Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Health Care Facilities and Medical Gas and VacuumDocument27 pagesHealth Care Facilities and Medical Gas and VacuumStephen Tabiar100% (1)
- Leaflet CycleManager Ep CycleManager ErDocument7 pagesLeaflet CycleManager Ep CycleManager ErValeska ArdilesNo ratings yet
- Websphere MQ Tutorial For BeginnersDocument13 pagesWebsphere MQ Tutorial For Beginnerssalman786x100% (1)
- Hvac Add OnsDocument8 pagesHvac Add OnsStephen TabiarNo ratings yet
- Table Hvac UapDocument2 pagesTable Hvac UapStephen TabiarNo ratings yet
- Exhaust Vent ScheduleDocument5 pagesExhaust Vent ScheduleStephen TabiarNo ratings yet
- MD Pinoybix 900Document961 pagesMD Pinoybix 900Stephen TabiarNo ratings yet
- 3rd Floor ModelDocument1 page3rd Floor ModelStephen TabiarNo ratings yet
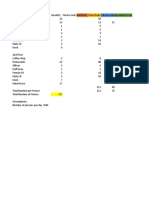
- Cooling Load ScheduleDocument3 pagesCooling Load ScheduleStephen TabiarNo ratings yet
- Relations With Colleagu Es and Associate S: By: Stephen Carl C. TabiarDocument16 pagesRelations With Colleagu Es and Associate S: By: Stephen Carl C. TabiarStephen TabiarNo ratings yet
- Case 1: Translational Masses Connected by A Rigid BarDocument4 pagesCase 1: Translational Masses Connected by A Rigid BarStephen TabiarNo ratings yet
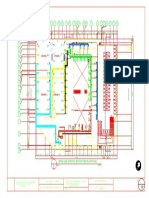
- M K J'' G' G L K' J' J I H' H F E' E D' D C' C B A: Department StoreDocument1 pageM K J'' G' G L K' J' J I H' H F E' E D' D C' C B A: Department StoreStephen TabiarNo ratings yet
- Assignment 1Document2 pagesAssignment 1Stephen TabiarNo ratings yet
- Solar Parabolic Dish Stirling Engine System Design, Simulation, and Thermal AnalysisDocument17 pagesSolar Parabolic Dish Stirling Engine System Design, Simulation, and Thermal AnalysisStephen TabiarNo ratings yet
- Assignment 2 - David PDFDocument4 pagesAssignment 2 - David PDFStephen TabiarNo ratings yet
- Plumbing Excel DesignDocument2 pagesPlumbing Excel DesignStephen TabiarNo ratings yet
- GAS PIPING (Autosaved)Document20 pagesGAS PIPING (Autosaved)Stephen TabiarNo ratings yet
- Design of The Collector of A Solar Dish-Stirling SystemDocument9 pagesDesign of The Collector of A Solar Dish-Stirling SystemStephen TabiarNo ratings yet
- Sewage Disposal System Report Tabiar (Autosaved)Document61 pagesSewage Disposal System Report Tabiar (Autosaved)Stephen Tabiar100% (1)
- Report Radiation Exchange Between SurfacesDocument52 pagesReport Radiation Exchange Between SurfacesStephen TabiarNo ratings yet
- Report - Measuring, Cutting, Joining PipesDocument54 pagesReport - Measuring, Cutting, Joining PipesStephen Tabiar100% (1)
- Technical Proposal - Ministry of Agriculture MIS (DRAFT)Document128 pagesTechnical Proposal - Ministry of Agriculture MIS (DRAFT)Felix Ochieng OwiliNo ratings yet
- CSS Lesson 6 Driver Installation and UpdatesDocument18 pagesCSS Lesson 6 Driver Installation and Updatesdelacruzkeizia3No ratings yet
- Factsheet Kone KSP 858 Touchscreen - tcm146 18645Document4 pagesFactsheet Kone KSP 858 Touchscreen - tcm146 18645irfaniclsNo ratings yet
- Abreviaturas OTANDocument20 pagesAbreviaturas OTANOperaciones ConviasaNo ratings yet
- AI Module - LastDocument166 pagesAI Module - Lastkaleb DenekeNo ratings yet
- 1.0.1.2 Class Activity - Top Hacker Shows Us How It Is DoneDocument1 page1.0.1.2 Class Activity - Top Hacker Shows Us How It Is Donec583706No ratings yet
- Bhodhini Swimming - Application PDFDocument3 pagesBhodhini Swimming - Application PDFKvakumarv VallatharasuNo ratings yet
- Information Technology HWDocument2 pagesInformation Technology HWAbishuaNo ratings yet
- Demand Paging: Amna Ahmad Muhammad MustafaDocument24 pagesDemand Paging: Amna Ahmad Muhammad MustafaAmna Ahmad0% (1)
- 2001 Tacoma 5VZ-FE 4x4 ECM Terminals, Manual vs. Automatic All Data Compiled From The 2001 Factory Service Manual Wiring GuideDocument5 pages2001 Tacoma 5VZ-FE 4x4 ECM Terminals, Manual vs. Automatic All Data Compiled From The 2001 Factory Service Manual Wiring GuideAlan TangNo ratings yet
- Pgds 1st Semester Hall TicketDocument1 pagePgds 1st Semester Hall TicketRahul ManwatkarNo ratings yet
- Standard Power MOSFET: IRFP 254 V 250 V I 23 A R 0.14Document2 pagesStandard Power MOSFET: IRFP 254 V 250 V I 23 A R 0.14Fran Javi Vila DiazNo ratings yet
- JeeleDocument9 pagesJeeleAnonymous SZDGk7SvGNo ratings yet
- New LL AcknowledgementDocument1 pageNew LL AcknowledgementNISHKARSH. MAURYANo ratings yet
- Machine Learning Using PythonDocument2 pagesMachine Learning Using PythonNarendra SinghNo ratings yet
- Offshore Cai1349 TRM Ets1Document9 pagesOffshore Cai1349 TRM Ets1Ahmed SulaimanNo ratings yet
- Lean Maintenance ManagementDocument42 pagesLean Maintenance ManagementJoaquim ReisNo ratings yet
- Tech Oled RepDocument32 pagesTech Oled Rep046 KISHORENo ratings yet
- Viva Model Lab QSTNDocument9 pagesViva Model Lab QSTNrawon gyanNo ratings yet
- SOW - ODU SwappingDocument1 pageSOW - ODU SwappingsarokarthikarNo ratings yet
- Surge Arrester and Insulator Electrical Test ProgramDocument3 pagesSurge Arrester and Insulator Electrical Test ProgramArjun -No ratings yet
- When The Table Space /database in Hot Backup Mode What Will Happens ?Document2 pagesWhen The Table Space /database in Hot Backup Mode What Will Happens ?raajiNo ratings yet
- Digital Audio Input SelectorDocument2 pagesDigital Audio Input SelectorchakralabsNo ratings yet
- L28 Unit 5 ANALOG AND DIGITAL ELECTRONIC CIRCUITSDocument5 pagesL28 Unit 5 ANALOG AND DIGITAL ELECTRONIC CIRCUITSDr G VijayakumarNo ratings yet
- SMC™-50 Solid-State Smart Motor Controller: Selection GuideDocument58 pagesSMC™-50 Solid-State Smart Motor Controller: Selection GuideYusef Nome C.No ratings yet
- Registration Manual UopeopleDocument7 pagesRegistration Manual UopeopleAshraful AlamNo ratings yet
- Roan MDocument35 pagesRoan MJollibar ArcalasNo ratings yet
- KTM-Packtalk Edge Scroll PG en 01Document21 pagesKTM-Packtalk Edge Scroll PG en 01a.mazanikasNo ratings yet