Download as pdf or txt
You might also like
- Administrators GuideDocument1,248 pagesAdministrators GuideInfomedia supportNo ratings yet
- LdoDocument17 pagesLdoKAMARUDHEEN KPNo ratings yet
- Types Pyts & Pytc Switched Distance RelaysDocument14 pagesTypes Pyts & Pytc Switched Distance Relayssgshekar30100% (1)
- kw18 Smart Watch User Manual PDFDocument15 pageskw18 Smart Watch User Manual PDFHaryana harunNo ratings yet
- The ANSI/IEEE Code For Phase Sequence Relay Is 47 and of Phase Failure Relay Is 58Document9 pagesThe ANSI/IEEE Code For Phase Sequence Relay Is 47 and of Phase Failure Relay Is 58ax33m144No ratings yet
- Intersil - Selecting-A-Pwm-Controller For Narrow On Time Buck ConversionDocument7 pagesIntersil - Selecting-A-Pwm-Controller For Narrow On Time Buck ConversionIvana PrezimeNo ratings yet
- AN636 Maxim ReversecurrentDocument6 pagesAN636 Maxim ReversecurrentShannon ShanNo ratings yet
- Application Note 69 September 1996 Lt1575 Ultrafast Linear Controller Makes Fast Transient Response Power SuppliesDocument12 pagesApplication Note 69 September 1996 Lt1575 Ultrafast Linear Controller Makes Fast Transient Response Power SuppliesHahdNo ratings yet
- Voltage and Current TransformersDocument27 pagesVoltage and Current TransformersRebekah Powell100% (1)
- Exp.6 Double BusbarDocument11 pagesExp.6 Double BusbarMohammed Abu Al HaijaNo ratings yet
- Frequency RelayDocument9 pagesFrequency RelayLanya AramNo ratings yet
- High Resistance GroundingDocument6 pagesHigh Resistance GroundingpecampbeNo ratings yet
- A Buck-or-Boost Converter Module With Embedded Inductor and Fast Current LimitDocument10 pagesA Buck-or-Boost Converter Module With Embedded Inductor and Fast Current LimitVeeraiah BodduNo ratings yet
- AEK CIRED PreprintDocument5 pagesAEK CIRED Preprintbisas_rishiNo ratings yet
- Load Switch Basics: AbstractDocument4 pagesLoad Switch Basics: AbstractAndi KaNo ratings yet
- Application Note Gan Power Amplifier Pulsed Operation Best PracticesDocument5 pagesApplication Note Gan Power Amplifier Pulsed Operation Best PracticesPeter MalamaNo ratings yet
- Load Tap Changing Control - BeckwithDocument9 pagesLoad Tap Changing Control - BeckwithTarcisio FlávioNo ratings yet
- Voltage Clamp CircuitsDocument6 pagesVoltage Clamp Circuitswww.vyeko_.bloger.hrNo ratings yet
- An-978 HV Floating MOS Gate DriversDocument21 pagesAn-978 HV Floating MOS Gate DriversPeter RueNo ratings yet
- Diffrent Types of UPSDocument9 pagesDiffrent Types of UPSAsher KhanNo ratings yet
- Using The MOSFET As A SwitchDocument4 pagesUsing The MOSFET As A Switchadrian665100% (2)
- Mosfet As A SwitchDocument7 pagesMosfet As A SwitchAshiq HussainNo ratings yet
- Design of Automatic Phase Selector From Any Available Three Phase With The Use of Logic Gate and Relay DriverDocument18 pagesDesign of Automatic Phase Selector From Any Available Three Phase With The Use of Logic Gate and Relay DriverVivek Kumar SinghNo ratings yet
- Electrical Basic Questions and Answers Reg Power PlantsDocument4 pagesElectrical Basic Questions and Answers Reg Power PlantsRsuneel100% (1)
- Why Is Continuous On-Line Monitoring of Partial Discharge in The Switchgear Necessary?Document17 pagesWhy Is Continuous On-Line Monitoring of Partial Discharge in The Switchgear Necessary?sunny1725No ratings yet
- Full On-Chip CMOS Low-Dropout Voltage RegulatorDocument12 pagesFull On-Chip CMOS Low-Dropout Voltage RegulatorashishmanyanNo ratings yet
- RS 485 ConsiderationsDocument5 pagesRS 485 ConsiderationsgeorwashNo ratings yet
- REN Automotive-Pol-Regulator-Requirements WHP 20180814Document6 pagesREN Automotive-Pol-Regulator-Requirements WHP 20180814Bilal Nuraldin EltayebNo ratings yet
- Power Supply ReviewDocument4 pagesPower Supply Reviewramesh ranjitNo ratings yet
- IOPDocument22 pagesIOPAdrian ZeetwoNo ratings yet
- SW - Buck - 1 Application Report: Topology: Non Synchronous Buck Converter Controller: Texas Instruments TPS40200Document25 pagesSW - Buck - 1 Application Report: Topology: Non Synchronous Buck Converter Controller: Texas Instruments TPS40200Ion AvramNo ratings yet
- Com Par at orDocument7 pagesCom Par at orసదాశివ మద్దిగిరిNo ratings yet
- PWMDocument16 pagesPWMRICHIHOTS2100% (2)
- Introduction To Power Systems: 1.1: A.C Transmission SystemDocument23 pagesIntroduction To Power Systems: 1.1: A.C Transmission Systemkar1740No ratings yet
- How To Buffer An Op-Amp Output For Higher Current Part 1Document8 pagesHow To Buffer An Op-Amp Output For Higher Current Part 1adalberto soplatetasNo ratings yet
- System Neutral Resistance GroundingDocument7 pagesSystem Neutral Resistance GroundingadhyarthaNo ratings yet
- Solid State Circuit Breaker PDFDocument7 pagesSolid State Circuit Breaker PDFifmatosNo ratings yet
- EnphaseTechBrief Vdrop M250Document12 pagesEnphaseTechBrief Vdrop M250Lia SantosNo ratings yet
- Float DriveDocument24 pagesFloat DriveEdy AchalmaNo ratings yet
- 78S40Document0 pages78S40Pravin MevadaNo ratings yet
- Voltage RegulatorDocument11 pagesVoltage Regulatorfatank04100% (1)
- Capless LDO DESIGNDocument6 pagesCapless LDO DESIGNbhasin_hemantNo ratings yet
- OptoModules SolidStateRelaysDocument44 pagesOptoModules SolidStateRelaysalltheloveintheworldNo ratings yet
- White Paper 2009 System Neutral Resistance Grounding LBDocument7 pagesWhite Paper 2009 System Neutral Resistance Grounding LBLong LeoNo ratings yet
- Simple Circuit Design Tutorial For PoE ApplicationsDocument10 pagesSimple Circuit Design Tutorial For PoE ApplicationsTayyeb AliNo ratings yet
- Protection Relay SettingsDocument3 pagesProtection Relay SettingssmsbondNo ratings yet
- Capacitance Adapter For Multimeter: (Document Subtitle)Document11 pagesCapacitance Adapter For Multimeter: (Document Subtitle)Kashif Hassan100% (1)
- OLD OHD: FIGURE 1. Termination SchemesDocument5 pagesOLD OHD: FIGURE 1. Termination SchemesAnmolNo ratings yet
- PirDocument31 pagesPirdilipelineNo ratings yet
- Grounding at Points Other Than System NeutralDocument15 pagesGrounding at Points Other Than System NeutralWendy DuncanNo ratings yet
- Current-Sharing in Power Expansion ArraysDocument5 pagesCurrent-Sharing in Power Expansion ArrayshexbiNo ratings yet
- Low Power Battery DesignDocument8 pagesLow Power Battery DesignAmmulu KondaNo ratings yet
- 50W Forward Converter With Synchronous Rectification and Secondary Side Control PDFDocument30 pages50W Forward Converter With Synchronous Rectification and Secondary Side Control PDF양영주No ratings yet
- Solid State Tap Changer PresentationDocument17 pagesSolid State Tap Changer PresentationSujit GangurdeNo ratings yet
- Phase Shifting TransformersDocument6 pagesPhase Shifting TransformersWaldemar ZiomekNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
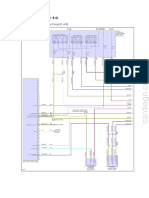
- 6.4L, Engine Performance CircuitDocument6 pages6.4L, Engine Performance CircuitAliNo ratings yet
- WP2017 O-2-2-4 GDPR MobileDocument70 pagesWP2017 O-2-2-4 GDPR MobileVasunNo ratings yet
- Dai2012 WCNDocument24 pagesDai2012 WCNSusan AliceNo ratings yet
- Seminar Report On Mobile Adhoc NetworksDocument16 pagesSeminar Report On Mobile Adhoc NetworksAamir Shah100% (1)
- Reference Guide: Sabre BasicDocument22 pagesReference Guide: Sabre BasicSushila Ghimire100% (2)
- The Valve Wizard Equinox Reverb PDFDocument2 pagesThe Valve Wizard Equinox Reverb PDFRobert GabrielNo ratings yet
- 2b3 SmartUP Parts Manual, 24472102 Rev.B Mar.2013Document42 pages2b3 SmartUP Parts Manual, 24472102 Rev.B Mar.2013Izabela SantanaNo ratings yet
- Dsme Act IbDocument1 pageDsme Act IbsililloNo ratings yet
- A Conversation With Alan Cooper: The Origin of Interaction DesignDocument3 pagesA Conversation With Alan Cooper: The Origin of Interaction DesignCjay ChangNo ratings yet
- SOP Long Packing Slip FormDocument2 pagesSOP Long Packing Slip FormHELIX2009No ratings yet
- Brief CV For LL.BDocument2 pagesBrief CV For LL.BNilang RaiNo ratings yet
- Keywords: Information Systems, Off Work, Agile, ScrumDocument10 pagesKeywords: Information Systems, Off Work, Agile, ScrumDiana DewiNo ratings yet
- Top Five Ways To Find A SAP Table and Field Within A TransactionDocument14 pagesTop Five Ways To Find A SAP Table and Field Within A Transactionedmondo77No ratings yet
- GATEWAY To SOUTH-bus Terminus at KilambakkamDocument5 pagesGATEWAY To SOUTH-bus Terminus at KilambakkamAmar NeethiNo ratings yet
- Guidelines For Mapua Shs To Ug EnrollmentDocument3 pagesGuidelines For Mapua Shs To Ug EnrollmentNathaniel PascualNo ratings yet
- Fire Classif & ChecklistDocument8 pagesFire Classif & ChecklistAtulNo ratings yet
- WXN Xxxx+Timecard+Tls+2013!02!23 1Document5 pagesWXN Xxxx+Timecard+Tls+2013!02!23 1nate_morris_weaxonNo ratings yet
- Dell Precision t5500 InstructionsDocument80 pagesDell Precision t5500 InstructionsNikola PetrovNo ratings yet
- Swarrnim Institute of Technology: University Exam Time Table (Regular/Remedial) (Summer 2022)Document1 pageSwarrnim Institute of Technology: University Exam Time Table (Regular/Remedial) (Summer 2022)Nayan B. PatelNo ratings yet
- Btech Cse 6 Sem Compiler Design Pcs6i102 2019Document2 pagesBtech Cse 6 Sem Compiler Design Pcs6i102 2019bipulswain365No ratings yet
- Ausa Mixers 500RX-X1100RH-ENG PDFDocument2 pagesAusa Mixers 500RX-X1100RH-ENG PDFAsad AijazNo ratings yet
- ReadmeDocument2 pagesReadmeAjit RamNo ratings yet
- Big Data Balamurugan Balusamy Full ChapterDocument67 pagesBig Data Balamurugan Balusamy Full Chapterjerry.buttrey648100% (6)
- Jet EngineDocument43 pagesJet EnginefadyNo ratings yet
- QuickStart VM Cloudera InstallationDocument14 pagesQuickStart VM Cloudera InstallationSumiNo ratings yet
- TUP ApplicationFormDocument2 pagesTUP ApplicationFormSherwin Cuento100% (6)
- Implement Complex Migrations in Java: Jdbcmigration V - Description - JavaDocument3 pagesImplement Complex Migrations in Java: Jdbcmigration V - Description - JavaAdolfNo ratings yet
- The Ultimate Wholesalers GuideDocument24 pagesThe Ultimate Wholesalers GuideAnonymous AjQ7qhN100% (1)