Download as docx, pdf, or txt
You might also like
- LinuxCBT Key Files EditionDocument11 pagesLinuxCBT Key Files EditionMichael TNo ratings yet
- Chapter 3Document18 pagesChapter 3minichelagumas143No ratings yet
- 3 Assignment - LinuxDocument7 pages3 Assignment - LinuxzenkaevaaiymNo ratings yet
- Linux Device DriversDocument39 pagesLinux Device Driverscoolsam.sab100% (1)
- LinuxddDocument26 pagesLinuxddroc_rocNo ratings yet
- Hiding Files Using Kernel ModulesDocument22 pagesHiding Files Using Kernel ModulesCarlos Alberto Mendes BetinhoNo ratings yet
- Loadable Kernel Module - Character Device and Timer FunctionsDocument6 pagesLoadable Kernel Module - Character Device and Timer FunctionssofiawalgodecarranchoNo ratings yet
- Sol Unix 2Document35 pagesSol Unix 2srisylamNo ratings yet
- Character Device DriverDocument42 pagesCharacter Device DriverNaga ManjunathNo ratings yet
- Secure Machine Translate)Document24 pagesSecure Machine Translate)nvphucvnNo ratings yet
- AIX Boot ProcessDocument99 pagesAIX Boot ProcessBharat ThapaNo ratings yet
- Bootlin Kernel InitDocument16 pagesBootlin Kernel InitBurak GNo ratings yet
- Mechanism of Determining Page Faults Instantaneously Via Device Driver Based Approach in LinuxDocument13 pagesMechanism of Determining Page Faults Instantaneously Via Device Driver Based Approach in LinuxmaheshmddkNo ratings yet
- Topic 202 - System StartupDocument11 pagesTopic 202 - System StartupccokerNo ratings yet
- 101 - System ArchitectureDocument40 pages101 - System ArchitectureLegesse SamuelNo ratings yet
- Tutorial On Linux Device Driver: 1 BasicsDocument6 pagesTutorial On Linux Device Driver: 1 BasicscartamenesNo ratings yet
- UNIX Tech TipsDocument11 pagesUNIX Tech TipsmailtomanjuNo ratings yet
- Lpic 2Document28 pagesLpic 2vilese7No ratings yet
- Network Drivers LabDocument20 pagesNetwork Drivers LabAyesha BanuNo ratings yet
- Reference Manual (0.5) (2020.04.19) : OpencoreDocument16 pagesReference Manual (0.5) (2020.04.19) : Opencorethuplsrcjbndcigcvn twzhhqNo ratings yet
- Experiment 3Document56 pagesExperiment 3Ayusha JagtapNo ratings yet
- NotesDocument4 pagesNotesCheryle Aton Virtudazo Tiempo - DonaireNo ratings yet
- Nuttx 7 - 27 READMEDocument18 pagesNuttx 7 - 27 READMEwenNo ratings yet
- Red Hat Linux Installation and Root Password Cracking.Document89 pagesRed Hat Linux Installation and Root Password Cracking.Himani_Mittal_93No ratings yet
- LPIC 3 - Security Guide/Notes V 0.1 BetaDocument45 pagesLPIC 3 - Security Guide/Notes V 0.1 BetaJoao PachecoNo ratings yet
- BootingDocument14 pagesBootingvishalsolsheNo ratings yet
- Lab ManualDocument16 pagesLab ManualbvbkeshavNo ratings yet
- LinuxDocument36 pagesLinuxarun0076@gmail.comNo ratings yet
- FeatureDocument3 pagesFeatureDhipo AlamNo ratings yet
- Embedded Linux Workshop On Blueboard-AT91: B. Vasu DevDocument30 pagesEmbedded Linux Workshop On Blueboard-AT91: B. Vasu DevJOHNSON JOHNNo ratings yet
- Unit 1 - Embedded SystemDocument17 pagesUnit 1 - Embedded Systemrahulagraharivk18No ratings yet
- Configure Kernel Parameters: Section 10Document14 pagesConfigure Kernel Parameters: Section 10amitashokkumarNo ratings yet
- Tle TVL 9-12ia - CSS - Q1 - Wk5day1 - 4Document4 pagesTle TVL 9-12ia - CSS - Q1 - Wk5day1 - 4Jandeil GurreaNo ratings yet
- Unix Toolbox: 1 SystemDocument48 pagesUnix Toolbox: 1 Systemarevshar4779No ratings yet
- Jaimin-Boot Time Optimization in Embedded Linux PDFDocument23 pagesJaimin-Boot Time Optimization in Embedded Linux PDFjaimin23100% (1)
- Linux Device Driver DesignDocument8 pagesLinux Device Driver DesignhibouvnNo ratings yet
- CommandsDocument64 pagesCommandsharivasanthjNo ratings yet
- Tutorial DescTutorial-descDocument19 pagesTutorial DescTutorial-descErdet Nasufi100% (1)
- 6 - System Administration Concepts and TasksDocument7 pages6 - System Administration Concepts and TasksGodfreyNo ratings yet
- Solaris Questions and AnswersDocument25 pagesSolaris Questions and Answersankit0076No ratings yet
- Kernel FAQDocument24 pagesKernel FAQkislayakumarNo ratings yet
- Lab Manual 06 Kernel Modules PDFDocument11 pagesLab Manual 06 Kernel Modules PDFNehaNo ratings yet
- Ch.1 - Introduction: Study Guide To Accompany Operating Systems Concepts 9Document7 pagesCh.1 - Introduction: Study Guide To Accompany Operating Systems Concepts 9John Fredy Redondo MoreloNo ratings yet
- Rajesh Windows Interview Questions 1Document19 pagesRajesh Windows Interview Questions 1ramesh2440No ratings yet
- Linuxengines Blogspot inDocument9 pagesLinuxengines Blogspot inShitesh SachanNo ratings yet
- 8 - Character Device DriversDocument44 pages8 - Character Device Driversvenki_pinki100% (1)
- Chapter 21Document14 pagesChapter 21ak.microsoft20056613No ratings yet
- ELC Multi Processor FPGA Linux Chris Martin 0316 PDFDocument42 pagesELC Multi Processor FPGA Linux Chris Martin 0316 PDFMircea GogaNo ratings yet
- Users and Groups: Files Related To User/groupDocument12 pagesUsers and Groups: Files Related To User/groupfaruqNo ratings yet
- Lecture 5: Unix Startup Configuration: Asoc. Prof. Guntis Barzdins Asist. Girts FolkmanisDocument96 pagesLecture 5: Unix Startup Configuration: Asoc. Prof. Guntis Barzdins Asist. Girts FolkmanisrosshushNo ratings yet
- Linux Device Driver Lab4part - BDocument6 pagesLinux Device Driver Lab4part - BVinod GuptaNo ratings yet
- Cheat CodesDocument9 pagesCheat CodessickmouseNo ratings yet
- Firewall Lab SessionDocument31 pagesFirewall Lab SessionRohan KatariaNo ratings yet
- CS330 Operating System Part IVDocument13 pagesCS330 Operating System Part IVHarsh BihanyNo ratings yet
- Type: OS Fiche 3-Annexe 3 Sujet D'étude: Taking Advantage of Linux Capabilities. Durée: 20 Min. Auteur: Michael Bacarella Résumé: Linux CapabilitiesDocument14 pagesType: OS Fiche 3-Annexe 3 Sujet D'étude: Taking Advantage of Linux Capabilities. Durée: 20 Min. Auteur: Michael Bacarella Résumé: Linux CapabilitiesIct labNo ratings yet
- Test: Sun Systems Fault Analysis Workshop: Online AssessmentDocument21 pagesTest: Sun Systems Fault Analysis Workshop: Online Assessmentulrich nobel kouaméNo ratings yet
- Sinstallation: Eucalyptus InstallationDocument11 pagesSinstallation: Eucalyptus InstallationSaravanaRaajaaNo ratings yet
- PlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12From EverandPlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12No ratings yet
- Ion ExchangeDocument12 pagesIon ExchangepruthvishNo ratings yet
- 6016 ManualDocument9 pages6016 ManualDoceigenNo ratings yet
- High Availability MySQL Database Replication With Solaris Zone ClusterDocument26 pagesHigh Availability MySQL Database Replication With Solaris Zone ClustertzakitsanNo ratings yet
- Wireless Room Freshener Spraying Robot With Video VisionDocument5 pagesWireless Room Freshener Spraying Robot With Video Visionsai thesisNo ratings yet
- Dektec DTU 215Document5 pagesDektec DTU 215Alexander WieseNo ratings yet
- PT4200 Service ManualDocument28 pagesPT4200 Service ManualaranivarNo ratings yet
- RK3399 EVB User Guide: Release Version: V1.0 Release Date: Aug 22, 2016Document35 pagesRK3399 EVB User Guide: Release Version: V1.0 Release Date: Aug 22, 2016NarendranVenkatramaniNo ratings yet
- WATER FILL UP Procedure - Rev.01Document6 pagesWATER FILL UP Procedure - Rev.01shivanshsovNo ratings yet
- The Nature of MaterialsDocument11 pagesThe Nature of MaterialscdymlkNo ratings yet
- VQ37HR Oil Consumption TSB - Nissan 370zDocument8 pagesVQ37HR Oil Consumption TSB - Nissan 370zcheshirecat79No ratings yet
- Class II Oral QuestionsDocument18 pagesClass II Oral QuestionsStewardGriffindorNo ratings yet
- Coolant Contains Oil: TroubleshootingDocument2 pagesCoolant Contains Oil: TroubleshootingPutra JawaNo ratings yet
- Bikas 2015Document17 pagesBikas 2015Clint TcNo ratings yet
- Genesis 30uvDocument42 pagesGenesis 30uvCARLOSNo ratings yet
- LateriteDocument16 pagesLateritenamitexNo ratings yet
- Corrosion Magazine Issue117 LowresDocument36 pagesCorrosion Magazine Issue117 Lowressaminasritn100% (2)
- CV ReinaldoZerpa+PEOPDocument2 pagesCV ReinaldoZerpa+PEOPReinaldo Zerpa PeñaNo ratings yet
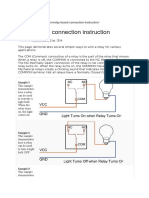
- Relay Board Connection InstructionDocument6 pagesRelay Board Connection Instructionkum512No ratings yet
- Requirements For Occupation Certificates For New BuildingsDocument1 pageRequirements For Occupation Certificates For New BuildingsBernard MusonaNo ratings yet
- SCAK200 - AK300 BookDocument28 pagesSCAK200 - AK300 BookStavre SorinNo ratings yet
- 19-GB 50030-91氧气站设计规范en PDFDocument34 pages19-GB 50030-91氧气站设计规范en PDFyyyy071220No ratings yet
- Skyblivion Architecture GuidelinesDocument11 pagesSkyblivion Architecture GuidelinesBrody EvensonNo ratings yet
- CV Engr. Md. HasmotuzzamanDocument7 pagesCV Engr. Md. HasmotuzzamanEngr SwapanNo ratings yet
- BIAS Amp Product ChartDocument4 pagesBIAS Amp Product ChartMarco ZamoranoNo ratings yet
- Design Planning Records Center of The Future 2004-10Document29 pagesDesign Planning Records Center of The Future 2004-10Talam KeladiNo ratings yet
- CL 6 NSTSE-2021-Paper 464Document18 pagesCL 6 NSTSE-2021-Paper 464PrajNo ratings yet
- PresentfinalDocument14 pagesPresentfinalAkashNo ratings yet
- Coalbrookdale Darby Stove (Boiler Model) : Spare Parts ManualDocument7 pagesCoalbrookdale Darby Stove (Boiler Model) : Spare Parts ManualDavid Mark JonesNo ratings yet
- CHAPTER 8: Checkboxes and Radio Buttons: ObjectivesDocument7 pagesCHAPTER 8: Checkboxes and Radio Buttons: Objectivesjerico gaspanNo ratings yet
- RTD SpecificationsDocument3 pagesRTD SpecificationsmhatresameerNo ratings yet