6 (Fourth Quarter)Document3 pagesSUMMATIVE TEST IN SCIENCE 6 (Fourth Quarter)Cindy Mae Macamay100% (2)
- Wolfram - A New Kind of ScienceDocument1,197 pagesWolfram - A New Kind of SciencegertjanbisschopNo ratings yet
- Administrator's Guide To Portal Capabilities For Microsoft Dynamics 365 PDFDocument328 pagesAdministrator's Guide To Portal Capabilities For Microsoft Dynamics 365 PDFJohn DrewNo ratings yet
- Fast Regulation Method For Commutation Shifts For Sensorless Brushless DC MotorsDocument13 pagesFast Regulation Method For Commutation Shifts For Sensorless Brushless DC MotorsМихаил ВикторовичNo ratings yet
- A Current Index Approach To Compensate Commutation Phase Error For Sensorless Brushless DC Motors With Nonideal Back EMFDocument11 pagesA Current Index Approach To Compensate Commutation Phase Error For Sensorless Brushless DC Motors With Nonideal Back EMFSUMAN PAULNo ratings yet
- Feed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemDocument6 pagesFeed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemSiddharth Jayashekar KNo ratings yet
- Rotor Disc ProiectDocument4 pagesRotor Disc ProiecttarnaNo ratings yet
- An Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsDocument4 pagesAn Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsdevchandarNo ratings yet
- Electric Vehicle A Controller of Brushless DC Motor ForDocument6 pagesElectric Vehicle A Controller of Brushless DC Motor ForM MOHAMMED ARIEFNo ratings yet
- 3 111-04 PDFDocument6 pages3 111-04 PDFsethukumarkNo ratings yet
- Irjet V6i5784 PDFDocument6 pagesIrjet V6i5784 PDFMihir DaveNo ratings yet
- 10 1109@wcica 2006 1714295Document5 pages10 1109@wcica 2006 1714295SaduMunisekharNo ratings yet
- Diode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC ConverterDocument5 pagesDiode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC Convertermanoj kumarNo ratings yet
- Amirkafi 2018Document6 pagesAmirkafi 2018annaNo ratings yet
- Sisngle Phase RectifierDocument5 pagesSisngle Phase RectifiermücahitNo ratings yet
- Digital Simulation of ZVS DC To DC Converter Using Simulink: AbstractDocument13 pagesDigital Simulation of ZVS DC To DC Converter Using Simulink: AbstractAshok KumarNo ratings yet
- Research of Zero-Crossing Detection For Sensorless BLDC MotorDocument4 pagesResearch of Zero-Crossing Detection For Sensorless BLDC MotornassimNo ratings yet
- Reduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterDocument6 pagesReduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterRahardian TristantoNo ratings yet
- Commutation Torque Ripple Reduction in A Position Sensorless Brushless DC Motor DriveDocument5 pagesCommutation Torque Ripple Reduction in A Position Sensorless Brushless DC Motor DrivethsutiknoNo ratings yet
- Predictive Current Control With Reduction of Switching Frequency For Three Phase VoltageDocument6 pagesPredictive Current Control With Reduction of Switching Frequency For Three Phase Voltagedaiduongxanh14113No ratings yet
- Position Control of Low Cost Brushless DC Motor Using Hall SensorDocument4 pagesPosition Control of Low Cost Brushless DC Motor Using Hall SensorPablo TapiaNo ratings yet
- A Study of Synchronous Motor Drive Using SFC PDFDocument4 pagesA Study of Synchronous Motor Drive Using SFC PDFBrian GuevaraNo ratings yet
- Common-Mode Voltage Reduction For Regenerative AC DrivesDocument8 pagesCommon-Mode Voltage Reduction For Regenerative AC DrivesDao DaoNo ratings yet
- A Discrete Modeling For Power Factor Correction Circuit: Weiping Zhang, Fei Chen, Xusen Zhao, Yuanchao LiuDocument4 pagesA Discrete Modeling For Power Factor Correction Circuit: Weiping Zhang, Fei Chen, Xusen Zhao, Yuanchao LiuAnonymous zzfx7mz3No ratings yet
- Torque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterDocument5 pagesTorque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterShiju RamachandranNo ratings yet
- Fuzzy OkDocument4 pagesFuzzy OkA Xuan PhuNo ratings yet
- Fpga Based Indirect Position Detection and Speed Control of PMBLDC - Journals456 PDFDocument7 pagesFpga Based Indirect Position Detection and Speed Control of PMBLDC - Journals456 PDFhieuhuech10% (1)
- Jacob 2016Document7 pagesJacob 2016TrơNhưNitơNo ratings yet
- PLL Control Algorithm For Precise Speed Control of The Slotless PDFDocument7 pagesPLL Control Algorithm For Precise Speed Control of The Slotless PDFAshish KushwahaNo ratings yet
- One-Cycle-Controlled Bidirectional AC-to-DC Converter With Constant Power FactorDocument12 pagesOne-Cycle-Controlled Bidirectional AC-to-DC Converter With Constant Power FactorKrishna ReddyNo ratings yet
- PWM Switching Strategy For Torque Ripple Minimization in BLDC MotorDocument6 pagesPWM Switching Strategy For Torque Ripple Minimization in BLDC MotorekaliappanNo ratings yet
- Ieee PWMDocument4 pagesIeee PWMKeerthiNo ratings yet
- Resonant DC Link in PWM AC ChopperDocument5 pagesResonant DC Link in PWM AC ChopperMukesh SharmaNo ratings yet
- Slidin Mode Research PaperDocument33 pagesSlidin Mode Research PaperAnimesh JainNo ratings yet
- Sensorless Control of Brushless DC Motor With Delta Connection WindingsDocument4 pagesSensorless Control of Brushless DC Motor With Delta Connection WindingspramoddsaNo ratings yet
- Modelling and Simulation of Three Phase BLDC Motor For Electric Braking Using Matlab/SimulinkDocument6 pagesModelling and Simulation of Three Phase BLDC Motor For Electric Braking Using Matlab/Simulinkadane gashuNo ratings yet
- Small-Signal Analysis A DC-DC Converter With A Non-Symmetric Phase Integral-Lead ControllerDocument8 pagesSmall-Signal Analysis A DC-DC Converter With A Non-Symmetric Phase Integral-Lead ControllerVinhNo ratings yet
- Singh 2006Document10 pagesSingh 2006martin.teruelNo ratings yet
- MPC Rizado TorqueDocument6 pagesMPC Rizado TorquesebastianG1995No ratings yet
- Digital Simulation of ZVS DC To DC Converter Using Simulink: Research Scholar Sathyabama University Chennai, IndiaDocument13 pagesDigital Simulation of ZVS DC To DC Converter Using Simulink: Research Scholar Sathyabama University Chennai, Indiaaamirhussain_001No ratings yet
- Zeta Converter PidDocument7 pagesZeta Converter Pidvenkateswarlu chamalaNo ratings yet
- Adaptive Voltage Regulation of PWM Buck DC-DC Converters Using Backstepping Sliding Mode ControlDocument6 pagesAdaptive Voltage Regulation of PWM Buck DC-DC Converters Using Backstepping Sliding Mode ControlAbdelmalik BendaikhaNo ratings yet
- Inverter Distributed: Controller Generation SystemsDocument7 pagesInverter Distributed: Controller Generation SystemsJohnNo ratings yet
- A Matlahsimulink Tool For Power Converters Teaching A Power FacDocument5 pagesA Matlahsimulink Tool For Power Converters Teaching A Power FacRAJAN M SNo ratings yet
- Ts Boost ConverterDocument6 pagesTs Boost Converterala houamNo ratings yet
- Shiwani Ref3Document6 pagesShiwani Ref3PRACHI KATARENo ratings yet
- A Novel Modeling and Control Method For Three-Phase ConvertersDocument6 pagesA Novel Modeling and Control Method For Three-Phase Convertersdhirajbharat20No ratings yet
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocument6 pagesCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalNo ratings yet
- A Quick and Simplified Approach For Understanding The Dynamics of The SEPIC Converter For Low Voltage Applications Simulation StudyDocument4 pagesA Quick and Simplified Approach For Understanding The Dynamics of The SEPIC Converter For Low Voltage Applications Simulation StudyChandra ShettyNo ratings yet
- Realization of Fuzzy Logic Controlled BRDocument12 pagesRealization of Fuzzy Logic Controlled BRAbduljabbar QureshiNo ratings yet
- Sensorless Current Mode ControlDocument6 pagesSensorless Current Mode Controlsumiths32No ratings yet
- Simulation Current Controlled: Converter-InverterDocument5 pagesSimulation Current Controlled: Converter-InverterVivek VickyNo ratings yet
- Enumeration-Based Predictive Control For Buck DC-DC ConverterDocument5 pagesEnumeration-Based Predictive Control For Buck DC-DC ConverterKannan KochumonNo ratings yet
- Commutation-Torque-Ripple Minimization in Direct-Torque-Controlled PM Brushless DC DrivesDocument10 pagesCommutation-Torque-Ripple Minimization in Direct-Torque-Controlled PM Brushless DC DrivesmitulNo ratings yet
- Four Switch Three Phase Inverter Control of BLDC MotorDocument6 pagesFour Switch Three Phase Inverter Control of BLDC MotorBhargav Cho ChweetNo ratings yet
- Pulsewidth Modulation For Electronic Power Conversion: J. Holtz, Fellow, IEEE Wuppertal University - GermanyDocument18 pagesPulsewidth Modulation For Electronic Power Conversion: J. Holtz, Fellow, IEEE Wuppertal University - GermanyRangesh Babu100% (1)
- Non Isolated Low Cost Single Stage Buck-Boost AC To DC ConverterDocument6 pagesNon Isolated Low Cost Single Stage Buck-Boost AC To DC ConverterMani KandanNo ratings yet
- A New Approach To Sensorless Control Method For Brushless DC MotorsDocument23 pagesA New Approach To Sensorless Control Method For Brushless DC Motorsdeepthi056No ratings yet
- Position Control System Using Labview: Closed-LoopDocument4 pagesPosition Control System Using Labview: Closed-LoopAndreita Ortiz CuadrosNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- What Is Web Analytics?: AccentureDocument3 pagesWhat Is Web Analytics?: AccentureGopu MayyalaNo ratings yet
- What Is AI PDFDocument1 pageWhat Is AI PDFGopu MayyalaNo ratings yet
- Budgit Motor Driven Trolley PDFDocument20 pagesBudgit Motor Driven Trolley PDFGopu MayyalaNo ratings yet
- A Review: Speed Control of Brushless DC Motor: December 2017Document7 pagesA Review: Speed Control of Brushless DC Motor: December 2017Gopu MayyalaNo ratings yet
- Automatic Waste Segregation and Monitoring SystemDocument7 pagesAutomatic Waste Segregation and Monitoring SystemGopu Mayyala100% (1)
- Wipro QuantativeDocument19 pagesWipro QuantativeGopu MayyalaNo ratings yet
- ELLNA iMPLEMENTER FINALDocument22 pagesELLNA iMPLEMENTER FINALGina HerraduraNo ratings yet
- Galaxy Inmarsat-C/GPS: V5.0 Marine User's GuideDocument264 pagesGalaxy Inmarsat-C/GPS: V5.0 Marine User's GuideCostin CaraimanNo ratings yet
- 151-Enablon Orm - Permit To WorkDocument2 pages151-Enablon Orm - Permit To WorkRishikesh GunjalNo ratings yet
- Course Outline: Raazi@pafkiet - Edu.pkDocument2 pagesCourse Outline: Raazi@pafkiet - Edu.pkMohammedNo ratings yet
- Lab 1.1 - 1.1.7 Lab - Basic Switch ConfigurationDocument13 pagesLab 1.1 - 1.1.7 Lab - Basic Switch ConfigurationHeng PhinNo ratings yet
- MA Thesis The Role of The Ombudsman in I PDFDocument159 pagesMA Thesis The Role of The Ombudsman in I PDFSweta ToppoNo ratings yet
- Earthquake Resistant StructuresDocument15 pagesEarthquake Resistant StructuresCardo DalisayNo ratings yet
- Viichy France and The Resistance Culture & IdeologyDocument301 pagesViichy France and The Resistance Culture & IdeologyandybgNo ratings yet
- Topic Review Question and Case Study TopDocument6 pagesTopic Review Question and Case Study TopNorainah Abdul GaniNo ratings yet
- Stability of Floating BodiesDocument6 pagesStability of Floating Bodieskharry8davidNo ratings yet
- Year 2018 Best Ongoing Practices Bijhari Block by Vijay Kumar Heer, BRCC PrimaryDocument24 pagesYear 2018 Best Ongoing Practices Bijhari Block by Vijay Kumar Heer, BRCC PrimaryVIJAY KUMAR HEERNo ratings yet
- GUI Based Control System Analysis Using PID Controller For EducationDocument11 pagesGUI Based Control System Analysis Using PID Controller For Educationpascal toguNo ratings yet
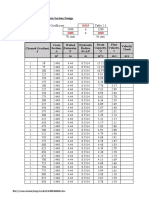
- Box Culvert / U-Drain Section Design: File:///conversion/tmp/scratch/488560866Document9 pagesBox Culvert / U-Drain Section Design: File:///conversion/tmp/scratch/488560866azwanNo ratings yet
- Thai RecipesDocument123 pagesThai Recipesmariana_luca_17100% (5)
- Leadership by Dr. Arpita KaulDocument65 pagesLeadership by Dr. Arpita KaulArpita KaulNo ratings yet
- Capstone Project ProposalDocument7 pagesCapstone Project Proposalapi-596258184No ratings yet
- Robinsons Daiso v. CIRDocument35 pagesRobinsons Daiso v. CIRaudreydql5No ratings yet
- Tourism Management: Emily Ma, Huijun Yang, Yao-Chin Wang, Hanqun SongDocument13 pagesTourism Management: Emily Ma, Huijun Yang, Yao-Chin Wang, Hanqun Song韩意颜No ratings yet
- Ethan Mollick TechTrendsDocument6 pagesEthan Mollick TechTrendsnsansaturninoNo ratings yet
- PPM Case Study AnswersDocument15 pagesPPM Case Study AnswersMohamed Kadri100% (2)
- Assignment Rubric Template 8.17.21Document3 pagesAssignment Rubric Template 8.17.21Aris Kendell BungabongNo ratings yet
- Case Management Framework Template - Installation - Quick StartDocument4 pagesCase Management Framework Template - Installation - Quick StartreddyNo ratings yet
- 1350.09 Rajlaxmi Construction NewDocument5 pages1350.09 Rajlaxmi Construction Newpriyanka singhNo ratings yet
- Form 16: Warora Kurnool Transmission LimitedDocument10 pagesForm 16: Warora Kurnool Transmission LimitedBHASKAR pNo ratings yet
- Endocrine To IGCSE BiologyDocument23 pagesEndocrine To IGCSE BiologyyarinaosuNo ratings yet