Download as docx, pdf, or txt
You might also like
- Image Processing Question Answer BankDocument54 pagesImage Processing Question Answer Bankchris rubishaNo ratings yet
- Digital Image Processing: Lab Assignements #2: Image Filtering in The Spatial Domain and Fourier TransformDocument4 pagesDigital Image Processing: Lab Assignements #2: Image Filtering in The Spatial Domain and Fourier Transformraw.junkNo ratings yet
- Multi Resolution Based Fusion Using Discrete Wavelet Transform.Document27 pagesMulti Resolution Based Fusion Using Discrete Wavelet Transform.saranrajNo ratings yet
- Ipmv NotesDocument125 pagesIpmv Notessniper x4848 PillaiNo ratings yet
- Image Enhancement Frequency DomainDocument42 pagesImage Enhancement Frequency Domainresmi_ng100% (2)
- Basics of Image ProcessingDocument38 pagesBasics of Image ProcessingKarthick VijayanNo ratings yet
- DigitalImageFundamentalas GMDocument50 pagesDigitalImageFundamentalas GMvpmanimcaNo ratings yet
- Computer Vision NotesDocument97 pagesComputer Vision NotesNs100% (1)
- Image InterpolationDocument6 pagesImage InterpolationAshimaGargNo ratings yet
- Presentation About Edge DetectionDocument23 pagesPresentation About Edge DetectionUvasre SundarNo ratings yet
- Opencv Interview QuestionsDocument3 pagesOpencv Interview QuestionsYogesh YadavNo ratings yet
- Digital Image ProcessingDocument4 pagesDigital Image ProcessingSedu Madavan100% (3)
- JNTU Old Question Papers 2007Document5 pagesJNTU Old Question Papers 2007Srinivasa Rao GNo ratings yet
- Image Segmentation, Representation and DescriptionDocument40 pagesImage Segmentation, Representation and DescriptionButta Rajasekhar100% (1)
- Computer Vision-Unit 1 NotesDocument21 pagesComputer Vision-Unit 1 NotesNs100% (1)
- 1.1 - CEC342 - Common Types of Analog and Mixed - Signal Circuits - Applications of Mixed-Signal CircuitsDocument6 pages1.1 - CEC342 - Common Types of Analog and Mixed - Signal Circuits - Applications of Mixed-Signal CircuitsSriram Sundar SubramanianNo ratings yet
- Communication Lab Course Plan Ec8561Document4 pagesCommunication Lab Course Plan Ec8561heraldNo ratings yet
- Extracting Features From The Fundus Image Using Canny Edge Detection Method For PreDetection of Diabetic RetinopathyDocument6 pagesExtracting Features From The Fundus Image Using Canny Edge Detection Method For PreDetection of Diabetic RetinopathyVIVA-TECH IJRINo ratings yet
- MCQ Set2 PTSPDocument2 pagesMCQ Set2 PTSPPrabhakara RaoNo ratings yet
- Image Compression Coding SchemesDocument96 pagesImage Compression Coding Schemesresmi_ng50% (4)
- Basics of Image Processing in Matlab Lab File PDFDocument86 pagesBasics of Image Processing in Matlab Lab File PDFjagroop kaurNo ratings yet
- EC2029-Digital Image Processing Two Marks Questions and Answers - New PDFDocument20 pagesEC2029-Digital Image Processing Two Marks Questions and Answers - New PDFNathan Bose Thiruvaimalar NathanNo ratings yet
- Chapter 6. Image SegmentationDocument83 pagesChapter 6. Image SegmentationĐình HạnhNo ratings yet
- DSP (18EC52) Course File PlanningDocument7 pagesDSP (18EC52) Course File PlanningShravan KumarNo ratings yet
- Image Enhancement-Spatial Filtering From: Digital Image Processing, Chapter 3Document56 pagesImage Enhancement-Spatial Filtering From: Digital Image Processing, Chapter 3Jaunty_UNo ratings yet
- Chapter 2 Digital Image FundamantelsDocument58 pagesChapter 2 Digital Image FundamantelsVimal KumarNo ratings yet
- Fundamentals of Image Processing Lab Manual 2014 PDFDocument68 pagesFundamentals of Image Processing Lab Manual 2014 PDFSagar PatelNo ratings yet
- Digital Image Processing MATLAB NotesDocument26 pagesDigital Image Processing MATLAB NotesSeun -nuga DanielNo ratings yet
- Digital Image Processing FileDocument26 pagesDigital Image Processing FileAviral ChaurasiaNo ratings yet
- Computer Vision Lab Manual 2023Document63 pagesComputer Vision Lab Manual 2023VivekSinh RajputNo ratings yet
- Wavelets and Multiresolution: by Dr. Mahua BhattacharyaDocument39 pagesWavelets and Multiresolution: by Dr. Mahua BhattacharyashubhamNo ratings yet
- 16 Bit Comparator Using 4 Bit ComparatorsDocument7 pages16 Bit Comparator Using 4 Bit ComparatorsSudhakara RaoNo ratings yet
- DCOM Lab ManualDocument38 pagesDCOM Lab ManualGaurav Kalra0% (1)
- Digital Image Processing by Annapurna Mishra 327ed4Document208 pagesDigital Image Processing by Annapurna Mishra 327ed4SWABHIMAN SINGH PARIDANo ratings yet
- National Institute of Technology Rourkela: Answer All Questions. Figures in The Right Hand Margin Indicate MarksDocument3 pagesNational Institute of Technology Rourkela: Answer All Questions. Figures in The Right Hand Margin Indicate MarksAyusna SubudhiNo ratings yet
- Region Filling (RF & FF)Document3 pagesRegion Filling (RF & FF)Ansuman MahantyNo ratings yet
- EC8093 Unit 2Document136 pagesEC8093 Unit 2Santhosh PaNo ratings yet
- CH 2 Raster Scan GraphicsDocument23 pagesCH 2 Raster Scan GraphicskanchangawndeNo ratings yet
- DIP Question BankDocument9 pagesDIP Question Bankapi-3772517No ratings yet
- BM2406 Digital Image Processing Lab ManualDocument107 pagesBM2406 Digital Image Processing Lab ManualDeepak DennisonNo ratings yet
- Multi Rate DSPDocument41 pagesMulti Rate DSPrekhakasiraman100% (2)
- Fundamentals of Image Processing Lab Manual SET 1Document27 pagesFundamentals of Image Processing Lab Manual SET 1Reza ArraffiNo ratings yet
- Topic 2 Goal Tree and Problem SolvingDocument59 pagesTopic 2 Goal Tree and Problem Solvingﻣﺤﻤﺪ الخميسNo ratings yet
- Dica Question BankDocument4 pagesDica Question BankOmprakash KuswahaNo ratings yet
- Assignment 2 DIP 2019Document9 pagesAssignment 2 DIP 2019abhinav kumarNo ratings yet
- Iare DWDM PPT CseDocument249 pagesIare DWDM PPT CseSalmanNo ratings yet
- Updated - DSP Lab ManualDocument116 pagesUpdated - DSP Lab ManualKushagraNo ratings yet
- DSP QBDocument7 pagesDSP QBRoopa Nayak100% (1)
- MPMC Lab Manual To PrintDocument138 pagesMPMC Lab Manual To PrintKasthuri SelvamNo ratings yet
- Assignments - NOC - MATLAB Programming For Numerical ComputationDocument9 pagesAssignments - NOC - MATLAB Programming For Numerical ComputationPraghashrajaNo ratings yet
- Question BankDocument37 pagesQuestion BankViren PatelNo ratings yet
- Biomedical Signal ProcessingDocument2 pagesBiomedical Signal ProcessingManasa Patel N100% (1)
- Deep Learning Techniques NotesDocument42 pagesDeep Learning Techniques NotesVeera Nageswaran GNo ratings yet
- Image ProcessingDocument39 pagesImage ProcessingawaraNo ratings yet
- Pruning: Advanced Topic in Image ProcessingDocument191 pagesPruning: Advanced Topic in Image ProcessingQaisar Ayub Sheikh100% (2)
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsFrom EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsNo ratings yet
- Unit 3Document9 pagesUnit 3dixit.ramani7773No ratings yet
- Lect3 6Document15 pagesLect3 6Chandan KumarNo ratings yet
- Digital Image ProcessinfDocument52 pagesDigital Image ProcessinfAISWARYA MNo ratings yet
- 1.explain The Adaptive FiltersDocument6 pages1.explain The Adaptive FiltersShay Patrick CormacNo ratings yet
- FON Question BankDocument1 pageFON Question BankLohit PNo ratings yet
- Atssl 18 Internship PDFDocument18 pagesAtssl 18 Internship PDFLohit PNo ratings yet
- AptitudeDocument18 pagesAptitudeLohit PNo ratings yet
- AttachmentDocument1 pageAttachmentLohit PNo ratings yet
- Embedded Controller Lab Viva 2Document2 pagesEmbedded Controller Lab Viva 2Lohit PNo ratings yet
- License Plate Image Super-Resolution Based On Convolutional Neural NetworkDocument5 pagesLicense Plate Image Super-Resolution Based On Convolutional Neural NetworkLohit PNo ratings yet
- Floating Solar Plant: BY LOHIT P (1AM15EC058) Under The Guidance of Asst - Prof.Prathiba KiranDocument18 pagesFloating Solar Plant: BY LOHIT P (1AM15EC058) Under The Guidance of Asst - Prof.Prathiba KiranLohit PNo ratings yet
- Floating Solar Plant: BY LOHIT P (1AM15EC058) Under The Guidance of Asst - Prof.Prathiba KiranDocument18 pagesFloating Solar Plant: BY LOHIT P (1AM15EC058) Under The Guidance of Asst - Prof.Prathiba KiranLohit PNo ratings yet
- Vlsi Part A ManualDocument47 pagesVlsi Part A ManualLohit PNo ratings yet
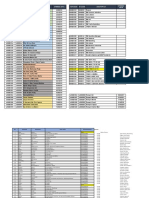
- Sap Code B1 Code Description Opening Date Sap Code B1 Code Description Opening DateDocument9 pagesSap Code B1 Code Description Opening Date Sap Code B1 Code Description Opening DateJL DulanaNo ratings yet
- Polar Fire FPGADatasheetDocument86 pagesPolar Fire FPGADatasheetMarsupjoNo ratings yet
- Test Bank For Modern Electronic Communication 9th Edition Jeff Beasley DownloadDocument10 pagesTest Bank For Modern Electronic Communication 9th Edition Jeff Beasley DownloadStephanie Branch100% (33)
- Onkyo tx-nr3008 SM and Parts PDFDocument218 pagesOnkyo tx-nr3008 SM and Parts PDFSergey VissarionovNo ratings yet
- Circuits RFDocument48 pagesCircuits RFYans SounaNo ratings yet
- Computer Programming & Application (CSC430) : Introduction To ComputersDocument48 pagesComputer Programming & Application (CSC430) : Introduction To ComputersMohamad ZackuanNo ratings yet
- Configure Single-Area OSPFv2Document12 pagesConfigure Single-Area OSPFv2Mohammed AkeelNo ratings yet
- RTN 1 System DescriptionDocument31 pagesRTN 1 System DescriptionTinamooNo ratings yet
- Data Sheet 6ES7215-1BG40-0XB0: General InformationDocument9 pagesData Sheet 6ES7215-1BG40-0XB0: General InformationrezaNo ratings yet
- Idle Mode OperationDocument7 pagesIdle Mode OperationalopaliaNo ratings yet
- Radio-Data CommunicationDocument83 pagesRadio-Data CommunicationEvansNo ratings yet
- Welcome To The LTE CPE!: Online HelpDocument44 pagesWelcome To The LTE CPE!: Online HelpJohn Vincent Macatangay CleofeNo ratings yet
- Operation Manual: Rabigh II Project Interconnecting Package (UO1)Document18 pagesOperation Manual: Rabigh II Project Interconnecting Package (UO1)dodonggNo ratings yet
- School Ict - Action PlanDocument4 pagesSchool Ict - Action PlanEmilia MalabananNo ratings yet
- FDD LTE Handover OptimizationDocument35 pagesFDD LTE Handover OptimizationmunzewNo ratings yet
- LED and Photo DiodeDocument8 pagesLED and Photo DiodePrabin JoseNo ratings yet
- Vestel 17MB21Document60 pagesVestel 17MB21f17439100% (1)
- THH12 Transmitter (Rev A)Document6 pagesTHH12 Transmitter (Rev A)Nilson CruzNo ratings yet
- Introduction To ICT: Lecture No 14 Ms - Sara FareedDocument29 pagesIntroduction To ICT: Lecture No 14 Ms - Sara FareedHaidarNo ratings yet
- TLSDocument2 pagesTLSSalman ShahidNo ratings yet
- Mi TV 2 55': Take Out Components Take Out TV According To The ImageDocument5 pagesMi TV 2 55': Take Out Components Take Out TV According To The Imagenitin9860No ratings yet
- KPI HuaweiDocument35 pagesKPI HuaweiArio Nugroho100% (1)
- Serato Video Software Manual For Serato DJ PDFDocument27 pagesSerato Video Software Manual For Serato DJ PDFSt. thachnghuuNo ratings yet
- Embedded System Lab Manual: B.Tech (Cse) Vi SemesterDocument56 pagesEmbedded System Lab Manual: B.Tech (Cse) Vi Semesterjesudosss0% (1)
- Isc 2SC3229: Silicon NPN Power TransistorDocument2 pagesIsc 2SC3229: Silicon NPN Power TransistormiguelNo ratings yet
- SAWFilter PDFDocument350 pagesSAWFilter PDFCube7 GeronimoNo ratings yet
- STM8S903K3Document116 pagesSTM8S903K3SOLUCIÓN ELECTRÓNICANo ratings yet
- Intel WiFi 6E AX210 Extended Temp Industrial Module - Product Brief - 0622Document3 pagesIntel WiFi 6E AX210 Extended Temp Industrial Module - Product Brief - 0622Nhân Huỳnh ThiệnNo ratings yet
- Registration Form No. 1 For The Fonavi Return ProcessDocument2 pagesRegistration Form No. 1 For The Fonavi Return ProcessScribdTranslationsNo ratings yet
- 3com Wireless 8760 Dual-Radio 11A/B/G Poe Access PointDocument8 pages3com Wireless 8760 Dual-Radio 11A/B/G Poe Access PointLuis Antonio Hernandez CastroNo ratings yet