Download as docx, pdf, or txt
You might also like
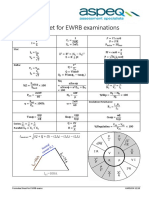
- Formulae Sheet For EWRB Examinations: For Examination Use OnlyDocument1 pageFormulae Sheet For EWRB Examinations: For Examination Use OnlyJason JiaNo ratings yet
- Schneider Wiring Diagram BookDocument109 pagesSchneider Wiring Diagram BooktanveerNo ratings yet
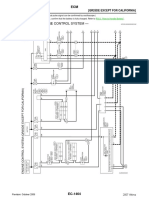
- Wiring Diagram - Engine Control SystemDocument14 pagesWiring Diagram - Engine Control Systempineda87100% (1)
- FORMULCEEMDocument2 pagesFORMULCEEMHernán RodarteNo ratings yet
- Physics FormulasDocument2 pagesPhysics FormulasKristine BalansagNo ratings yet
- Equations & Conversions: The Following Equations and Conversions Will Be Given As Part of ExamsDocument1 pageEquations & Conversions: The Following Equations and Conversions Will Be Given As Part of ExamsTruong NguyenNo ratings yet
- 2022EIR211E01 Formula SheetDocument1 page2022EIR211E01 Formula SheetCNo ratings yet
- Physics Formulas: MotionDocument6 pagesPhysics Formulas: MotionfarujoyNo ratings yet
- Formula Sheet HET182Document1 pageFormula Sheet HET182Stanley RegaliaNo ratings yet
- Formula Sheet Final 2013 Power Electronics PDFDocument4 pagesFormula Sheet Final 2013 Power Electronics PDFvipulNo ratings yet
- Physics FormulasDocument10 pagesPhysics FormulasFaith Laurence Sarmiento100% (1)
- PHYS2002 Final Formula Sheet: FdcosDocument8 pagesPHYS2002 Final Formula Sheet: FdcosWill okNo ratings yet
- Grade 11 Physics Equations and Constants Name: : KinematicsDocument1 pageGrade 11 Physics Equations and Constants Name: : KinematicsJasleenNo ratings yet
- Elektromossag KepletekDocument1 pageElektromossag KepletekJaman Sardin100% (1)
- Metc SesiuneDocument10 pagesMetc SesiuneRazvan 888No ratings yet
- Formula Sheet - Electrical MachinesDocument4 pagesFormula Sheet - Electrical MachinesShaneilNo ratings yet
- Physics EquationsDocument3 pagesPhysics Equationsanam abidNo ratings yet
- Phys EqDocument1 pagePhys EqGabrielle BlakeNo ratings yet
- Power Formula SheetDocument3 pagesPower Formula SheetyeeeNo ratings yet
- Lecture 29: Power - Sinusoidal Steady State: Lecturer: Dr. Vinita Vasudevan Scribe: Shashank ShekharDocument5 pagesLecture 29: Power - Sinusoidal Steady State: Lecturer: Dr. Vinita Vasudevan Scribe: Shashank ShekharAniruddha RoyNo ratings yet
- 07 Nonideal Transformer PDFDocument20 pages07 Nonideal Transformer PDFAhmed M H Al-YousifNo ratings yet
- Sample Formula Sheet FinalDocument3 pagesSample Formula Sheet Finalanmol singhNo ratings yet
- Carrier Action II S16Document18 pagesCarrier Action II S16puceiroaleNo ratings yet
- Formelsammlung KlausurDocument1 pageFormelsammlung KlausurlotfifakhrredineNo ratings yet
- Physics Mid Sem 2015Document9 pagesPhysics Mid Sem 2015gang gangNo ratings yet
- Feb15 1Document10 pagesFeb15 1quân nguyễn minhNo ratings yet
- Ac DCDocument34 pagesAc DCRichard MadandaNo ratings yet
- MCAT Physics Equations SheetDocument4 pagesMCAT Physics Equations SheetAshley ShanaéNo ratings yet
- FormularioDocument8 pagesFormulariojosue hernandezNo ratings yet
- Lecture EEE 447 Chap 3 Diode Rectifiers v2Document43 pagesLecture EEE 447 Chap 3 Diode Rectifiers v2Md. Anisur RahmanNo ratings yet
- General Formula SheetDocument2 pagesGeneral Formula SheetCaspar HutchinsonNo ratings yet
- RLC CircuitDocument33 pagesRLC Circuit23f3000077No ratings yet
- Phsi191 Mid Sem 2014Document8 pagesPhsi191 Mid Sem 2014gang gangNo ratings yet
- Induction MotorDocument5 pagesInduction MotorkamejayNo ratings yet
- Class B Amplifier EfficiencyDocument5 pagesClass B Amplifier EfficiencyHarshaNo ratings yet
- Formula Sheet 2021Document1 pageFormula Sheet 2021goldduckieadNo ratings yet
- Phy120 Serway EquationsDocument1 pagePhy120 Serway EquationsMohamed ElashriNo ratings yet
- Homework Assignment 9 Solution Set: PHYCS 4420 30 March, 2004Document6 pagesHomework Assignment 9 Solution Set: PHYCS 4420 30 March, 2004Fidtri KhoiriyahNo ratings yet
- Formulae 3Document2 pagesFormulae 3Venkataramanan SureshNo ratings yet
- Formula Sheet 2009Document11 pagesFormula Sheet 2009Khim JuanNo ratings yet
- Formulario CinéticoDocument1 pageFormulario CinéticocneburcNo ratings yet
- Formula SheetDocument1 pageFormula SheetChris YNo ratings yet
- The Physics Hypertextbook 1Document5 pagesThe Physics Hypertextbook 1govindraj87No ratings yet
- Formulario IIPDocument1 pageFormulario IIPBoffNo ratings yet
- CFA L3 FormulaDocument17 pagesCFA L3 Formulashrikrishna.b.98No ratings yet
- Physics 112 Formulae IIIDocument3 pagesPhysics 112 Formulae IIISaied RajehaNo ratings yet
- Electromagnetism Equation Sheet!!!!Document2 pagesElectromagnetism Equation Sheet!!!!Châu Lâm TuầnNo ratings yet
- PHYSICS 2760 Formula Sheet Exam 2 4 10 Wb/Am × 1.6 10 × CDocument2 pagesPHYSICS 2760 Formula Sheet Exam 2 4 10 Wb/Am × 1.6 10 × CKrutikNo ratings yet
- Cheat Sheet PDFDocument5 pagesCheat Sheet PDFDumaluNo ratings yet
- A.2 Semiconductor Equations Semiconductor Carrier ConcentrationsDocument5 pagesA.2 Semiconductor Equations Semiconductor Carrier ConcentrationsaqilatulfitriNo ratings yet
- App 02 PDFDocument5 pagesApp 02 PDFGalindo JoldanNo ratings yet
- Formule OETDocument1 pageFormule OETLeon TrohaNo ratings yet
- Week 1: Introduction: NM NM Ev Ev E DT T P EDocument9 pagesWeek 1: Introduction: NM NM Ev Ev E DT T P EInstituto Centro de Desenvolvimento da GestãoNo ratings yet
- Formula SheetDocument3 pagesFormula SheetCarlos GamioNo ratings yet
- 20 - L-9 (DK) (Pe) ( (Ee) Nptel)Document1 page20 - L-9 (DK) (Pe) ( (Ee) Nptel)GagneNo ratings yet
- Equation SheetDocument2 pagesEquation SheetjacobbanooniNo ratings yet
- Ultrasonic Testing Level Ii - Formula SheetDocument2 pagesUltrasonic Testing Level Ii - Formula Sheetbenderman1No ratings yet
- 2.065/2.066 Acoustics and Sensing: Massachusetts Institute of TechnologyDocument10 pages2.065/2.066 Acoustics and Sensing: Massachusetts Institute of TechnologyKurran SinghNo ratings yet
- 1d3formula PDFDocument1 page1d3formula PDFasdaasdNo ratings yet
- 3 X 5 Notecardtest 2Document1 page3 X 5 Notecardtest 2ttusigmapiNo ratings yet
- Formula Sheet-1Document2 pagesFormula Sheet-1Abdullah dhillon AbdullahNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- 1756 TBCHDocument8 pages1756 TBCHJorge Enrique Garcia GarciaNo ratings yet
- Product Data Sheet: Circuit Breaker Masterpact MTZ2 32H1, 3200 A, 4P Fixed, Without MicrologicDocument2 pagesProduct Data Sheet: Circuit Breaker Masterpact MTZ2 32H1, 3200 A, 4P Fixed, Without MicrologicamdatiNo ratings yet
- Servo Válvula NeumaticaDocument30 pagesServo Válvula NeumaticaJaime VelazquezNo ratings yet
- Track Busway Plug in Units - Domestic 6Document68 pagesTrack Busway Plug in Units - Domestic 6TBS Máy Phát ĐiệnNo ratings yet
- 2n7000r3 PDFDocument4 pages2n7000r3 PDFmrzleckiNo ratings yet
- Protective DevicesDocument7 pagesProtective Devicesbolt sparkNo ratings yet
- Perfect Harmony Drive: Product Type: Customer: Sales Order: Order NumberDocument3 pagesPerfect Harmony Drive: Product Type: Customer: Sales Order: Order NumberShafique AbdiNo ratings yet
- Vehicle Electrical Components: Console BoxDocument15 pagesVehicle Electrical Components: Console BoxIvaylo PetkovNo ratings yet
- Delta Fan/Pump Vector Control Drive CP2000 Series User ManualDocument868 pagesDelta Fan/Pump Vector Control Drive CP2000 Series User Manualotaku sekaiNo ratings yet
- Music Box Player ProjectDocument10 pagesMusic Box Player ProjectAdam AcostaNo ratings yet
- Clause 6.104.2. SC Making and Breaking TestDocument13 pagesClause 6.104.2. SC Making and Breaking Testlnhoang.fgroupNo ratings yet
- DGP30Document2 pagesDGP30jdzamoraNo ratings yet
- Cs 423e Electrical BWGDocument2 pagesCs 423e Electrical BWGqwureyquwery100% (1)
- Sofar 10.5 KTLM-G3Document2 pagesSofar 10.5 KTLM-G3Astell EngenhariaNo ratings yet
- 352 - 17385 - EC538 - 2013 - 4 - 1 - 1 - Problem Set 1 - V2Document3 pages352 - 17385 - EC538 - 2013 - 4 - 1 - 1 - Problem Set 1 - V2simoNo ratings yet
- 2ND Ob DLP 2023Document6 pages2ND Ob DLP 2023Kattie Alison MacatuggalNo ratings yet
- 08 SwitchDisconnectors LV10 042023 EN 202306011354213745Document156 pages08 SwitchDisconnectors LV10 042023 EN 202306011354213745hssvaldirNo ratings yet
- Max1510 Max17510-3126819Document14 pagesMax1510 Max17510-3126819Phong Phan CôngNo ratings yet
- Tdelectroniquel2 PDFDocument135 pagesTdelectroniquel2 PDFLACHARI AchrafNo ratings yet
- OVR T1-T2 3N 12.5-275s P QSDocument1 pageOVR T1-T2 3N 12.5-275s P QSDiego PeñaNo ratings yet
- 926 Instruction ManualDocument11 pages926 Instruction ManualPaulo FoglianoNo ratings yet
- Strowger or Step by Step ExchangesDocument4 pagesStrowger or Step by Step ExchangesParag MahajaniNo ratings yet
- Electrical Machines and Power-Electronic Systems For High-Power Wind Energy Generation ApplicationsDocument27 pagesElectrical Machines and Power-Electronic Systems For High-Power Wind Energy Generation ApplicationsFatih BurakNo ratings yet
- Amico Acp Alert 2 Alarm ManualDocument48 pagesAmico Acp Alert 2 Alarm ManualMSSNo ratings yet
- Mogora Tig 300 400Document1 pageMogora Tig 300 400Pasupathi100% (1)
- 5A IntegratorDocument5 pages5A IntegratorWilsonNo ratings yet
- Miniature Circuit Breaker - S200 - 2P - C - 10 Ampere: Product-DetailsDocument5 pagesMiniature Circuit Breaker - S200 - 2P - C - 10 Ampere: Product-DetailsHAROL ALEXIS VALENCIA OSPINANo ratings yet
- ST ConnectorDocument3 pagesST ConnectorKuanChuanNo ratings yet