Download as pdf or txt
You might also like
- Very Advanced Maternal Age, TOG-2021Document10 pagesVery Advanced Maternal Age, TOG-2021saeed hasan saeedNo ratings yet
- Modelado Rotary Pendulum Workbook InstructorDocument60 pagesModelado Rotary Pendulum Workbook Instructorsolid34100% (1)
- PHY133 Angular MomentumDocument6 pagesPHY133 Angular MomentumAngel RodriguezNo ratings yet
- Can Crusher MechanismDocument23 pagesCan Crusher Mechanismsaqlain05No ratings yet
- Woytowich R.calculation of Prope - dec.1979.JSRDocument7 pagesWoytowich R.calculation of Prope - dec.1979.JSRJohn KokarakisNo ratings yet
- Detailed Lesson Plan in TLE VIIDocument3 pagesDetailed Lesson Plan in TLE VIIJose Nilo Pastorall70% (10)
- Kasatha 5eDocument1 pageKasatha 5eBryce St. LouisNo ratings yet
- Kinematics-Of-Machinery 2 Mark QuestionsDocument33 pagesKinematics-Of-Machinery 2 Mark QuestionsNishanth ShannmugamNo ratings yet
- Kinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksDocument32 pagesKinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksRameez FaroukNo ratings yet
- Kinematics OF Machinery: Adithya Institute of TechnologyDocument34 pagesKinematics OF Machinery: Adithya Institute of TechnologybalajimetturNo ratings yet
- TOM Lab ManualDocument47 pagesTOM Lab Manualsrihari raoNo ratings yet
- Application of Intelligent Controller in A Ball and Beam Control SystemDocument16 pagesApplication of Intelligent Controller in A Ball and Beam Control SystemjerrythaNo ratings yet
- Mechanics of Machines (314205) : Design, Fabrication and Analysis of Dual Can CrusherDocument10 pagesMechanics of Machines (314205) : Design, Fabrication and Analysis of Dual Can Crushersaqlain05No ratings yet
- Lab5a Fa10Document4 pagesLab5a Fa10alexlenevez_12130% (1)
- Me 6401 Kom - Uti Ans KeyDocument11 pagesMe 6401 Kom - Uti Ans Keylogeshboy007100% (1)
- Classification of CamsDocument18 pagesClassification of CamsabasNo ratings yet
- Two Speed Epicycle Gear TrainsDocument7 pagesTwo Speed Epicycle Gear Trainsxmtqnkn8vjNo ratings yet
- Kinematics of MechanismsDocument82 pagesKinematics of MechanismsviahulNo ratings yet
- Quick Return MechanismDocument5 pagesQuick Return MechanismAarya ParadkarNo ratings yet
- Ch09 SSM 070904Document26 pagesCh09 SSM 070904VinhTranNo ratings yet
- Quick Return MechanismsDocument2 pagesQuick Return MechanismsAbhinash KumarNo ratings yet
- Kinematics of Machinery (AU 402) : Types of Kinematic Chain With Four Lower PairsDocument11 pagesKinematics of Machinery (AU 402) : Types of Kinematic Chain With Four Lower PairsJanardhanaNo ratings yet
- Use of Connectors in ABAQUS/Explicit To Simulate Dynamic Motion Along A Curved PathDocument15 pagesUse of Connectors in ABAQUS/Explicit To Simulate Dynamic Motion Along A Curved PathTina LoweNo ratings yet
- Chapter 2 Gear Trains.Document11 pagesChapter 2 Gear Trains.sbusisoNo ratings yet
- Shear and Moment DiagramDocument10 pagesShear and Moment Diagramkim adrian bangayanNo ratings yet
- SKshah Unit 1 Part 2Document18 pagesSKshah Unit 1 Part 2Neelesh SahuNo ratings yet
- Research On Kinematics of 3-Dof Connecting Rod ManDocument10 pagesResearch On Kinematics of 3-Dof Connecting Rod Manpad abtNo ratings yet
- Mechanism 1Document82 pagesMechanism 1papulimech100% (3)
- Report of Mechanics of Machines 1Document12 pagesReport of Mechanics of Machines 1muhammaduzairNo ratings yet
- Laboratory Manual MEC229: Theory of Machines LaboratoryDocument51 pagesLaboratory Manual MEC229: Theory of Machines Laboratoryhemanth singhNo ratings yet
- Nonlinear Control of A Furuta Rotary Inverted PendulumDocument27 pagesNonlinear Control of A Furuta Rotary Inverted PendulumdiemtrieuNo ratings yet
- Inversion of The MechanismDocument5 pagesInversion of The MechanismRanjit Rajendran100% (1)
- 2 DOF Ball Balancer - Workbook (Instructor)Document32 pages2 DOF Ball Balancer - Workbook (Instructor)Raaj LavaNo ratings yet
- 2 DOF Ball Balancer - Workbook (Instructor) PDFDocument32 pages2 DOF Ball Balancer - Workbook (Instructor) PDFRaaj LavaNo ratings yet
- Shaft PulleyDocument12 pagesShaft PulleykeirthNo ratings yet
- DOM-I-Force Analysis PDFDocument26 pagesDOM-I-Force Analysis PDFNaveenKrishNo ratings yet
- physicsHL IADocument15 pagesphysicsHL IAAziz Samet ZorluNo ratings yet
- Static Mechanical System Section1: Stress, Shear Force and Bending MomentDocument17 pagesStatic Mechanical System Section1: Stress, Shear Force and Bending MomentHadhi Hassan KhanNo ratings yet
- Shear and Moment Diagram - Wikipedia, The Free EncyclopediaDocument10 pagesShear and Moment Diagram - Wikipedia, The Free EncyclopediaPrabhat MishraNo ratings yet
- SRV02-Series Ball & Beam: Student HandoutDocument13 pagesSRV02-Series Ball & Beam: Student HandoutKeli KeyNo ratings yet
- Zhang 2011Document5 pagesZhang 2011Sajad Sadeghi MoghadamNo ratings yet
- Trajectory - Tracking - of - A - Pneumatically - Driven - PDocument6 pagesTrajectory - Tracking - of - A - Pneumatically - Driven - PQuyết Nguyễn CôngNo ratings yet
- Solved Questions MTM PDFDocument12 pagesSolved Questions MTM PDFRajendrakumarNo ratings yet
- 01 Engine Force AnalysisDocument27 pages01 Engine Force AnalysisSunny DesharNo ratings yet
- Robotics: Kinematics, Dynamics and Motion Control Module - 5 VITDocument60 pagesRobotics: Kinematics, Dynamics and Motion Control Module - 5 VITHarisankar R N R 21BRS1524No ratings yet
- 10ROTATIONAL Equilibrium and Non-Equilibrium (P211) Rev2.2Document7 pages10ROTATIONAL Equilibrium and Non-Equilibrium (P211) Rev2.2Shriya SaiNo ratings yet
- Shear and Moment Diagram - Wikipedia, The Free EncyclopediaDocument9 pagesShear and Moment Diagram - Wikipedia, The Free EncyclopediazidaaanNo ratings yet
- Theory of Machines Practical File: Prof. R. A. KhanDocument33 pagesTheory of Machines Practical File: Prof. R. A. KhanBarbie JooNo ratings yet
- A Slider-Crank Experiment To Determine The Action of Static ForcesDocument10 pagesA Slider-Crank Experiment To Determine The Action of Static ForcesRazali Yusoff100% (1)
- Nonlinear Analysis and Control of A Reaction-Wheel-Based 3-D Inverted PendulumDocument12 pagesNonlinear Analysis and Control of A Reaction-Wheel-Based 3-D Inverted PendulumVictor PassosNo ratings yet
- Crank and Slotted Lever Quick Return (Rev2)Document9 pagesCrank and Slotted Lever Quick Return (Rev2)Vipin YadavNo ratings yet
- Lab3a 2019Document10 pagesLab3a 2019Olivia PowerNo ratings yet
- Tme 11303 CHP1Document26 pagesTme 11303 CHP1Tuisyen Al FatehNo ratings yet
- Class 3Document11 pagesClass 3Manjula sNo ratings yet
- Pendulo Doble MotorDocument10 pagesPendulo Doble Motorjuan alarconNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Openfaom Turbo Compressible Turbulent SolverDocument20 pagesOpenfaom Turbo Compressible Turbulent Solverpranav razdanNo ratings yet
- Star CD UserDocument406 pagesStar CD Userpranav razdanNo ratings yet
- Ding 2014Document4 pagesDing 2014pranav razdanNo ratings yet
- 08521629Document5 pages08521629pranav razdanNo ratings yet
- VCC NumericalDocument13 pagesVCC Numericalpranav razdanNo ratings yet
- Notes On RacDocument25 pagesNotes On Racpranav razdanNo ratings yet
- Importance of Assessment of Intelligence in Clinical PsychologyDocument1 pageImportance of Assessment of Intelligence in Clinical PsychologyKimberly AlcantaraNo ratings yet
- Workbook For Developmental Communications 1 UNIT 6Document14 pagesWorkbook For Developmental Communications 1 UNIT 6soldadodeslealNo ratings yet
- Tve 8 Shielded Metal Arc WeldingDocument11 pagesTve 8 Shielded Metal Arc WeldingJOHN ALFRED MANANGGITNo ratings yet
- Steamshovel Press Issue 04Document60 pagesSteamshovel Press Issue 04liondog1No ratings yet
- Ip Talks Presentation - Keaune ReevesDocument2 pagesIp Talks Presentation - Keaune Reeveskarina talledoNo ratings yet
- Knowledge of Cervical Cancer and Acceptance of HPVDocument6 pagesKnowledge of Cervical Cancer and Acceptance of HPVALIF FITRI BIN MOHD JASMINo ratings yet
- Viber For Business - Advertising Solutions-2Document24 pagesViber For Business - Advertising Solutions-2htetarkar022023No ratings yet
- Angela SolikovaDocument10 pagesAngela SolikovaGirisha PathakNo ratings yet
- Entrepreneurial Lessons From The Bhagavad GitaDocument13 pagesEntrepreneurial Lessons From The Bhagavad GitaMahima FamousNo ratings yet
- Form 1.3 Summary of Current CompetenciesDocument3 pagesForm 1.3 Summary of Current CompetenciesJinky AydallaNo ratings yet
- Medicinal PlantsDocument36 pagesMedicinal PlantsGuardian AngelsNo ratings yet
- Persons With Disabilities: Key PointsDocument8 pagesPersons With Disabilities: Key PointsShane ArroyoNo ratings yet
- Bowthorpe News May 2017Document36 pagesBowthorpe News May 2017Anonymous AySEIwycNo ratings yet
- Sony Bravia CatalogueDocument25 pagesSony Bravia CataloguerealindiapropertyNo ratings yet
- Services Provided by Merchant BanksDocument4 pagesServices Provided by Merchant BanksParul PrasadNo ratings yet
- LoB Player Guide Pyram KingDocument15 pagesLoB Player Guide Pyram KingRonaldo SilveiraNo ratings yet
- Brigada Solicitation and InvitationDocument3 pagesBrigada Solicitation and Invitationguendolyn templadoNo ratings yet
- ASD PEDS Administration GuidelinesDocument5 pagesASD PEDS Administration GuidelinesInes Arias PazNo ratings yet
- Size & Estimation of DWDocument12 pagesSize & Estimation of DWGiuseppe GiuseppeNo ratings yet
- 01 Boothe V Director of PatentsDocument3 pages01 Boothe V Director of PatentsPio Guieb AguilarNo ratings yet
- Notice: Agency Information Collection Activities Proposals, Submissions, and ApprovalsDocument2 pagesNotice: Agency Information Collection Activities Proposals, Submissions, and ApprovalsJustia.comNo ratings yet
- Schwarze Schlichte Salesfolder enDocument6 pagesSchwarze Schlichte Salesfolder en姚晓卫No ratings yet
- Laporan Minggu 1 & 2 B.Inggris Nur Kholis-29-2AI1Document6 pagesLaporan Minggu 1 & 2 B.Inggris Nur Kholis-29-2AI1Kawek KagoelNo ratings yet
- Light Sport Aircraft: Standard Terminology ForDocument6 pagesLight Sport Aircraft: Standard Terminology ForAhmad Zubair RasulyNo ratings yet
- Dungeoncraft Wild Beyond The Witchlight v1.1Document9 pagesDungeoncraft Wild Beyond The Witchlight v1.1RalphNo ratings yet
- Pediatric OrthopaedicDocument66 pagesPediatric OrthopaedicDhito RodriguezNo ratings yet
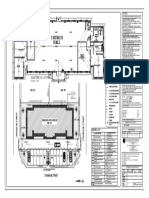
- Kakhisong Church A2-ModelDocument1 pageKakhisong Church A2-ModelanzaniNo ratings yet