Download as pdf or txt
You might also like
- Nachi - FD11 CONTROLLER INSTRUCTION MANUALDocument316 pagesNachi - FD11 CONTROLLER INSTRUCTION MANUALJesseNo ratings yet
- FD Controller Instruction Manual Command Reference: 4th EditionDocument124 pagesFD Controller Instruction Manual Command Reference: 4th EditionAndrea DoriaNo ratings yet
- TFDEN-175-003 OpenNR IFDocument290 pagesTFDEN-175-003 OpenNR IFRega PrimastaNo ratings yet
- Manipulador NachiDocument28 pagesManipulador NachiAnonymous t7eZljNo ratings yet
- Tcfen-154-001 CFD Startup PDFDocument88 pagesTcfen-154-001 CFD Startup PDFPhasin Chitutsaha100% (1)
- AF-4001 AFA-4001 AFT-4201 AFU-4201 Instruction ManualDocument36 pagesAF-4001 AFA-4001 AFT-4201 AFU-4201 Instruction ManualsunhuynhNo ratings yet
- Fanuc-Ipendant PDFDocument2 pagesFanuc-Ipendant PDFantoineNo ratings yet
- PGDIT 101 Introduction To IT and Programming - Lecture 1 Program & Programming LanguagesDocument12 pagesPGDIT 101 Introduction To IT and Programming - Lecture 1 Program & Programming LanguagesAnwarHossainSaikatNo ratings yet
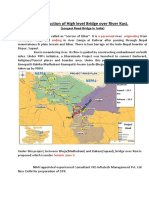
- Bharatmala Package-IVDocument16 pagesBharatmala Package-IVSK SwainNo ratings yet
- IRC5 Basic Operations Student Manual Rev3 SlideshowDocument105 pagesIRC5 Basic Operations Student Manual Rev3 Slideshowhisham_eyesNo ratings yet
- 1L22440 e 7 PDFDocument94 pages1L22440 e 7 PDFTonluck KaimakNo ratings yet
- Nx-100 Operator's Manual (For General Purpose)Document410 pagesNx-100 Operator's Manual (For General Purpose)hasteriaNo ratings yet
- FD Controller Instruction Manual Palletize Function: 5th EditionDocument112 pagesFD Controller Instruction Manual Palletize Function: 5th EditionrmlNo ratings yet
- AXstandardRev7+SafetyRev4 CombinedDocument125 pagesAXstandardRev7+SafetyRev4 CombinedJose Ernesto AcevedoNo ratings yet
- IRB-660 - Instruction Manual - ENG - Version PDFDocument15 pagesIRB-660 - Instruction Manual - ENG - Version PDFViaDwiMiftakhur100% (1)
- Manual de Aplicação EtherNet-IP Master-Slave RW 5.15Document80 pagesManual de Aplicação EtherNet-IP Master-Slave RW 5.15Diogo CampezattoNo ratings yet
- SIMATIC S7-1200 - Sinamics Blocks TIA PortalDocument91 pagesSIMATIC S7-1200 - Sinamics Blocks TIA Portalantonio pedroNo ratings yet
- FD/CFD Controller Instruction Manual Software PLC: 5th EditionDocument150 pagesFD/CFD Controller Instruction Manual Software PLC: 5th EditionrmlNo ratings yet
- Rcon (Me0384 5B)Document844 pagesRcon (Me0384 5B)Anh TaiNo ratings yet
- Program Editor User ManualDocument14 pagesProgram Editor User ManualXanti Zabala Da RosaNo ratings yet
- Pluto Safety Progarmming Manual ADocument102 pagesPluto Safety Progarmming Manual ATetsusaigaNo ratings yet
- SFDEN 006 008 - FD11controller PDFDocument22 pagesSFDEN 006 008 - FD11controller PDFkhophimhdNo ratings yet
- Reis BackupDocument28 pagesReis BackupRaghu VutukuruNo ratings yet
- FATEC Mitsubishi QD77 PositiotingDocument342 pagesFATEC Mitsubishi QD77 PositiotingMichealNo ratings yet
- EZio DLL UM ENDocument56 pagesEZio DLL UM ENCyborg TecNo ratings yet
- Latest Revision: Title Page Location: Plant: + + Sublocation: CAB Status: ApprovedDocument50 pagesLatest Revision: Title Page Location: Plant: + + Sublocation: CAB Status: Approvedignacio lopezNo ratings yet
- Wire SenseDocument88 pagesWire SenseMurat ToprakNo ratings yet
- IRC5-IRB6600 Prod Man 3HAC020938-001 References RevC enDocument82 pagesIRC5-IRB6600 Prod Man 3HAC020938-001 References RevC enmartinimartiiniNo ratings yet
- AR4 Robot Manul V1.5 PDFDocument292 pagesAR4 Robot Manul V1.5 PDFEusebio RivasNo ratings yet
- Usability Aspects On Industrial ABB Robot Calibration With A Focus On TCP and Work Object CalibrationDocument61 pagesUsability Aspects On Industrial ABB Robot Calibration With A Focus On TCP and Work Object Calibrationmalick_l_cNo ratings yet
- Devicenet Lean: Application ManualDocument108 pagesDevicenet Lean: Application ManualMiguel ReyesNo ratings yet
- Graphical Teach Pendant: - The FlexpendantDocument11 pagesGraphical Teach Pendant: - The FlexpendantAMINTA MANZANILLANo ratings yet
- iQF - Manual Training (Basic, GX Works3) PDFDocument292 pagesiQF - Manual Training (Basic, GX Works3) PDFVirendra ZopeNo ratings yet
- Rechargeable Battery UnitDocument24 pagesRechargeable Battery Unitprsking187No ratings yet
- MR J4 CatalogueDocument302 pagesMR J4 CatalogueGiang BùiNo ratings yet
- CNC4640 Operation ManualDocument103 pagesCNC4640 Operation ManualDiana ZapataNo ratings yet
- Fanuc PDF FilesDocument2 pagesFanuc PDF FilesMichaelNo ratings yet
- Mitsubishi Manual Fx5-40ssc AdvancedDocument598 pagesMitsubishi Manual Fx5-40ssc AdvancedPham LongNo ratings yet
- Hi 5 A 140901 OMEN1Document531 pagesHi 5 A 140901 OMEN1Joel MuñizNo ratings yet
- For Visual Studio User'S Manual: Motoplus SDKDocument85 pagesFor Visual Studio User'S Manual: Motoplus SDKMihail AvramovNo ratings yet
- 5320/5330/5340 IP Phones: SIP User and Administrator Release 8.0Document58 pages5320/5330/5340 IP Phones: SIP User and Administrator Release 8.0Stelios KoroneosNo ratings yet
- PLC Programming Techniques - Part 2Document27 pagesPLC Programming Techniques - Part 2Rafael Riesgo100% (1)
- Robotics & Automation: Battery Power Loss Recovery Method: Quick MasterDocument1 pageRobotics & Automation: Battery Power Loss Recovery Method: Quick MasterAdao_industecNo ratings yet
- ATTC Laser CatalogDocument74 pagesATTC Laser CatalogÖzgür AslanNo ratings yet
- MELSEC-Q QD77MS Simple Motion Module User's Manual (Positioning Control) PDFDocument1,062 pagesMELSEC-Q QD77MS Simple Motion Module User's Manual (Positioning Control) PDFDina Arta MeviaNo ratings yet
- Abb 02 RAPID Overview enDocument234 pagesAbb 02 RAPID Overview enxeratuleNo ratings yet
- 2D Robot Vision System Robot Connection Manual (FANUC Edition)Document17 pages2D Robot Vision System Robot Connection Manual (FANUC Edition)emmanuel baezNo ratings yet
- KRC4 X11 External CircuitDocument1 pageKRC4 X11 External CircuitHerick MoscardiniNo ratings yet
- Robodk For Fanuc RobotsDocument13 pagesRobodk For Fanuc RobotsMoundher BachirNo ratings yet
- Abb Irc5 Controller ManualDocument4 pagesAbb Irc5 Controller ManualEmile M. Al-Mayah0% (1)
- FD Controller Instruction Manual Basic Operations Manual: 6th EditionDocument276 pagesFD Controller Instruction Manual Basic Operations Manual: 6th EditionPhasin ChitutsahaNo ratings yet
- Manual Abb Irc5Document24 pagesManual Abb Irc5MIGUELNo ratings yet
- Simodrive PDFDocument399 pagesSimodrive PDFSohailNo ratings yet
- 03 - IRC5 Controller OverviewDocument32 pages03 - IRC5 Controller Overviewpratish jainNo ratings yet
- Application Manual: Servo Gun SetupDocument82 pagesApplication Manual: Servo Gun SetupLuis ClaudioNo ratings yet
- MZ07-02 Standard SpecificationsDocument18 pagesMZ07-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- MZ04 Standard SpecificationsDocument29 pagesMZ04 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- SC700 Standard SpecificationsDocument15 pagesSC700 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Smzen 114 003 - MZ01 01 CFDDocument20 pagesSmzen 114 003 - MZ01 01 CFDmfsNo ratings yet
- NRS EZ0302 StandardSpecificationDocument40 pagesNRS EZ0302 StandardSpecificationArifNo ratings yet
- EZ03-02 Standard SpecificationsDocument28 pagesEZ03-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Op Amps: Design, Application, and TroubleshootingFrom EverandOp Amps: Design, Application, and TroubleshootingRating: 5 out of 5 stars5/5 (2)
- Chemistry Questions Mole ConceptDocument15 pagesChemistry Questions Mole ConceptbhaijanNo ratings yet
- 1955 Lundstrom Intermaxillary Tooth Width Ratio and Tooth Alignment and OcclusionDocument29 pages1955 Lundstrom Intermaxillary Tooth Width Ratio and Tooth Alignment and OcclusionRockey ShrivastavaNo ratings yet
- Class III Stress Strain ProblemsDocument13 pagesClass III Stress Strain ProblemsMadhan kumarNo ratings yet
- HSFG Bolts British MetricDocument24 pagesHSFG Bolts British MetricAlastair BrownNo ratings yet
- HP:081281836224 Jual Burner FBRDocument5 pagesHP:081281836224 Jual Burner FBRHabibie BoilerNo ratings yet
- Dce 1Document21 pagesDce 1Jay MehtaNo ratings yet
- Procedural Vs ConceptualDocument22 pagesProcedural Vs ConceptualAini NadhirahNo ratings yet
- 3º Año Básico - Inglés - Worksheet 2 The Natural WorldDocument3 pages3º Año Básico - Inglés - Worksheet 2 The Natural WorldDaniela Carolina Argomedo MenesesNo ratings yet
- Licad4Acad - Plant3D - ManualDocument19 pagesLicad4Acad - Plant3D - ManualEdinson NavarroNo ratings yet
- The Manufacture of Nitric AcidDocument8 pagesThe Manufacture of Nitric AcidAnaFarida100% (1)
- Safety Data Sheet For OzoneDocument3 pagesSafety Data Sheet For OzoneJKP Gradska čistoća BeogradNo ratings yet
- Data Modeling and Databases: IDSC 3103Document24 pagesData Modeling and Databases: IDSC 3103yangmulaNo ratings yet
- STI Fuse BrochureDocument4 pagesSTI Fuse Brochurenooruddinkhan1No ratings yet
- PCB Layer Stackup, PCB Stackup Design - PCBCartDocument5 pagesPCB Layer Stackup, PCB Stackup Design - PCBCartRintuMathunniNo ratings yet
- PHY548-Lab ManualDocument29 pagesPHY548-Lab Manualainul sofeaNo ratings yet
- OpenVPN - ArchWikiDocument20 pagesOpenVPN - ArchWikiBoubacarNo ratings yet
- Technical Batch Data Report: 001 Popular Concrete PVT LTD Plant 2, Kakati, BelgaumDocument1 pageTechnical Batch Data Report: 001 Popular Concrete PVT LTD Plant 2, Kakati, BelgaumAshwin PatilNo ratings yet
- Seashell Brochure QuickDocument13 pagesSeashell Brochure Quickzakirostom0% (1)
- 04 Assembly ProgrammingDocument22 pages04 Assembly Programmingakashmehta10No ratings yet
- 2n3906 DatasheetDocument3 pages2n3906 DatasheetZain AliNo ratings yet
- Reference Manual: Updated For Version 2.7 of Capture PolarDocument33 pagesReference Manual: Updated For Version 2.7 of Capture PolarGangaNo ratings yet
- Week 6 Intro To Kernel Modules, Project 2: Sarah Diesburg Florida State UniversityDocument61 pagesWeek 6 Intro To Kernel Modules, Project 2: Sarah Diesburg Florida State Universityrobat2014No ratings yet
- Course 2 Unit 4Document90 pagesCourse 2 Unit 4amit aryaNo ratings yet
- Bachelor of Science in Mathematics Final Year Project Report-IDocument15 pagesBachelor of Science in Mathematics Final Year Project Report-IMattiullah AbbasiNo ratings yet
- High Speed CMOS Logic - 74HC139: Features: DescriptionDocument6 pagesHigh Speed CMOS Logic - 74HC139: Features: Descriptionkiet nguyen trucNo ratings yet
- 2017 Book Phylogenomics PDFDocument227 pages2017 Book Phylogenomics PDFmoreiro2No ratings yet
- Advanced Spreadsheet Skills: Empowerment TechnologyDocument22 pagesAdvanced Spreadsheet Skills: Empowerment TechnologyRavubyNo ratings yet
- A3: Veda Vyasa - (Correct Alternative)Document28 pagesA3: Veda Vyasa - (Correct Alternative)Priyank PatelNo ratings yet