Download as pdf or txt
You might also like
- DIZON FARMS EMoPDocument3 pagesDIZON FARMS EMoPJysar Reubal100% (1)
- Scienceclinic Smartprep Gr12 Dbe Eng v3.0Document69 pagesScienceclinic Smartprep Gr12 Dbe Eng v3.0Ridwaan SalieNo ratings yet
- Strength of MeterialsDocument142 pagesStrength of MeterialsEricJohnDeraferaNo ratings yet
- Simple Stress StrainDocument141 pagesSimple Stress Strainjs kalyana ramaNo ratings yet
- CI Engine Lab ReportDocument7 pagesCI Engine Lab ReportMichael Adrian100% (4)
- Transport Phenomena: CHE411 ADocument5 pagesTransport Phenomena: CHE411 Aonyx100% (1)
- Whirling of ShaftDocument5 pagesWhirling of ShaftGauthamSarang0% (1)
- Torsional Vibration HandoutsDocument3 pagesTorsional Vibration HandoutsjaycobsmillanNo ratings yet
- Advanced Mechanical Vibrations-2Document114 pagesAdvanced Mechanical Vibrations-2Abdullah AwanNo ratings yet
- Vibration EngineeringDocument37 pagesVibration EngineeringAlen Benguit II0% (1)
- Rectilinear MotionDocument4 pagesRectilinear MotionS KumarNo ratings yet
- DOM Unit-IDocument48 pagesDOM Unit-IRamanathan DuraiNo ratings yet
- Whirling of ShaftDocument0 pagesWhirling of ShaftGinu ThomasNo ratings yet
- University of Hail: Gears - GeneralDocument51 pagesUniversity of Hail: Gears - GeneralROBINNo ratings yet
- What Is The Basic Concept of VibrationDocument5 pagesWhat Is The Basic Concept of VibrationVimal WoosyeNo ratings yet
- Mechanical Design of Machine Elements-CouplingDocument10 pagesMechanical Design of Machine Elements-Couplingmuhammad azmiNo ratings yet
- Lecture Notes EMG 2205Document85 pagesLecture Notes EMG 2205earn owinoNo ratings yet
- Lect Acceleration AnalysisDocument107 pagesLect Acceleration AnalysisTalha Khanzada100% (1)
- Mechanical Design PART - 01: Buet Buet Buet BuetDocument71 pagesMechanical Design PART - 01: Buet Buet Buet BuetShadmanSakiefHridoy100% (1)
- Relative MotionDocument3 pagesRelative Motionkaushik247No ratings yet
- ClutchesDocument32 pagesClutchesWeins GemerlapNo ratings yet
- Velocity and AccelartionDocument56 pagesVelocity and Accelartionadus lakshmanNo ratings yet
- Vibration Under General Forcing ConditionsDocument48 pagesVibration Under General Forcing ConditionsEpimerianos AberianosNo ratings yet
- Free Vibration With DampingDocument31 pagesFree Vibration With Dampingriya pradhanNo ratings yet
- Chapter 1 - Stress and StrainDocument77 pagesChapter 1 - Stress and StrainIman Fitri IsmailNo ratings yet
- Pressure VesselsDocument37 pagesPressure VesselsJillianne PadilloNo ratings yet
- Cetane NumberDocument4 pagesCetane NumberSudarshanBhardwajNo ratings yet
- Machine Design IIDocument23 pagesMachine Design IIBinar Arum OktaviaNo ratings yet
- Fundamentals of Stress Analysis ConclusionDocument11 pagesFundamentals of Stress Analysis ConclusionAbdel Hamied EbrahemNo ratings yet
- 7.IITD 2012 Theory of VibrationDocument9 pages7.IITD 2012 Theory of Vibrationlaith adnanNo ratings yet
- Engineering Mechanics PPT 1Document48 pagesEngineering Mechanics PPT 1muralikrishna1917100% (3)
- Machine Elements Quiz 1Document17 pagesMachine Elements Quiz 1Quen CuestaNo ratings yet
- PDF 38 1 PDFDocument190 pagesPDF 38 1 PDFCharan GorentlaNo ratings yet
- Kinematics of MachineryDocument65 pagesKinematics of Machinerykumaravel07No ratings yet
- Clutches Kul 3 PDFDocument39 pagesClutches Kul 3 PDFRudy ArthaNo ratings yet
- Basicthermo Compiled TnshridharDocument129 pagesBasicthermo Compiled Tnshridharsohan2902No ratings yet
- My Lecture in Vibration EngineeringDocument29 pagesMy Lecture in Vibration EngineeringrollramsNo ratings yet
- The Second Law of Thermodynamics: Refrigerators EntropyDocument33 pagesThe Second Law of Thermodynamics: Refrigerators EntropyKristine Rodriguez-CarnicerNo ratings yet
- Experiment #1: Whirling of ShaftsDocument7 pagesExperiment #1: Whirling of ShaftsJibran Ansari0% (1)
- Design of ShaftDocument20 pagesDesign of ShaftPranav BhatnagarNo ratings yet
- E. v. v. Ramanamurthy, S. Ramachandran-Design of Transmission Systems-Air Walk Publ. (2015)Document1,038 pagesE. v. v. Ramanamurthy, S. Ramachandran-Design of Transmission Systems-Air Walk Publ. (2015)Anonymous BrraRVdvv383% (18)
- Lecture 4 - Design For Variable LoadingDocument37 pagesLecture 4 - Design For Variable LoadingHafiz AbdulRehmanNo ratings yet
- 64217Document28 pages64217amdevaNo ratings yet
- Lecture 11 Thermal Ii (14 .07.2020)Document26 pagesLecture 11 Thermal Ii (14 .07.2020)Dr. BIBIN CHIDAMBARANATHANNo ratings yet
- AUTO400 Homework Assignment 1 SOLUTIONDocument16 pagesAUTO400 Homework Assignment 1 SOLUTIONVinoliaEdwin100% (1)
- Edited Module1 ThermoDocument18 pagesEdited Module1 ThermoAnnaliza Alcazar ApostolNo ratings yet
- DTS Unit 5Document20 pagesDTS Unit 5Muthuvel MNo ratings yet
- Mechanical Vibrations-2Document18 pagesMechanical Vibrations-2Omar ShadyNo ratings yet
- Strength of Materials Problems & SolutionsDocument34 pagesStrength of Materials Problems & SolutionsHasen Bebba67% (6)
- Heat Transfer: Mechanical EngineeringDocument10 pagesHeat Transfer: Mechanical EngineeringVenkatasairamreddy KandulaNo ratings yet
- Theory of Machinary-1 PDFDocument258 pagesTheory of Machinary-1 PDFPriya KumarNo ratings yet
- 3some Solutions For External Laminar PDFDocument74 pages3some Solutions For External Laminar PDFZaed N ZaedNo ratings yet
- CE 02016 p1 24pageDocument93 pagesCE 02016 p1 24pageMd Saiful Islam RajonNo ratings yet
- Two Lecture VibrationDocument12 pagesTwo Lecture VibrationUjjawal Gupta100% (1)
- Lecture 21Document38 pagesLecture 21yakwetuNo ratings yet
- Publication 11 13792 562Document6 pagesPublication 11 13792 562srinivasanNo ratings yet
- Lecture Two (Free Vibration of Single Degree of Freedom)Document34 pagesLecture Two (Free Vibration of Single Degree of Freedom)edosaNo ratings yet
- Wave Optics DSSSBDocument30 pagesWave Optics DSSSBShubhamNo ratings yet
- Vib23 Module 6Document5 pagesVib23 Module 6Rouaa khaledNo ratings yet
- EP2CD4T4. Harmonic Motion and Resonance NotesDocument27 pagesEP2CD4T4. Harmonic Motion and Resonance NotesJason wonwonNo ratings yet
- Acoustics Laboratory Guide I (Sessions 1 & 2)Document9 pagesAcoustics Laboratory Guide I (Sessions 1 & 2)cesarpiquerastNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Lecture 14Document6 pagesLecture 14iangarvinsNo ratings yet
- Lecture 5a. Reports, Proposals, and Instructions For The WorkplaceDocument24 pagesLecture 5a. Reports, Proposals, and Instructions For The WorkplaceiangarvinsNo ratings yet
- ZIDINDocument21 pagesZIDINiangarvinsNo ratings yet
- Faculty of Engineering: Department of Electrical and Electronics Final Project ReportDocument31 pagesFaculty of Engineering: Department of Electrical and Electronics Final Project ReportiangarvinsNo ratings yet
- Assignment CN Yr3Document1 pageAssignment CN Yr3iangarvinsNo ratings yet
- 03 Microsystems Fabrication ProcessesDocument3 pages03 Microsystems Fabrication ProcessesiangarvinsNo ratings yet
- 02 Materials For MEMs and MicrosystemsDocument12 pages02 Materials For MEMs and MicrosystemsiangarvinsNo ratings yet
- Kyambogo University: Office of The Guild SpeakerDocument4 pagesKyambogo University: Office of The Guild SpeakeriangarvinsNo ratings yet
- Lecture 5b. Report Structure For Engineers - 0Document66 pagesLecture 5b. Report Structure For Engineers - 0iangarvinsNo ratings yet
- Chapter 1-Basic ConceptsDocument21 pagesChapter 1-Basic ConceptsiangarvinsNo ratings yet
- Computed Tomography (CT) - Body: Temb 3109B Medical Imaging Sensing and Processing 1Document7 pagesComputed Tomography (CT) - Body: Temb 3109B Medical Imaging Sensing and Processing 1iangarvinsNo ratings yet
- Ian MicroelectronicsDocument20 pagesIan MicroelectronicsiangarvinsNo ratings yet
- Preliminary Proposal Group 38Document7 pagesPreliminary Proposal Group 38iangarvinsNo ratings yet
- Kyambogo University Faculty of EngineeringDocument17 pagesKyambogo University Faculty of EngineeringiangarvinsNo ratings yet
- Designof A Mechanical Hands Free Door Opener To Eliminate Infection Transmission Through Door HandlesDocument10 pagesDesignof A Mechanical Hands Free Door Opener To Eliminate Infection Transmission Through Door HandlesiangarvinsNo ratings yet
- Kyambogo University Faculty of Engineering Department of Electrical and Electronics EngineeringDocument10 pagesKyambogo University Faculty of Engineering Department of Electrical and Electronics EngineeringiangarvinsNo ratings yet
- Endoscopy Computer ReportDocument1 pageEndoscopy Computer ReportiangarvinsNo ratings yet
- ATO SG Series Servo Driver User ManualDocument48 pagesATO SG Series Servo Driver User ManualiangarvinsNo ratings yet
- 1.1 Measurement TutorialDocument8 pages1.1 Measurement TutorialiangarvinsNo ratings yet
- Applied Chemistry Lecture FF-1Document39 pagesApplied Chemistry Lecture FF-1iangarvinsNo ratings yet
- Applied Chemistry MCQsDocument10 pagesApplied Chemistry MCQsiangarvins100% (1)
- Proposed Mechatronics and Biomedical Engineering With Minor CorrectionsDocument138 pagesProposed Mechatronics and Biomedical Engineering With Minor Correctionsiangarvins100% (1)
- Special Theory of ReletivityDocument41 pagesSpecial Theory of ReletivityRM FakharNo ratings yet
- Power Upgrading of Transmission Lines by Combining Ac & DCDocument68 pagesPower Upgrading of Transmission Lines by Combining Ac & DCrashidmd42100% (2)
- Rajnidhi Project WorkDocument35 pagesRajnidhi Project WorkRAJ NIDHINo ratings yet
- Fundamentals of SpectrophotometryDocument56 pagesFundamentals of SpectrophotometryNORMA PATRICIA SANCHEZ LONDOÑO100% (1)
- Physics - Burglar AlarmDocument4 pagesPhysics - Burglar AlarmduderamNo ratings yet
- Presentation of GOFADocument13 pagesPresentation of GOFAKnigh RiderNo ratings yet
- CAT - G3516H Intake Manifold Air Temperature Is High PDFDocument5 pagesCAT - G3516H Intake Manifold Air Temperature Is High PDFwagner_guimarães_1No ratings yet
- Bpsu Header FooterDocument20 pagesBpsu Header FooterWilson Domingo Lazarte0% (1)
- Juan J. Ramirez, M. Keith Matzen and Dillon H. McDaniel - Pulsed Power Drivers For ICF and High Energy Density PhysicsDocument18 pagesJuan J. Ramirez, M. Keith Matzen and Dillon H. McDaniel - Pulsed Power Drivers For ICF and High Energy Density PhysicsCola7890No ratings yet
- Optimize Your Energy and Building Management Systems Throughout Your FacilitiesDocument2 pagesOptimize Your Energy and Building Management Systems Throughout Your FacilitiesMustafa TantawyNo ratings yet
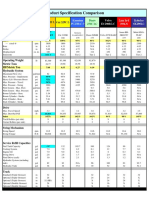
- Product Specification Comparison: Cat 325D L Cat 325C L EngineDocument2 pagesProduct Specification Comparison: Cat 325D L Cat 325C L EngineDANIEL VARGAS RODRIGUEZNo ratings yet
- Vic-Tap II Hole Cutting Tool For 4 - 8"/100 - 200mm Carbon Steel PipeDocument1 pageVic-Tap II Hole Cutting Tool For 4 - 8"/100 - 200mm Carbon Steel PipeHeiderHuertaNo ratings yet
- Nunn v. Duke Power Co., 84-ERA-27 (DepDocument7 pagesNunn v. Duke Power Co., 84-ERA-27 (DepSandra TrentNo ratings yet
- Backhoe Operator AssessmentDocument27 pagesBackhoe Operator AssessmentGermain DgermainNo ratings yet
- Hes 1250 2015Document74 pagesHes 1250 2015SAUL OSPINONo ratings yet
- 950H, 962H and IT62H Wheel Loader Hydraulic System: Command Control SteeringDocument2 pages950H, 962H and IT62H Wheel Loader Hydraulic System: Command Control SteeringTeofilo Paredes CosmeNo ratings yet
- Fertilizer Policy in IndiaDocument242 pagesFertilizer Policy in IndiaArun D PaulNo ratings yet
- Pheenix Alpha Product Folder AD12 - 4 PagesDocument3 pagesPheenix Alpha Product Folder AD12 - 4 PagesTramuntana FortaNo ratings yet
- Charging SystemDocument10 pagesCharging SystemSteven Andrew ElamparoNo ratings yet
- Oriented Strand Board: Product GuideDocument12 pagesOriented Strand Board: Product GuideDillonNo ratings yet
- Instrucciones LavadoraDocument48 pagesInstrucciones LavadoraCristina Torrecilla AlisteNo ratings yet
- OL32S LED Low Intensity Single Obstruction Light - Datasheet - v202008Document2 pagesOL32S LED Low Intensity Single Obstruction Light - Datasheet - v202008REDDOT SIGNALNo ratings yet
- S4030 600F111001FVDocument290 pagesS4030 600F111001FVШибко ЯрикNo ratings yet
- Parts and SuppliesDocument74 pagesParts and SuppliesErmilo LopezNo ratings yet
- 2005 Mendoza Pranic FacialDocument4 pages2005 Mendoza Pranic FacialRaghu100% (1)
- My Recent Responsibilities Were Mainly ToDocument5 pagesMy Recent Responsibilities Were Mainly Tocherif yahyaouiNo ratings yet
- Smockb Assignment1Document5 pagesSmockb Assignment1api-317462017No ratings yet
- Vent Terminals - UpCodesDocument6 pagesVent Terminals - UpCodesXAVIER RUBIONo ratings yet