Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- NA IntExam 2020 PDFDocument12 pagesNA IntExam 2020 PDFVangheli TVNo ratings yet
- Europass CV 20130527 Odipiyo ENDocument4 pagesEuropass CV 20130527 Odipiyo ENOdipiyo PaulNo ratings yet
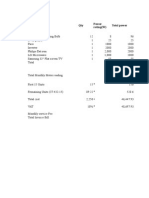
- Calculating Domestic Energy ConsumptionDocument2 pagesCalculating Domestic Energy ConsumptionOdipiyo PaulNo ratings yet
- Requirements For A Good LPS.: LengthDocument2 pagesRequirements For A Good LPS.: LengthOdipiyo PaulNo ratings yet
- As D PH EO 4001 2 Common Auxiliaries Controller Equipment Electrical Wiring DiagramDocument323 pagesAs D PH EO 4001 2 Common Auxiliaries Controller Equipment Electrical Wiring DiagramOdipiyo PaulNo ratings yet
- Principles of Electrical Machines and Power Electronics Solution Manual P.c.senDocument185 pagesPrinciples of Electrical Machines and Power Electronics Solution Manual P.c.senRuiVagner71% (14)
- As D SW SP 4600 3Document9 pagesAs D SW SP 4600 3Odipiyo Paul100% (2)
- StructureDocument2 pagesStructureOdipiyo PaulNo ratings yet
- Problem Solving Exercises in MMWDocument5 pagesProblem Solving Exercises in MMWBetel Ge Use100% (1)
- Geometry Section 2 5Document8 pagesGeometry Section 2 5api-262621710No ratings yet
- 2005 Mathematical Methods (CAS) Exam Assessment Report Exam 1 PDFDocument6 pages2005 Mathematical Methods (CAS) Exam Assessment Report Exam 1 PDFpinkangel2868_142411No ratings yet
- Math II - Unit 2-Right Triangle Trig Lessons 1-13Document60 pagesMath II - Unit 2-Right Triangle Trig Lessons 1-13Kelvin LaiNo ratings yet
- Electrical Engineering Topicwise Solved Papers by R.K. Kanodia PDFDocument528 pagesElectrical Engineering Topicwise Solved Papers by R.K. Kanodia PDFDharmesh Kushwaha80% (5)
- P4 Integration (Exponential) QPDocument2 pagesP4 Integration (Exponential) QPAFRAH ANEESNo ratings yet
- Least Squares Fit To PolynomialDocument12 pagesLeast Squares Fit To PolynomialAbhishek karwalNo ratings yet
- Modular Arithmetic Concepts and Applications PDFDocument63 pagesModular Arithmetic Concepts and Applications PDFADETUNMBI EMMANUEL OLUKUNLE100% (2)
- Mathematical Techniques 1 (SPA4121) Module Overview: Dr. Jeanne Wilson - September 2017Document12 pagesMathematical Techniques 1 (SPA4121) Module Overview: Dr. Jeanne Wilson - September 2017Roy VeseyNo ratings yet
- Ansal Lasses Q. B. On Application of DerivativeDocument15 pagesAnsal Lasses Q. B. On Application of Derivativesanjana singh jagrawalNo ratings yet
- Acjc 9758 2023 Prelim p1Document9 pagesAcjc 9758 2023 Prelim p1Shen Yue Er (Rvhs)No ratings yet
- Vector SheetDocument43 pagesVector SheetAvish BhatiaNo ratings yet
- Review ADocument4 pagesReview AVincent Doroy De Cardo100% (1)
- Mathematics PPT: Name - Ankit Mishra Class - Xii-B ROLL NO - 10Document5 pagesMathematics PPT: Name - Ankit Mishra Class - Xii-B ROLL NO - 10Ankit MishraNo ratings yet
- Chapter 2 Functions Exercises 2.1Document19 pagesChapter 2 Functions Exercises 2.1Jeffrish raidnNo ratings yet
- Enlargement Worksheet CDocument10 pagesEnlargement Worksheet CGrace YunNo ratings yet
- Notes On Kronecker Products: 1 The Stack OperatorDocument4 pagesNotes On Kronecker Products: 1 The Stack Operatoraimal0% (1)
- CDS Syllabus For General KnowledgeDocument3 pagesCDS Syllabus For General KnowledgeRaghavendraNo ratings yet
- CHAPTER 3 - CALCULUS OF TENSORS - 1994 - Continuum MechanicsDocument46 pagesCHAPTER 3 - CALCULUS OF TENSORS - 1994 - Continuum MechanicsAnonymous PO7VwbBnNo ratings yet
- Graham D. WilliamsDocument151 pagesGraham D. Williamsccouy123No ratings yet
- MA6151 Mathematics I QBDocument9 pagesMA6151 Mathematics I QBAshokNo ratings yet
- Tutorial Set 1Document4 pagesTutorial Set 1poweder gunNo ratings yet
- Learning Stata Guide For BeginnersDocument16 pagesLearning Stata Guide For BeginnersResearchteam2014No ratings yet
- Basic Concepts in MathematicsDocument53 pagesBasic Concepts in MathematicsJonas Raphael PalomoNo ratings yet
- 20.3.4 - Repeated Roots Reduction of OrderDocument16 pages20.3.4 - Repeated Roots Reduction of OrderJobert CajayonNo ratings yet
- Local Media5854841898931451372Document12 pagesLocal Media5854841898931451372EDETH SUBONGNo ratings yet
- Numerical Modeling in AcousticsDocument9 pagesNumerical Modeling in AcousticsSandeep JaiswalNo ratings yet
- Mathematical Description of Continuous-Time Signals: M. J. Roberts All Rights Reserved. Edited by Dr. Robert AklDocument56 pagesMathematical Description of Continuous-Time Signals: M. J. Roberts All Rights Reserved. Edited by Dr. Robert AklFaraz HumayunNo ratings yet
- Maths WorksheetDocument6 pagesMaths WorksheetkenenisashoppingstoreNo ratings yet