Download as docx, pdf, or txt
You might also like
- Unit8-Induction MotorDocument40 pagesUnit8-Induction MotorsaravananNo ratings yet
- PowerMac G5 Developer NoteDocument94 pagesPowerMac G5 Developer NotesobarNo ratings yet
- Wheeled Coach2Document2 pagesWheeled Coach2Rachelle Lim-Magtanggol67% (3)
- Single Phase Induction MotorDocument22 pagesSingle Phase Induction MotorMubashshir AminNo ratings yet
- Unit-5 Fractional H P MotorDocument39 pagesUnit-5 Fractional H P Motor0004Prathamesh TayadeNo ratings yet
- Single Phase IMDocument36 pagesSingle Phase IMHassan SNo ratings yet
- Unit 2 Single Phase Induction Motor - Watermark PDFDocument21 pagesUnit 2 Single Phase Induction Motor - Watermark PDFPalak Jio100% (1)
- Module 4 3Document24 pagesModule 4 3Atharva KhadseNo ratings yet
- AC MachinesDocument22 pagesAC MachinesUtkarsh ShuklaNo ratings yet
- Unit 3Document19 pagesUnit 3Monika GNo ratings yet
- EE6504-Electrical Machines - II-1330526698-Em II Unit 5Document30 pagesEE6504-Electrical Machines - II-1330526698-Em II Unit 5AnkurNo ratings yet
- Free-Samples Amie Chapters Single Phase Induction MotorsDocument19 pagesFree-Samples Amie Chapters Single Phase Induction MotorsStitch BeatzNo ratings yet
- Single Phase Induction MotorsDocument18 pagesSingle Phase Induction MotorsAMIE Study Circle, RoorkeeNo ratings yet
- Single Phase Induction MotorDocument2 pagesSingle Phase Induction Motorjay shahNo ratings yet
- 1 Phase Induction MotorDocument2 pages1 Phase Induction Motorjay shahNo ratings yet
- 1L Single - Phase IMDocument17 pages1L Single - Phase IMAli AltahirNo ratings yet
- Induction Motor and Hydropower PlantDocument24 pagesInduction Motor and Hydropower PlantYugalal GurungNo ratings yet
- EDCA Module 5Document16 pagesEDCA Module 5Sh PNo ratings yet
- EE 6504 Electrical Machines-II Mrs.P.Priyadharshini, AP/RMDEEEDocument37 pagesEE 6504 Electrical Machines-II Mrs.P.Priyadharshini, AP/RMDEEEAhmad JmaliaNo ratings yet
- 1 Single-Phase Motor 2020Document22 pages1 Single-Phase Motor 2020SerajNo ratings yet
- Electrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4Document250 pagesElectrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4sanjoni.jainNo ratings yet
- ELE290 Chapter 6Document21 pagesELE290 Chapter 6imfendiNo ratings yet
- Induction MotorDocument31 pagesInduction MotorAvijitNo ratings yet
- (Single+Three) Phase Induction Motors Interview Questions SetDocument18 pages(Single+Three) Phase Induction Motors Interview Questions SetrajshahieeeNo ratings yet
- Single Phase Induction Motor Cross-Field TheoryDocument15 pagesSingle Phase Induction Motor Cross-Field TheoryShoaib Khan100% (1)
- #5 Module 5Document52 pages#5 Module 5anishdeshmukh108No ratings yet
- CHAPTER 8 Induction MotorDocument3 pagesCHAPTER 8 Induction MotorDhanashree ParanjapeNo ratings yet
- Unit 1 Co1Document31 pagesUnit 1 Co1Gokul anandNo ratings yet
- Split Phase Induction Motor: Run Start TDocument4 pagesSplit Phase Induction Motor: Run Start TnikunjNo ratings yet
- Reluctance MotorDocument14 pagesReluctance Motortheodorakis017781No ratings yet
- EES (Lec20)Document16 pagesEES (Lec20)Muhammad SagheerNo ratings yet
- EM-II Unit 6 FinalDocument16 pagesEM-II Unit 6 FinalNaresh GollapalliNo ratings yet
- Single Phase Induction Motor and Stepper MotorDocument11 pagesSingle Phase Induction Motor and Stepper MotorManthan deshmukhNo ratings yet
- AC Machine FundamentalsDocument24 pagesAC Machine FundamentalsKimsairng CheaNo ratings yet
- Induction MotorDocument43 pagesInduction MotorJanine Jade SetiasNo ratings yet
- Unit - 3 Electrical Machines: 1. Generation of Rotating Magnetic FieldDocument10 pagesUnit - 3 Electrical Machines: 1. Generation of Rotating Magnetic FieldAtharv BhedaNo ratings yet
- Em Ii PDFDocument76 pagesEm Ii PDFRavi SharmaNo ratings yet
- 74f60006-5f8d-4d61-ab7c-37507d25771aDocument101 pages74f60006-5f8d-4d61-ab7c-37507d25771aChandu NayakNo ratings yet
- Single Phase Induction MotorsDocument11 pagesSingle Phase Induction MotorsSafnas KariapperNo ratings yet
- 1 Electric Motor BasicsDocument13 pages1 Electric Motor BasicsPandaGendutNo ratings yet
- Split Phase Induction Motor: Single Phase Induction Motors Single Phase Induction MotorsDocument5 pagesSplit Phase Induction Motor: Single Phase Induction Motors Single Phase Induction MotorsTanveer HajanoNo ratings yet
- Unit IIDocument194 pagesUnit IIMuniyasamyNo ratings yet
- Three Phase Induction MotorDocument16 pagesThree Phase Induction MotorPushan Kumar DattaNo ratings yet
- AC Asinhron MotorDocument54 pagesAC Asinhron MotorSmai HondoNo ratings yet
- Auto Transformer StarterDocument46 pagesAuto Transformer StarterSarthak MishraNo ratings yet
- Single Phase MotorDocument32 pagesSingle Phase MotorsnzaimahNo ratings yet
- Types of AlternatorsDocument12 pagesTypes of AlternatorsHamoudRazaMazherNo ratings yet
- Unit 3 Three Phase Alternator PDFDocument38 pagesUnit 3 Three Phase Alternator PDFPalak JioNo ratings yet
- AfaffagDocument33 pagesAfaffagDousik ManokaranNo ratings yet
- Unit-V: Synchronous Generators and Synchronous MotorsDocument9 pagesUnit-V: Synchronous Generators and Synchronous MotorsPasupuleti Venkata RamanaNo ratings yet
- Induction Motor - Double Field Revolving Theory - Universal MotorDocument24 pagesInduction Motor - Double Field Revolving Theory - Universal MotorSree ShobhaNo ratings yet
- Chapter 10 Single Phase Motors EE 342Document21 pagesChapter 10 Single Phase Motors EE 342Ali AhmadNo ratings yet
- AC Synchronous GeneratorDocument8 pagesAC Synchronous Generatoraswardi8756No ratings yet
- UNIT 5 - Special MachinesDocument33 pagesUNIT 5 - Special MachinesKapilachander ThangavelNo ratings yet
- Fractional Kilowatt MotorsDocument37 pagesFractional Kilowatt MotorsPavan Kumar100% (1)
- EEC Unit VDocument10 pagesEEC Unit VTushar ShindeNo ratings yet
- 3.18 Ac MotorsDocument25 pages3.18 Ac Motorsdeleted Yt acc.No ratings yet
- Module 5 Notes MTRDocument14 pagesModule 5 Notes MTRAbhijith JoseNo ratings yet
- Assignment 2Document10 pagesAssignment 2NajamNo ratings yet
- 7 Single Phase IMDocument45 pages7 Single Phase IMlupillorivera9981No ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Encoders AcessóriosDocument26 pagesEncoders AcessóriosCharles Claudino SilvaNo ratings yet
- TI50A01A20-01EN Fast ToolsDocument162 pagesTI50A01A20-01EN Fast Toolstimsar1357No ratings yet
- PMP Shortnotes For ExamDocument2 pagesPMP Shortnotes For Examatulw100% (1)
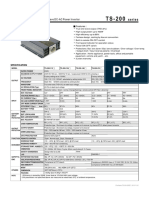
- TS 200Document2 pagesTS 200Kmila ClavijoNo ratings yet
- Oracle Integration Pack For Peoplesoft General Ledger 2.5 - Implementation GuideDocument142 pagesOracle Integration Pack For Peoplesoft General Ledger 2.5 - Implementation GuidesandeeptcsNo ratings yet
- Ceit-Department Subject OfferingDocument105 pagesCeit-Department Subject OfferingKristian FernandezNo ratings yet
- E Swimming Pool HandbookDocument17 pagesE Swimming Pool HandbookEdwin GeeqNo ratings yet
- 8050SDocument4 pages8050Sscr8510No ratings yet
- Installation InstructionsDocument5 pagesInstallation InstructionsmarranNo ratings yet
- Datamax Iclass Operators Manual h2Document146 pagesDatamax Iclass Operators Manual h2c150199No ratings yet
- Smartcool Energy Saving UK Technology PresentationDocument40 pagesSmartcool Energy Saving UK Technology PresentationSaleem AhmedNo ratings yet
- Torso Bolting ToolsDocument15 pagesTorso Bolting ToolsDhanny MiharjaNo ratings yet
- Sdarticle 30Document165 pagesSdarticle 30Corina EsanuNo ratings yet
- LG Pompe CalduraDocument15 pagesLG Pompe CalduraRENSO BirouClujNo ratings yet
- Willy Resume-July .2016Document13 pagesWilly Resume-July .2016LPG Equipment Consulting and ServicesNo ratings yet
- H53015302 TRQ XXXDocument2 pagesH53015302 TRQ XXXTuTuy AnNo ratings yet
- Estimate Seepage Losses in Irrigation Canal SystemDocument4 pagesEstimate Seepage Losses in Irrigation Canal SystemLuis AzulaNo ratings yet
- $TMP MAN 1263 001 00Document66 pages$TMP MAN 1263 001 00Ricardo AzevedoNo ratings yet
- Anti Collision SystemDocument2 pagesAnti Collision SystemquoazNo ratings yet
- Engineering ch2Document26 pagesEngineering ch2api-3173444260% (2)
- Rainbow Technology ReportDocument30 pagesRainbow Technology ReportVikas Aswal50% (4)
- Paper Title: Preparations of Papers For The Journals of The MECS PublisherDocument4 pagesPaper Title: Preparations of Papers For The Journals of The MECS PublisherIzul' FerryNo ratings yet
- Deloitte Digital - Front-End DeveloperDocument3 pagesDeloitte Digital - Front-End DeveloperLolNo ratings yet
- Caffenol C Citric Hydrogen Peroxide April2014Document6 pagesCaffenol C Citric Hydrogen Peroxide April2014Iva BožićNo ratings yet
- Nivel Liquido Dodge 62teDocument4 pagesNivel Liquido Dodge 62teMario Do' HirchsNo ratings yet
- Vane Motors - 21,6 To 37,5 CM /R (1.32 To 2.29 in /R) : Characteristics EfficiencyDocument7 pagesVane Motors - 21,6 To 37,5 CM /R (1.32 To 2.29 in /R) : Characteristics EfficiencysyediliyassikandarNo ratings yet
- 411 - 66000e MLT Ring Torque Book Fourth Edition Oct 06Document62 pages411 - 66000e MLT Ring Torque Book Fourth Edition Oct 06angelogobin100% (1)
- Chapter 14 RevisedDocument18 pagesChapter 14 RevisedLim Cia ChienNo ratings yet