Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- TarikDocument33 pagesTarikRy-zal channel100% (1)
- Foucault's PendulumDocument4 pagesFoucault's PendulumCristina AlexandraNo ratings yet
- EnjoyPrintable Sold2Document24 pagesEnjoyPrintable Sold2Dragan StanicNo ratings yet
- Nec Poe Box 60WDocument1 pageNec Poe Box 60WDragan StanicNo ratings yet
- Optimized Fractional-N PLL For FMCW Radar Indoor Positioning ApplicationsDocument4 pagesOptimized Fractional-N PLL For FMCW Radar Indoor Positioning ApplicationsDragan StanicNo ratings yet
- Modeling of Range Accuracy For A Radar SystemDocument4 pagesModeling of Range Accuracy For A Radar SystemDragan StanicNo ratings yet
- EnjoyPrintable Sold3Document24 pagesEnjoyPrintable Sold3Dragan StanicNo ratings yet
- Verso - Wiring Diagram VSS1 - LHD - EWD - PZ464-T0131-00 Rev 04Document1 pageVerso - Wiring Diagram VSS1 - LHD - EWD - PZ464-T0131-00 Rev 04Dragan Stanic100% (1)
- Poslovna Funkcija Organizacione CelineDocument2 pagesPoslovna Funkcija Organizacione CelineDragan StanicNo ratings yet
- HTTP Community - ComsocDocument12 pagesHTTP Community - ComsocDragan StanicNo ratings yet
- Word Excel Power Point Access FrontpageDocument36 pagesWord Excel Power Point Access FrontpageDragan StanicNo ratings yet
- Nec 18GHZDocument26 pagesNec 18GHZDragan StanicNo ratings yet
- NEC 7GHzDocument40 pagesNEC 7GHzDragan StanicNo ratings yet
- Astra H - X1 ConnectorDocument4 pagesAstra H - X1 ConnectorDragan StanicNo ratings yet
- E Commerce TutorialDocument34 pagesE Commerce TutorialDragan StanicNo ratings yet
- Serbian Wine Routes 2009Document64 pagesSerbian Wine Routes 2009zoruska100% (1)
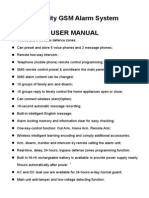
- GSM ALARMDocument17 pagesGSM ALARMDragan StanicNo ratings yet
- S206 Alarm System ManualDocument16 pagesS206 Alarm System ManualDragan StanicNo ratings yet
- Assignment On Electromagnetic WavesDocument5 pagesAssignment On Electromagnetic WavesAtharav GoyalNo ratings yet
- Problem Sheet 2 Use of Differential Analysis ApproachDocument2 pagesProblem Sheet 2 Use of Differential Analysis Approachhafiz mudasirNo ratings yet
- Lagrange PointsDocument4 pagesLagrange Pointsjas dwanNo ratings yet
- Cantilever Wall Analysis Input DataDocument15 pagesCantilever Wall Analysis Input DataSaša MarinNo ratings yet
- Introduction To Finite Element MethodDocument202 pagesIntroduction To Finite Element MethodPrithviraj Daga80% (15)
- Mössbauer Study of H HPF SN in The Heusler Alloy Co 2 MNSN Under PressureDocument4 pagesMössbauer Study of H HPF SN in The Heusler Alloy Co 2 MNSN Under PressureΙήήΘςέήτ βόγNo ratings yet
- Fundamental of ExtrusionDocument28 pagesFundamental of Extrusion6014649No ratings yet
- Experience and Practical Considerations in The Design of Viscous DampersDocument9 pagesExperience and Practical Considerations in The Design of Viscous DampersHiep Truong TuanNo ratings yet
- Boat & Stream Written Lecture Sheet PDFDocument2 pagesBoat & Stream Written Lecture Sheet PDFMirajulIslamNo ratings yet
- Differential Pressure TransmittersDocument10 pagesDifferential Pressure TransmittersClyde P. LumongsodNo ratings yet
- CE 301 Assignment Review PDFDocument40 pagesCE 301 Assignment Review PDFSorin ParaschivNo ratings yet
- JEE Main 2021 - Kinematics of A Particle - SolutionsDocument4 pagesJEE Main 2021 - Kinematics of A Particle - SolutionsSuraj KumarNo ratings yet
- CompressabilityDocument12 pagesCompressabilityAlameen GandelaNo ratings yet
- Terzaghi's Bearing Capacity TheoryDocument9 pagesTerzaghi's Bearing Capacity TheoryBe civil Sixth batchNo ratings yet
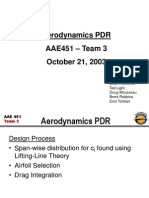
- Lifting Line TheoryDocument19 pagesLifting Line TheorymgskumarNo ratings yet
- Handbook of Ocean Wave EnergyDocument305 pagesHandbook of Ocean Wave Energyalfonso lopez alquisirezNo ratings yet
- Uts KF 1Document2 pagesUts KF 1imania shaumiNo ratings yet
- Annezasofia - Asg Chap 3Document12 pagesAnnezasofia - Asg Chap 3anneza sofiaNo ratings yet
- Relativistic Collisions: P442 - Analytical Mechanics - IIDocument7 pagesRelativistic Collisions: P442 - Analytical Mechanics - IIMayank TiwariNo ratings yet
- Newton's Laws PracticeDocument5 pagesNewton's Laws PracticeGiaNo ratings yet
- Adaptive PID Control of A Stepper Motor Driving A Exible RotorDocument10 pagesAdaptive PID Control of A Stepper Motor Driving A Exible RotorMohamed NabilNo ratings yet
- Centre of PercussionDocument5 pagesCentre of Percussionvijay2293No ratings yet
- Analysis of The Double-Tunnels Interaction by Using Finite Element-CompressedDocument13 pagesAnalysis of The Double-Tunnels Interaction by Using Finite Element-CompressedprioNo ratings yet
- Ship Loads and StressesDocument16 pagesShip Loads and StressesTahresNo ratings yet
- Excited States and Photochemistry of Organic Molecules Klessinger M Michl J VCH 1995Document281 pagesExcited States and Photochemistry of Organic Molecules Klessinger M Michl J VCH 1995Semanu TcheyiNo ratings yet
- Episode VI Shear Force & Bending Moment (Concentrated Load)Document22 pagesEpisode VI Shear Force & Bending Moment (Concentrated Load)HasmitthaNo ratings yet
- Additional Practice Questions - Force MethodDocument9 pagesAdditional Practice Questions - Force MethodXiuming ChenNo ratings yet