
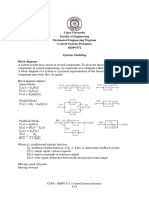
ME G511 Lect D August 2018
ME G511 Lect D August 2018
You might also like
- Kali Linux DocumentationDocument22 pagesKali Linux DocumentationTech VkNo ratings yet
- WD Gann Dynamic LevelDocument9 pagesWD Gann Dynamic LevelVipul Agrawal100% (2)
- Top BottomDocument9 pagesTop BottomVipul AgrawalNo ratings yet
- 5 - IoT Design LevelsDocument24 pages5 - IoT Design LevelsNIKHIL ARORANo ratings yet
- Meeting Wise Checklist 1Document1 pageMeeting Wise Checklist 1api-416923934No ratings yet
- Fundamental Concepts of AlgebraDocument10 pagesFundamental Concepts of Algebrakingson0% (1)
- ME G511 Lect 19 Oct 2018Document44 pagesME G511 Lect 19 Oct 2018Vipul AgrawalNo ratings yet
- ME G511 Lect 25 Equation of Motion Nov 2018Document23 pagesME G511 Lect 25 Equation of Motion Nov 2018Vipul AgrawalNo ratings yet
- ME G511 Lect 22 Static Analysis Nov 2018Document18 pagesME G511 Lect 22 Static Analysis Nov 2018Vipul AgrawalNo ratings yet
- ME G511 Lect 18 Oct 2018Document30 pagesME G511 Lect 18 Oct 2018Vipul Agrawal100% (1)
- ME G511 Lect A August 2018Document47 pagesME G511 Lect A August 2018Vipul Agrawal100% (1)
- Grass Cutting ROBOTDocument8 pagesGrass Cutting ROBOTKrishnaDuttPandeyKdpNo ratings yet
- De Es ZG561 PDFDocument59 pagesDe Es ZG561 PDFamareshhrNo ratings yet
- ME G511 Lect 4 Anatomy Sept 2018Document44 pagesME G511 Lect 4 Anatomy Sept 2018Vipul AgrawalNo ratings yet
- Mechanisms and Robotics de Es Zg561: Lecture - 2Document49 pagesMechanisms and Robotics de Es Zg561: Lecture - 2AnkithNo ratings yet
- ExPt 4 Ultra Sonic SensorDocument5 pagesExPt 4 Ultra Sonic SensorVipul AgrawalNo ratings yet
- Mechanisms and Robotics Lab (ME G-511 P) : BITS PilaniDocument3 pagesMechanisms and Robotics Lab (ME G-511 P) : BITS PilaniVipul AgrawalNo ratings yet
- ME G511 Lect B August 2018Document18 pagesME G511 Lect B August 2018Vipul AgrawalNo ratings yet
- AssignmentDocument1 pageAssignmentmahendraNo ratings yet
- Lecture Session 1 1627117300493Document56 pagesLecture Session 1 1627117300493balaji ddbNo ratings yet
- ME G511 Lect 5 Wrist Sept 2018Document26 pagesME G511 Lect 5 Wrist Sept 2018Vipul AgrawalNo ratings yet
- Mechatronics Handout BITSDocument3 pagesMechatronics Handout BITSmusarraf172No ratings yet
- Introduction To Matlab Robotics ToolboxDocument10 pagesIntroduction To Matlab Robotics ToolboxAlbertoAntoniettiNo ratings yet
- Lean Manu System - WhyDocument35 pagesLean Manu System - Whypavan hydNo ratings yet
- KOM ProjectDocument15 pagesKOM ProjectArvene Binmer JesaryNo ratings yet
- Concept of Power ElectronicsDocument23 pagesConcept of Power ElectronicsMuttoju VaishnaviNo ratings yet
- Catalogue GlenDocument23 pagesCatalogue Glenar_kushNo ratings yet
- VII - P, PI PID ControllersDocument77 pagesVII - P, PI PID ControllersTushit ThakkarNo ratings yet
- Measurement of Force, Torque and Shaft PowerDocument12 pagesMeasurement of Force, Torque and Shaft PowermirztrNo ratings yet
- Introduction To Robotics: Mechanics and ControlDocument2 pagesIntroduction To Robotics: Mechanics and ControlANDRES FELIPE GOMEZ CADAVID0% (1)
- TSMC 28nmDocument2 pagesTSMC 28nmprasanna_npNo ratings yet
- Dehumdifier 1Document46 pagesDehumdifier 1tssuwimal5973No ratings yet
- In Line Centrifugal Fan IOMDocument31 pagesIn Line Centrifugal Fan IOMMunyaradzi MarizaniNo ratings yet
- Inverted Pendulum Solution1Document13 pagesInverted Pendulum Solution1ggoloNo ratings yet
- Unit 2Document40 pagesUnit 2SindhujaSindhuNo ratings yet
- Assignment-02 Report Mechatronics 2016BA30045Document12 pagesAssignment-02 Report Mechatronics 2016BA30045ankit dimri100% (1)
- Emerging Energy Efficient Industrial TechnologiesDocument199 pagesEmerging Energy Efficient Industrial Technologiespeterbookworm2014No ratings yet
- Gate Note Fluid MechanicsDocument224 pagesGate Note Fluid MechanicsAlan Thomas100% (1)
- First Order InstrumentDocument11 pagesFirst Order InstrumentEr TikNo ratings yet
- Application of Quality Function Deployment in Developing An Air-Conditioning UnitDocument7 pagesApplication of Quality Function Deployment in Developing An Air-Conditioning UnitInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Gas Dynamics and Jet Propulsion 2marksDocument15 pagesGas Dynamics and Jet Propulsion 2marksAbdul rahumanNo ratings yet
- Mechatronics EngineeringDocument2 pagesMechatronics Engineeringsandysubash100% (1)
- Control System Engineering - 1Document22 pagesControl System Engineering - 1Uma MageshwariNo ratings yet
- ME302 Heat and Mass TransferDocument3 pagesME302 Heat and Mass TransferRagesh DuduNo ratings yet
- Engineering Mathematics With SolutionsDocument35 pagesEngineering Mathematics With SolutionsSindhu Velayudham100% (1)
- Satyabhama MechDocument97 pagesSatyabhama MechRahul Kumar KNo ratings yet
- Solution Control System Engineering Nagrath GopalDocument2 pagesSolution Control System Engineering Nagrath Gopalganesharun123No ratings yet
- Non Industrial Applications of RobotsDocument3 pagesNon Industrial Applications of RobotsDhalal AsmiNo ratings yet
- Mechatronics Merged Session IDocument88 pagesMechatronics Merged Session IrajeshkumrmNo ratings yet
- Basu-Fem Notes Me623Document210 pagesBasu-Fem Notes Me623Subhradeep ChatterjeeNo ratings yet
- ExergyDocument64 pagesExergyAndree RosalesNo ratings yet
- Stability Analysis of Nonlinear Systems Using Lyapunov Theory - IDocument28 pagesStability Analysis of Nonlinear Systems Using Lyapunov Theory - IGurpreet KaurNo ratings yet
- Final Phase 1 PPT Major ProjectDocument21 pagesFinal Phase 1 PPT Major ProjectSpandana priyaNo ratings yet
- ME G511 Lect C August 2018Document23 pagesME G511 Lect C August 2018Vipul AgrawalNo ratings yet
- Lecture 3Document5 pagesLecture 3akhbar elyoum academyNo ratings yet
- Combining Like TermsDocument38 pagesCombining Like TermsbagareslesliejaneNo ratings yet
- How Pi Can Save Your Life: Using Math to Survive Plane Crashes, Zombie Attacks, Alien Encounters, and Other Improbable Real-World SituationsFrom EverandHow Pi Can Save Your Life: Using Math to Survive Plane Crashes, Zombie Attacks, Alien Encounters, and Other Improbable Real-World SituationsNo ratings yet
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- 17 Days Advance Price Action - Ayush Thakur - 2023Document10 pages17 Days Advance Price Action - Ayush Thakur - 2023Vipul AgrawalNo ratings yet
- Excercise 1 Day 2Document5 pagesExcercise 1 Day 2Vipul AgrawalNo ratings yet
- Companies List and DetailsDocument17 pagesCompanies List and DetailsVipul AgrawalNo ratings yet
- IJNCAA Vol6No1Document37 pagesIJNCAA Vol6No1Vipul AgrawalNo ratings yet
- FractureDocument21 pagesFractureVipul AgrawalNo ratings yet
- Small Trend. ʜɪʜDocument14 pagesSmall Trend. ʜɪʜVipul AgrawalNo ratings yet
- Trailing Stop Loss BuyingDocument1 pageTrailing Stop Loss BuyingVipul AgrawalNo ratings yet
- Unit 27 Glossary-Basics of Capital MarketDocument9 pagesUnit 27 Glossary-Basics of Capital MarketVipul AgrawalNo ratings yet
- Marathon StrategyDocument3 pagesMarathon StrategyVipul AgrawalNo ratings yet
- TrendlineDocument18 pagesTrendlineVipul AgrawalNo ratings yet
- Warrior Tool Buy Sell Lable Added v2Document6 pagesWarrior Tool Buy Sell Lable Added v2Vipul AgrawalNo ratings yet
- ZZ + WMXDocument5 pagesZZ + WMXVipul AgrawalNo ratings yet
- Ultrawaveds Blueprints #1 @moneiacDocument9 pagesUltrawaveds Blueprints #1 @moneiacVipul AgrawalNo ratings yet
- VMS Gann Angles With Volatility Ver.1Document24 pagesVMS Gann Angles With Volatility Ver.1Vipul AgrawalNo ratings yet
- WD Gann Dynamic LevelDocument9 pagesWD Gann Dynamic LevelVipul Agrawal100% (1)
- Modern Steel Construction 2017 03Document86 pagesModern Steel Construction 2017 03ser_mayk100% (1)
- Session 3 - JournalDocument27 pagesSession 3 - JournalanandakumarNo ratings yet
- Sources For Digital Citizenship ThinglinkDocument2 pagesSources For Digital Citizenship Thinglinkapi-622044425No ratings yet
- Patent Registration in IndiaDocument25 pagesPatent Registration in IndiaRushikesh NikamNo ratings yet
- Franchise Brochure - NirulasDocument13 pagesFranchise Brochure - NirulasAnuj BhargavaNo ratings yet
- Spring-Batch Tutorial: Guide For Application DevelopersDocument24 pagesSpring-Batch Tutorial: Guide For Application DevelopersRabi ShankarNo ratings yet
- NASC SG7 19 Risk Assessments Method Statements RAMSDocument16 pagesNASC SG7 19 Risk Assessments Method Statements RAMSDoru-Mihai VlasNo ratings yet
- User's Manual: Machine ReferenceDocument74 pagesUser's Manual: Machine ReferenceAngel JiménezNo ratings yet
- Activity For MusicDocument3 pagesActivity For MusicRheian Karl Limson AguadoNo ratings yet
- Cellular RespirationDocument36 pagesCellular RespirationWillow ItchiroNo ratings yet
- Final ReportDocument110 pagesFinal ReportmasabmuzamilNo ratings yet
- Difficulties Faced by Students in WritingDocument9 pagesDifficulties Faced by Students in WritingFarooq ShahNo ratings yet
- Writing A BlogDocument5 pagesWriting A BlogJoyce SyNo ratings yet
- VW CB SegmentationDocument9 pagesVW CB SegmentationRazvan Iliescu100% (1)
- Hustler Magazine Inc V FalwellDocument6 pagesHustler Magazine Inc V FalwellJon Bandoma100% (1)
- Ignoratio ElenchiDocument1 pageIgnoratio ElenchiArionPamcenjeNo ratings yet
- Criminology TermsDocument4 pagesCriminology TermsTon RJ IdoNo ratings yet
- Core Values Module PaoloDocument9 pagesCore Values Module PaoloLala BoraNo ratings yet
- 'A Comparative Analysis For Customer Satisfaction Level of Levi's & Wrangler JeansDocument50 pages'A Comparative Analysis For Customer Satisfaction Level of Levi's & Wrangler JeansDigvijay Singh Chauhan80% (10)
- Amish Friendship Bread RecipeDocument1 pageAmish Friendship Bread RecipeTakara Lian TaylorNo ratings yet
- Using AutoProctor - Things You - NEED - To Know - AutoProctor BlogDocument2 pagesUsing AutoProctor - Things You - NEED - To Know - AutoProctor BlogSMKN4 MATARAMNo ratings yet
- TVT475.Digital NSDocument38 pagesTVT475.Digital NSjohn BronsonNo ratings yet
- NHA V RoxasDocument3 pagesNHA V RoxasRose QuimodNo ratings yet
- Tarangi Jim Corbett PresentationDocument21 pagesTarangi Jim Corbett PresentationKaran singhNo ratings yet
- Bid Document Volume I PKG 3Document85 pagesBid Document Volume I PKG 3J.S. RathoreNo ratings yet
- SR - Q1 2021 Cattle Situation ReportDocument6 pagesSR - Q1 2021 Cattle Situation ReportPhilip Blair OngNo ratings yet






































































































Download as pdf or txt
You might also like
- Kali Linux DocumentationDocument22 pagesKali Linux DocumentationTech VkNo ratings yet
- WD Gann Dynamic LevelDocument9 pagesWD Gann Dynamic LevelVipul Agrawal100% (2)
- Top BottomDocument9 pagesTop BottomVipul AgrawalNo ratings yet
- 5 - IoT Design LevelsDocument24 pages5 - IoT Design LevelsNIKHIL ARORANo ratings yet
- Meeting Wise Checklist 1Document1 pageMeeting Wise Checklist 1api-416923934No ratings yet
- Fundamental Concepts of AlgebraDocument10 pagesFundamental Concepts of Algebrakingson0% (1)
- ME G511 Lect 19 Oct 2018Document44 pagesME G511 Lect 19 Oct 2018Vipul AgrawalNo ratings yet
- ME G511 Lect 25 Equation of Motion Nov 2018Document23 pagesME G511 Lect 25 Equation of Motion Nov 2018Vipul AgrawalNo ratings yet
- ME G511 Lect 22 Static Analysis Nov 2018Document18 pagesME G511 Lect 22 Static Analysis Nov 2018Vipul AgrawalNo ratings yet
- ME G511 Lect 18 Oct 2018Document30 pagesME G511 Lect 18 Oct 2018Vipul Agrawal100% (1)
- ME G511 Lect A August 2018Document47 pagesME G511 Lect A August 2018Vipul Agrawal100% (1)
- Grass Cutting ROBOTDocument8 pagesGrass Cutting ROBOTKrishnaDuttPandeyKdpNo ratings yet
- De Es ZG561 PDFDocument59 pagesDe Es ZG561 PDFamareshhrNo ratings yet
- ME G511 Lect 4 Anatomy Sept 2018Document44 pagesME G511 Lect 4 Anatomy Sept 2018Vipul AgrawalNo ratings yet
- Mechanisms and Robotics de Es Zg561: Lecture - 2Document49 pagesMechanisms and Robotics de Es Zg561: Lecture - 2AnkithNo ratings yet
- ExPt 4 Ultra Sonic SensorDocument5 pagesExPt 4 Ultra Sonic SensorVipul AgrawalNo ratings yet
- Mechanisms and Robotics Lab (ME G-511 P) : BITS PilaniDocument3 pagesMechanisms and Robotics Lab (ME G-511 P) : BITS PilaniVipul AgrawalNo ratings yet
- ME G511 Lect B August 2018Document18 pagesME G511 Lect B August 2018Vipul AgrawalNo ratings yet
- AssignmentDocument1 pageAssignmentmahendraNo ratings yet
- Lecture Session 1 1627117300493Document56 pagesLecture Session 1 1627117300493balaji ddbNo ratings yet
- ME G511 Lect 5 Wrist Sept 2018Document26 pagesME G511 Lect 5 Wrist Sept 2018Vipul AgrawalNo ratings yet
- Mechatronics Handout BITSDocument3 pagesMechatronics Handout BITSmusarraf172No ratings yet
- Introduction To Matlab Robotics ToolboxDocument10 pagesIntroduction To Matlab Robotics ToolboxAlbertoAntoniettiNo ratings yet
- Lean Manu System - WhyDocument35 pagesLean Manu System - Whypavan hydNo ratings yet
- KOM ProjectDocument15 pagesKOM ProjectArvene Binmer JesaryNo ratings yet
- Concept of Power ElectronicsDocument23 pagesConcept of Power ElectronicsMuttoju VaishnaviNo ratings yet
- Catalogue GlenDocument23 pagesCatalogue Glenar_kushNo ratings yet
- VII - P, PI PID ControllersDocument77 pagesVII - P, PI PID ControllersTushit ThakkarNo ratings yet
- Measurement of Force, Torque and Shaft PowerDocument12 pagesMeasurement of Force, Torque and Shaft PowermirztrNo ratings yet
- Introduction To Robotics: Mechanics and ControlDocument2 pagesIntroduction To Robotics: Mechanics and ControlANDRES FELIPE GOMEZ CADAVID0% (1)
- TSMC 28nmDocument2 pagesTSMC 28nmprasanna_npNo ratings yet
- Dehumdifier 1Document46 pagesDehumdifier 1tssuwimal5973No ratings yet
- In Line Centrifugal Fan IOMDocument31 pagesIn Line Centrifugal Fan IOMMunyaradzi MarizaniNo ratings yet
- Inverted Pendulum Solution1Document13 pagesInverted Pendulum Solution1ggoloNo ratings yet
- Unit 2Document40 pagesUnit 2SindhujaSindhuNo ratings yet
- Assignment-02 Report Mechatronics 2016BA30045Document12 pagesAssignment-02 Report Mechatronics 2016BA30045ankit dimri100% (1)
- Emerging Energy Efficient Industrial TechnologiesDocument199 pagesEmerging Energy Efficient Industrial Technologiespeterbookworm2014No ratings yet
- Gate Note Fluid MechanicsDocument224 pagesGate Note Fluid MechanicsAlan Thomas100% (1)
- First Order InstrumentDocument11 pagesFirst Order InstrumentEr TikNo ratings yet
- Application of Quality Function Deployment in Developing An Air-Conditioning UnitDocument7 pagesApplication of Quality Function Deployment in Developing An Air-Conditioning UnitInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Gas Dynamics and Jet Propulsion 2marksDocument15 pagesGas Dynamics and Jet Propulsion 2marksAbdul rahumanNo ratings yet
- Mechatronics EngineeringDocument2 pagesMechatronics Engineeringsandysubash100% (1)
- Control System Engineering - 1Document22 pagesControl System Engineering - 1Uma MageshwariNo ratings yet
- ME302 Heat and Mass TransferDocument3 pagesME302 Heat and Mass TransferRagesh DuduNo ratings yet
- Engineering Mathematics With SolutionsDocument35 pagesEngineering Mathematics With SolutionsSindhu Velayudham100% (1)
- Satyabhama MechDocument97 pagesSatyabhama MechRahul Kumar KNo ratings yet
- Solution Control System Engineering Nagrath GopalDocument2 pagesSolution Control System Engineering Nagrath Gopalganesharun123No ratings yet
- Non Industrial Applications of RobotsDocument3 pagesNon Industrial Applications of RobotsDhalal AsmiNo ratings yet
- Mechatronics Merged Session IDocument88 pagesMechatronics Merged Session IrajeshkumrmNo ratings yet
- Basu-Fem Notes Me623Document210 pagesBasu-Fem Notes Me623Subhradeep ChatterjeeNo ratings yet
- ExergyDocument64 pagesExergyAndree RosalesNo ratings yet
- Stability Analysis of Nonlinear Systems Using Lyapunov Theory - IDocument28 pagesStability Analysis of Nonlinear Systems Using Lyapunov Theory - IGurpreet KaurNo ratings yet
- Final Phase 1 PPT Major ProjectDocument21 pagesFinal Phase 1 PPT Major ProjectSpandana priyaNo ratings yet
- ME G511 Lect C August 2018Document23 pagesME G511 Lect C August 2018Vipul AgrawalNo ratings yet
- Lecture 3Document5 pagesLecture 3akhbar elyoum academyNo ratings yet
- Combining Like TermsDocument38 pagesCombining Like TermsbagareslesliejaneNo ratings yet
- How Pi Can Save Your Life: Using Math to Survive Plane Crashes, Zombie Attacks, Alien Encounters, and Other Improbable Real-World SituationsFrom EverandHow Pi Can Save Your Life: Using Math to Survive Plane Crashes, Zombie Attacks, Alien Encounters, and Other Improbable Real-World SituationsNo ratings yet
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- 17 Days Advance Price Action - Ayush Thakur - 2023Document10 pages17 Days Advance Price Action - Ayush Thakur - 2023Vipul AgrawalNo ratings yet
- Excercise 1 Day 2Document5 pagesExcercise 1 Day 2Vipul AgrawalNo ratings yet
- Companies List and DetailsDocument17 pagesCompanies List and DetailsVipul AgrawalNo ratings yet
- IJNCAA Vol6No1Document37 pagesIJNCAA Vol6No1Vipul AgrawalNo ratings yet
- FractureDocument21 pagesFractureVipul AgrawalNo ratings yet
- Small Trend. ʜɪʜDocument14 pagesSmall Trend. ʜɪʜVipul AgrawalNo ratings yet
- Trailing Stop Loss BuyingDocument1 pageTrailing Stop Loss BuyingVipul AgrawalNo ratings yet
- Unit 27 Glossary-Basics of Capital MarketDocument9 pagesUnit 27 Glossary-Basics of Capital MarketVipul AgrawalNo ratings yet
- Marathon StrategyDocument3 pagesMarathon StrategyVipul AgrawalNo ratings yet
- TrendlineDocument18 pagesTrendlineVipul AgrawalNo ratings yet
- Warrior Tool Buy Sell Lable Added v2Document6 pagesWarrior Tool Buy Sell Lable Added v2Vipul AgrawalNo ratings yet
- ZZ + WMXDocument5 pagesZZ + WMXVipul AgrawalNo ratings yet
- Ultrawaveds Blueprints #1 @moneiacDocument9 pagesUltrawaveds Blueprints #1 @moneiacVipul AgrawalNo ratings yet
- VMS Gann Angles With Volatility Ver.1Document24 pagesVMS Gann Angles With Volatility Ver.1Vipul AgrawalNo ratings yet
- WD Gann Dynamic LevelDocument9 pagesWD Gann Dynamic LevelVipul Agrawal100% (1)
- Modern Steel Construction 2017 03Document86 pagesModern Steel Construction 2017 03ser_mayk100% (1)
- Session 3 - JournalDocument27 pagesSession 3 - JournalanandakumarNo ratings yet
- Sources For Digital Citizenship ThinglinkDocument2 pagesSources For Digital Citizenship Thinglinkapi-622044425No ratings yet
- Patent Registration in IndiaDocument25 pagesPatent Registration in IndiaRushikesh NikamNo ratings yet
- Franchise Brochure - NirulasDocument13 pagesFranchise Brochure - NirulasAnuj BhargavaNo ratings yet
- Spring-Batch Tutorial: Guide For Application DevelopersDocument24 pagesSpring-Batch Tutorial: Guide For Application DevelopersRabi ShankarNo ratings yet
- NASC SG7 19 Risk Assessments Method Statements RAMSDocument16 pagesNASC SG7 19 Risk Assessments Method Statements RAMSDoru-Mihai VlasNo ratings yet
- User's Manual: Machine ReferenceDocument74 pagesUser's Manual: Machine ReferenceAngel JiménezNo ratings yet
- Activity For MusicDocument3 pagesActivity For MusicRheian Karl Limson AguadoNo ratings yet
- Cellular RespirationDocument36 pagesCellular RespirationWillow ItchiroNo ratings yet
- Final ReportDocument110 pagesFinal ReportmasabmuzamilNo ratings yet
- Difficulties Faced by Students in WritingDocument9 pagesDifficulties Faced by Students in WritingFarooq ShahNo ratings yet
- Writing A BlogDocument5 pagesWriting A BlogJoyce SyNo ratings yet
- VW CB SegmentationDocument9 pagesVW CB SegmentationRazvan Iliescu100% (1)
- Hustler Magazine Inc V FalwellDocument6 pagesHustler Magazine Inc V FalwellJon Bandoma100% (1)
- Ignoratio ElenchiDocument1 pageIgnoratio ElenchiArionPamcenjeNo ratings yet
- Criminology TermsDocument4 pagesCriminology TermsTon RJ IdoNo ratings yet
- Core Values Module PaoloDocument9 pagesCore Values Module PaoloLala BoraNo ratings yet
- 'A Comparative Analysis For Customer Satisfaction Level of Levi's & Wrangler JeansDocument50 pages'A Comparative Analysis For Customer Satisfaction Level of Levi's & Wrangler JeansDigvijay Singh Chauhan80% (10)
- Amish Friendship Bread RecipeDocument1 pageAmish Friendship Bread RecipeTakara Lian TaylorNo ratings yet
- Using AutoProctor - Things You - NEED - To Know - AutoProctor BlogDocument2 pagesUsing AutoProctor - Things You - NEED - To Know - AutoProctor BlogSMKN4 MATARAMNo ratings yet
- TVT475.Digital NSDocument38 pagesTVT475.Digital NSjohn BronsonNo ratings yet
- NHA V RoxasDocument3 pagesNHA V RoxasRose QuimodNo ratings yet
- Tarangi Jim Corbett PresentationDocument21 pagesTarangi Jim Corbett PresentationKaran singhNo ratings yet
- Bid Document Volume I PKG 3Document85 pagesBid Document Volume I PKG 3J.S. RathoreNo ratings yet
- SR - Q1 2021 Cattle Situation ReportDocument6 pagesSR - Q1 2021 Cattle Situation ReportPhilip Blair OngNo ratings yet