Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Pt6a Engine Training OverwiewDocument20 pagesPt6a Engine Training OverwiewRafael Alves Dos Santos100% (1)
- 1 PBDocument10 pages1 PBKucinx GaronkNo ratings yet
- Ship RackingDocument134 pagesShip RackingKucinx GaronkNo ratings yet
- Larsen 1997Document29 pagesLarsen 1997Kucinx GaronkNo ratings yet
- D1 Lines Plan Farhan Fathurakhman Fix Ya AllahDocument1 pageD1 Lines Plan Farhan Fathurakhman Fix Ya AllahKucinx GaronkNo ratings yet
- 1 PBDocument10 pages1 PBKucinx GaronkNo ratings yet
- 1 s2.0 S1290072916318245 MainDocument14 pages1 s2.0 S1290072916318245 MainKucinx GaronkNo ratings yet
- 1 s2.0 S002980181832119X MainDocument10 pages1 s2.0 S002980181832119X MainKucinx GaronkNo ratings yet
- 1 s2.0 S221416691500034X MainDocument19 pages1 s2.0 S221416691500034X MainKucinx GaronkNo ratings yet
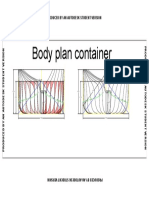
- Body Plan Container: Produced by An Autodesk Student VersionDocument1 pageBody Plan Container: Produced by An Autodesk Student VersionKucinx GaronkNo ratings yet
- Shear Stress Due To Shear Load (Pure Bending) Multi-Cell Closed Cross-SectionDocument4 pagesShear Stress Due To Shear Load (Pure Bending) Multi-Cell Closed Cross-SectionKucinx GaronkNo ratings yet
- Design 1 - MUHAMAD HUMAM SAFI'IDocument1 pageDesign 1 - MUHAMAD HUMAM SAFI'IKucinx GaronkNo ratings yet
- Data Kapal Design 1 Ganjl 2020Document5 pagesData Kapal Design 1 Ganjl 2020Kucinx GaronkNo ratings yet
- What Is A Hull Roughness Analyzer and How Is A Ship's Hull Roughness Measured - PDFDocument9 pagesWhat Is A Hull Roughness Analyzer and How Is A Ship's Hull Roughness Measured - PDFKucinx GaronkNo ratings yet
- Notes 16 Torsion Prop PDFDocument17 pagesNotes 16 Torsion Prop PDFKucinx GaronkNo ratings yet
- Stability High Speed Craft ABS PDFDocument256 pagesStability High Speed Craft ABS PDFKucinx GaronkNo ratings yet
- Monotone Sequence and Sub SequenceDocument73 pagesMonotone Sequence and Sub SequenceTU Service CommissionNo ratings yet
- (Leafospirosis Deadly Disease From Rat: Fiqh Al-Hadith-Based Analysis) Leptospirosis Wabak Maut Dari Tikus: Analisis Berasaskan Fiqh Al-HadithDocument16 pages(Leafospirosis Deadly Disease From Rat: Fiqh Al-Hadith-Based Analysis) Leptospirosis Wabak Maut Dari Tikus: Analisis Berasaskan Fiqh Al-Hadith0050 MUHAMMAD HAIKAL BIN SAHARINo ratings yet
- Living Sexy With Allana Pratt (Episode 29) Wired For Success TVDocument24 pagesLiving Sexy With Allana Pratt (Episode 29) Wired For Success TVwiredforsuccesstvNo ratings yet
- Accepted Manuscript: Journal of King Saud University - ScienceDocument8 pagesAccepted Manuscript: Journal of King Saud University - ScienceFajar HutagalungNo ratings yet
- Nursong ResponsibilitiesDocument4 pagesNursong ResponsibilitiesMichaela JapsayNo ratings yet
- Anaphylaxis and Anaphylactic Shock: Marilyn T. HauptDocument13 pagesAnaphylaxis and Anaphylactic Shock: Marilyn T. Hauptlalo salazarNo ratings yet
- Basundhara Upadhayaya Structural Analysis ReportDocument63 pagesBasundhara Upadhayaya Structural Analysis ReportPoshan GautamNo ratings yet
- Study Master Life Sciences Teachers Guide Grade 10 9781107380509ARDocument225 pagesStudy Master Life Sciences Teachers Guide Grade 10 9781107380509ARmiltonellkayNo ratings yet
- UCCN2003 TCP/IP Internetworking UCCN2243 Internetworking Principles & PracticesDocument10 pagesUCCN2003 TCP/IP Internetworking UCCN2243 Internetworking Principles & PracticesKahtheresh MuruganNo ratings yet
- Roboshot Brochure enDocument19 pagesRoboshot Brochure envantuan17792No ratings yet
- Something ImpossibleDocument21 pagesSomething ImpossibleRegina BerengoltsNo ratings yet
- Daniel Throssell - How To Price-Anchor Like A BOSSSSSSDocument10 pagesDaniel Throssell - How To Price-Anchor Like A BOSSSSSSFox CopyNo ratings yet
- Vario 18Document92 pagesVario 18Miguel DiazNo ratings yet
- Interpreting Fits and Tolerances:: - by William B MoringDocument14 pagesInterpreting Fits and Tolerances:: - by William B Moringwillmors31No ratings yet
- Histochemistry ReportDocument7 pagesHistochemistry ReportThanashree ThanuNo ratings yet
- Thesis Statements: The Bad and The BetterDocument2 pagesThesis Statements: The Bad and The BetterKiraNo ratings yet
- IP Office Phones: Choices For Every Small BusinessDocument8 pagesIP Office Phones: Choices For Every Small BusinessTaher EzzyNo ratings yet
- Multi ChemDocument5 pagesMulti ChemKiran Kumar JhaNo ratings yet
- KB Workouts and Cardio WorkoutsDocument6 pagesKB Workouts and Cardio WorkoutsRob HammerNo ratings yet
- Huong Dan Su Dung Tieng VietDocument1 pageHuong Dan Su Dung Tieng VietĐình ThôngNo ratings yet
- Sarnafil S 327-20lchceDocument5 pagesSarnafil S 327-20lchceAhmed MontashNo ratings yet
- Electrolux EWW12753 7.5kg Washer 4.5kg Dryer Combo User ManualDocument40 pagesElectrolux EWW12753 7.5kg Washer 4.5kg Dryer Combo User ManualJohn Ray AbadNo ratings yet
- Cytojournal: Time For Evidence-Based CytologyDocument10 pagesCytojournal: Time For Evidence-Based CytologyAtikah RahmadhaniNo ratings yet
- Practical 06:-Write A Program in C To Translate 2D and 3D ObjectDocument5 pagesPractical 06:-Write A Program in C To Translate 2D and 3D ObjectKhan.aliNo ratings yet
- Computer Graphics I UNIT NotesDocument24 pagesComputer Graphics I UNIT Notesgouse1210100% (1)
- Oh! To Be Like Thee: WORDS: Thomas O. Chisholm, Pub.1897. MUSIC: William J. Kirkpatrick, 1897. Public DomainDocument1 pageOh! To Be Like Thee: WORDS: Thomas O. Chisholm, Pub.1897. MUSIC: William J. Kirkpatrick, 1897. Public DomainAlonge EmmanuelNo ratings yet
- Venus in Marriage2Document4 pagesVenus in Marriage2madhu77100% (1)
- List NotesDocument27 pagesList NotesMohit MauryaNo ratings yet
- HLS-220 D 750.23.5.028 (031033036043) - EnglischDocument13 pagesHLS-220 D 750.23.5.028 (031033036043) - EnglischRainNo ratings yet