Download as pdf or txt
You might also like
- Assignment 1: Chiranjeev Sharma A2324717001 Btech Cse+ Mba 7cse3Document13 pagesAssignment 1: Chiranjeev Sharma A2324717001 Btech Cse+ Mba 7cse3chiranjeev sharma100% (1)
- Deep Learning Based Eye Gaze Tracking For Automotive Applications An Auto-Keras ApproachDocument4 pagesDeep Learning Based Eye Gaze Tracking For Automotive Applications An Auto-Keras ApproachVibhor ChaubeyNo ratings yet
- Driver Drowsiness Recognition Based On Computer Vision TechnologyDocument9 pagesDriver Drowsiness Recognition Based On Computer Vision TechnologyBalaji Raja RajanNo ratings yet
- Driver Drowsiness Detection SystemDocument5 pagesDriver Drowsiness Detection SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 2 20 20behavior Based 20driver 20fatigue 20detection 20system 20with 20deep 20beliefDocument13 pages2 20 20behavior Based 20driver 20fatigue 20detection 20system 20with 20deep 20beliefcstoajfuNo ratings yet
- Real-Time Analysis of AthletesDocument11 pagesReal-Time Analysis of AthletesMaxwell Nunes do CarmoNo ratings yet
- PA-GAN: A Patch-Attention Based Aggregation Network For Face Recognition in SurveillanceDocument10 pagesPA-GAN: A Patch-Attention Based Aggregation Network For Face Recognition in SurveillanceGOURISREE MNo ratings yet
- Exploring Representation Learning With CNNsDocument8 pagesExploring Representation Learning With CNNsItem SongsNo ratings yet
- Journal of Xi Dian UniversityDocument7 pagesJournal of Xi Dian Universitytwiha000No ratings yet
- Real-Time Driver Drowsiness Detection System Based On PERCLOS and Grayscale Image ProcessingDocument4 pagesReal-Time Driver Drowsiness Detection System Based On PERCLOS and Grayscale Image Processingrohansain.mcaNo ratings yet
- Partially Covered Face Detection in Presence of Headscarf For Surveillance ApplicationsDocument5 pagesPartially Covered Face Detection in Presence of Headscarf For Surveillance Applicationsdineth.gdNo ratings yet
- Real-Time Driver Drowsiness Detection Using Deep LearningDocument7 pagesReal-Time Driver Drowsiness Detection Using Deep LearningVishal LabdeNo ratings yet
- DDD MYdocsDocument68 pagesDDD MYdocskarthikeyan RNo ratings yet
- Sambre Kar 2015Document6 pagesSambre Kar 2015DHRUBAJIT KAKATINo ratings yet
- DDD Final MYdocsDocument68 pagesDDD Final MYdocskarthikeyan RNo ratings yet
- Driver Safety Development: Real-Time Driver Drowsiness Detection System Based On Convolutional Neural NetworkDocument10 pagesDriver Safety Development: Real-Time Driver Drowsiness Detection System Based On Convolutional Neural Networknirmala periasamyNo ratings yet
- Correlation Method Based PCA Subspace Using Accelerated Binary Particle Swarm Optimization For Enhanced Face RecognitionDocument4 pagesCorrelation Method Based PCA Subspace Using Accelerated Binary Particle Swarm Optimization For Enhanced Face RecognitionEditor IJRITCCNo ratings yet
- Real-Time Driver-Drowsiness Detection System Using Facial FeaturesDocument12 pagesReal-Time Driver-Drowsiness Detection System Using Facial FeaturesthefakestudentNo ratings yet
- On Computer Vision For Augmented RealityDocument4 pagesOn Computer Vision For Augmented RealityAditya IyerNo ratings yet
- Padmanabhan-Kanchikere2019 Article AnEfficientFaceRecognitionSystDocument21 pagesPadmanabhan-Kanchikere2019 Article AnEfficientFaceRecognitionSystananthaNo ratings yet
- Kumar 2016 Article Real-TimeVisionBasedDriverDrowDocument12 pagesKumar 2016 Article Real-TimeVisionBasedDriverDrowKumar RajamaniNo ratings yet
- Driver MonitoringDocument3 pagesDriver MonitoringJournalNX - a Multidisciplinary Peer Reviewed Journal100% (1)
- Microcontroller Based Automatic Face Recognition Attendance SystemDocument6 pagesMicrocontroller Based Automatic Face Recognition Attendance SystemdreamfxNo ratings yet
- Editorial: Introduction To The Special Issue On Innovative Applications of Computer VisionDocument2 pagesEditorial: Introduction To The Special Issue On Innovative Applications of Computer VisionasddsdsaNo ratings yet
- Yolo 5Document9 pagesYolo 5Julio RosalesNo ratings yet
- Background Study and Literature ReviewDocument22 pagesBackground Study and Literature ReviewHafizuddin TarmiziNo ratings yet
- Webcam-Based Eye Movement Analysis Using CNNDocument7 pagesWebcam-Based Eye Movement Analysis Using CNNikram iwanNo ratings yet
- Real-Time Driver's Drowsiness Monitoring Based On Dynamically Varying ThresholdDocument6 pagesReal-Time Driver's Drowsiness Monitoring Based On Dynamically Varying ThresholdLakshay SharmaNo ratings yet
- (IJETA-V8I2P7) :MD - Noman Habib KhanDocument8 pages(IJETA-V8I2P7) :MD - Noman Habib KhanIJETA - EighthSenseGroupNo ratings yet
- A Framework For Real-Time Face-Recognition - 8965805 PDFDocument4 pagesA Framework For Real-Time Face-Recognition - 8965805 PDFManju Ancy John ImmanuelNo ratings yet
- Driver'S Drowsiness Detection System: Bachelor of Technology in Computer Science and Engineering byDocument18 pagesDriver'S Drowsiness Detection System: Bachelor of Technology in Computer Science and Engineering byShanker Yadav0% (1)
- Driver Sleepiness Detection System ReportDocument22 pagesDriver Sleepiness Detection System Reportdanishkamaal48No ratings yet
- BP 2Document6 pagesBP 219-4G0 BINDHU MADHAV SAINo ratings yet
- Towards Real-Time Smile Detection Based On Faster Region Convolutional Neural NetworkDocument6 pagesTowards Real-Time Smile Detection Based On Faster Region Convolutional Neural NetworkPhuong NghiemNo ratings yet
- A Real Time Deep Learning Based Driver Monitoring SystemDocument6 pagesA Real Time Deep Learning Based Driver Monitoring Systemmulyadi samadiNo ratings yet
- Fuhl16 MvaDocument14 pagesFuhl16 Mvatamas.ingridNo ratings yet
- Driver Drowsiness Detection System Published Review PaperDocument3 pagesDriver Drowsiness Detection System Published Review PaperShivangi SrivastavaNo ratings yet
- Facial Recognition Based On Enhanced Neural NetworkDocument10 pagesFacial Recognition Based On Enhanced Neural NetworkIAES IJAINo ratings yet
- Review and Comparison of Face Detection Algorithms: Kirti Dang Shanu SharmaDocument5 pagesReview and Comparison of Face Detection Algorithms: Kirti Dang Shanu SharmaKevin EnriquezNo ratings yet
- Distributed Face Recognition Via Consensus On SEDocument14 pagesDistributed Face Recognition Via Consensus On SEThiravia SelviNo ratings yet
- Kahlon2018 PDFDocument7 pagesKahlon2018 PDFAmanNo ratings yet
- Kahlon2018 PDFDocument7 pagesKahlon2018 PDFAmanNo ratings yet
- Face Detection Tracking OpencvDocument6 pagesFace Detection Tracking OpencvMohamed ShameerNo ratings yet
- Image Processing Application For Vehicle Seat Vacancy IdentificationDocument5 pagesImage Processing Application For Vehicle Seat Vacancy IdentificationEditor IJTSRDNo ratings yet
- Improvements of Driver Fatigue Detection System Based On Eye Tracking and Dynamic Template MatchingDocument10 pagesImprovements of Driver Fatigue Detection System Based On Eye Tracking and Dynamic Template MatchingsherrysherryNo ratings yet
- Using Mask R CNN To Isolate PV Panels From Background Object in ImagesDocument5 pagesUsing Mask R CNN To Isolate PV Panels From Background Object in ImagesEditor IJTSRDNo ratings yet
- Project Review - Final B187Document15 pagesProject Review - Final B187Indigo ViratNo ratings yet
- Ias 1660-4556Document10 pagesIas 1660-4556ravindu deshithaNo ratings yet
- A Comparison of Face Recognition AlgorithmDocument4 pagesA Comparison of Face Recognition AlgorithmErvin MoungNo ratings yet
- Iris Recognition Using Machine Learning From Smartphone Captured Images in Visible LightDocument5 pagesIris Recognition Using Machine Learning From Smartphone Captured Images in Visible LightHANUMANTH RAJU R KNo ratings yet
- Face Verification Based On Convolutional Neural Network and Deep LearningDocument5 pagesFace Verification Based On Convolutional Neural Network and Deep LearningSilicon DaltonNo ratings yet
- Computer Vision Techniques For Vehicular Accident Detection A Brief ReviewDocument7 pagesComputer Vision Techniques For Vehicular Accident Detection A Brief ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 14 01DrowsyDeepNN PDFDocument5 pages14 01DrowsyDeepNN PDFKeerthiNo ratings yet
- Real-Time System For Driver Fatigue Detection Based On A Recurrent Neuronal NetworkDocument15 pagesReal-Time System For Driver Fatigue Detection Based On A Recurrent Neuronal NetworkNguyễn Văn KhoaNo ratings yet
- An Efficient Convolutional Neural Network Approach For Facial RecognitionDocument6 pagesAn Efficient Convolutional Neural Network Approach For Facial RecognitionBihari Lal GuptaNo ratings yet
- Wike WindriyaniDocument7 pagesWike WindriyaniDean FitrahNo ratings yet
- TemporalMotionlessanalysis - MIsba SiddiquiDocument30 pagesTemporalMotionlessanalysis - MIsba SiddiquiMisba SiddiquiNo ratings yet
- Neuromorphic Driver Monitoring Systems A Proof-of-Concept For Yawn Detection and Seatbelt State Detection Using An Event CameraDocument11 pagesNeuromorphic Driver Monitoring Systems A Proof-of-Concept For Yawn Detection and Seatbelt State Detection Using An Event CameraJOSE DAVID VALDA PEÑARANDANo ratings yet
- 1106 3466 PDFDocument8 pages1106 3466 PDFLarbi NouarNo ratings yet
- Solutions Computer Control Systems PDFDocument116 pagesSolutions Computer Control Systems PDFDuvan Gonzalez SandovalNo ratings yet
- Or FileDocument11 pagesOr FileThenu SaranNo ratings yet
- An E#cient Data-Driven Fuzzy Approach To The Motion Planning Problem of A Mobile RobotDocument18 pagesAn E#cient Data-Driven Fuzzy Approach To The Motion Planning Problem of A Mobile RobothfnunezNo ratings yet
- Assignment - DCA1103 - BCA - 1 - Set 1and2 - March2022uDocument2 pagesAssignment - DCA1103 - BCA - 1 - Set 1and2 - March2022uGagan KumarNo ratings yet
- Daa FinalDocument84 pagesDaa FinalVanathi PriyadharshiniNo ratings yet
- Big Data MCQDocument4 pagesBig Data MCQs100% (1)
- 04 2nd Order ODE - The D OperatorDocument18 pages04 2nd Order ODE - The D OperatorOlabode EgbinolaNo ratings yet
- 1 - ML Introduction1Document23 pages1 - ML Introduction1Hriday ShettyNo ratings yet
- Diophantine Equations in Three VariablesDocument8 pagesDiophantine Equations in Three VariablesJacmNo ratings yet
- DSP - Unit 4 - DecimationDocument14 pagesDSP - Unit 4 - DecimationNaganarasaiah GoudNo ratings yet
- Data Mining: Dimensionality Reduction Pca - SVDDocument33 pagesData Mining: Dimensionality Reduction Pca - SVDArul Kumar VenugopalNo ratings yet
- Cormen SolutionDocument4 pagesCormen SolutionJaveria AkbarNo ratings yet
- A Novel Approach of Calculating Affective Cost in Cost Cognizant Regression TestingDocument5 pagesA Novel Approach of Calculating Affective Cost in Cost Cognizant Regression TestingeditorijaiemNo ratings yet
- Colibri GHComponentsDocument5 pagesColibri GHComponentsRaphaelNo ratings yet
- Homework 5Document3 pagesHomework 5Manoj BhatNo ratings yet
- Traditional Symmetric-Key CiphersDocument74 pagesTraditional Symmetric-Key Cipherssatish naikawadiNo ratings yet
- Artificial Neural Network Genetic AlgorithmDocument4 pagesArtificial Neural Network Genetic AlgorithmSeema GaudeNo ratings yet
- HW 04 ExtraDocument5 pagesHW 04 ExtraDavid Esteban Martin AcostaNo ratings yet
- A Review On Machine Learning TechniquesDocument5 pagesA Review On Machine Learning TechniquesEditor IJRITCCNo ratings yet
- Management Science Chapter 11Document42 pagesManagement Science Chapter 11Myuran SivarajahNo ratings yet
- Factoring GCF and Difference of Two SquaresDocument23 pagesFactoring GCF and Difference of Two SquaresMarkyyy 1121No ratings yet
- Data Structures and Algorithms: S Aswin 17BCE1201Document15 pagesData Structures and Algorithms: S Aswin 17BCE1201S AswinNo ratings yet
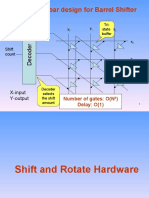
- NXN Crossbar Design For Barrel Shifter: X-Input Y-OutputDocument18 pagesNXN Crossbar Design For Barrel Shifter: X-Input Y-Outputhamza abbasNo ratings yet
- Question BankDocument3 pagesQuestion BankMuhammad HasnainNo ratings yet
- Derivation of The IMM Filter: K K K 1 K K K K K K KDocument6 pagesDerivation of The IMM Filter: K K K 1 K K K K K K Ksüleyman fatih KaraNo ratings yet
- Risk and ReturnDocument2 pagesRisk and ReturnজহিরুলইসলামশোভনNo ratings yet
- Daa - Mini - Project (1) OrginalDocument21 pagesDaa - Mini - Project (1) OrginalHarsh GuptaNo ratings yet
- Haenel Et AlDocument13 pagesHaenel Et AlMartí Berenguer MimóNo ratings yet
- Multivariable Calculus Stewart 7th Edition Test BankDocument7 pagesMultivariable Calculus Stewart 7th Edition Test Banktonyescobarrgfqajydwc100% (42)