
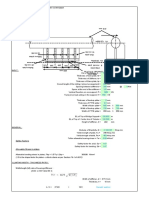
Dynamic Analysis Wind Turbine Flexible Foundation
Dynamic Analysis Wind Turbine Flexible Foundation
You might also like
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- E-Jet 1800 User Manaul v1Document53 pagesE-Jet 1800 User Manaul v1Wilman Leal50% (2)
- Earthquake Transportation ProcedureDocument14 pagesEarthquake Transportation ProcedureJackobNo ratings yet
- West Coast Scotland Offshore WindDocument7 pagesWest Coast Scotland Offshore WindadepomaNo ratings yet
- Shallow FoundationDocument12 pagesShallow FoundationPutawNo ratings yet
- Offshore Platform LN1 AU 06-12-2019Document67 pagesOffshore Platform LN1 AU 06-12-2019eng27alijabbarNo ratings yet
- Innovative Tools For Offshore Wind and DC GridsDocument98 pagesInnovative Tools For Offshore Wind and DC GridsLisaNo ratings yet
- COMBO Glossary Lexicon 122011Document388 pagesCOMBO Glossary Lexicon 122011syakirohNo ratings yet
- Investigation of Jack-Up Leg Extension For Deep Water OperationsDocument14 pagesInvestigation of Jack-Up Leg Extension For Deep Water OperationsKerim Ilgin ErtaşNo ratings yet
- 1 PBDocument12 pages1 PBa.moghimi.nkzNo ratings yet
- 02 - Subsea Past and FutureDocument29 pages02 - Subsea Past and FutureRaphael Owusu kyerematengNo ratings yet
- 1 Moment 2 Moment I: ST NDDocument1 page1 Moment 2 Moment I: ST NDKhairil AzmanNo ratings yet
- Artificial Island ( S) For The Construction and O&M of Offshore Wind FarmsDocument25 pagesArtificial Island ( S) For The Construction and O&M of Offshore Wind FarmsBridget WeissNo ratings yet
- Loading ConditionDocument2 pagesLoading ConditionriandiNo ratings yet
- Electronic Protect 9-18-14 AOC PresentationDocument33 pagesElectronic Protect 9-18-14 AOC PresentationFrancisco GarayNo ratings yet
- Mathcad - Case-4 (22 OD) HYDDocument4 pagesMathcad - Case-4 (22 OD) HYDAdvisNo ratings yet
- Electronic Support 9-3-14 AOC PresentationDocument24 pagesElectronic Support 9-3-14 AOC PresentationFrancisco GarayNo ratings yet
- Caisson 2Document11 pagesCaisson 2Supritha KNo ratings yet
- Design Sheet: 1. Material PropertiesDocument10 pagesDesign Sheet: 1. Material PropertiesJun MichaelNo ratings yet
- ESM FinalDocument17 pagesESM FinalRashmi Deshmukh100% (1)
- Geometry Materials: AASHTO Standard Specification, Division 1ADocument5 pagesGeometry Materials: AASHTO Standard Specification, Division 1AHayman AhmedNo ratings yet
- Fact Sheet BorWin5Document1 pageFact Sheet BorWin5EmmanuelNo ratings yet
- Tyra Future Development Tyra East G (TEG) & Tyra East H (TEH) JacketsDocument1 pageTyra Future Development Tyra East G (TEG) & Tyra East H (TEH) JacketsEmmanuelNo ratings yet
- Low Tide Collision: Lowest Astronomical Tide-EL (+) 0.00 MDocument2 pagesLow Tide Collision: Lowest Astronomical Tide-EL (+) 0.00 MSamantha HartNo ratings yet
- rr037 JackupsDocument90 pagesrr037 JackupsYoungkook KimNo ratings yet
- 1.d. Overall Damping For Piled Offshore Support StructuresDocument4 pages1.d. Overall Damping For Piled Offshore Support StructuresShokoofeAlaviNo ratings yet
- Offshore Riser CalculationDocument10 pagesOffshore Riser CalculationSergio MuñozNo ratings yet
- Data Sheet For Anchor (2472)Document2 pagesData Sheet For Anchor (2472)Romawi Stevyandi100% (1)
- The Compression Platform CA KU A1 Includes Tripods and BridgesDocument1 pageThe Compression Platform CA KU A1 Includes Tripods and BridgesEmmanuelNo ratings yet
- Hitung Tanah SONDIRDocument1 pageHitung Tanah SONDIRJefry AjaNo ratings yet
- RealPower Issue 26Document136 pagesRealPower Issue 26Nick MedicNo ratings yet
- Principal Particulars: No Marked Abs Grade: Ab/A SteelDocument19 pagesPrincipal Particulars: No Marked Abs Grade: Ab/A SteelATAER SEZERNo ratings yet
- Lat Pile BDocument20 pagesLat Pile BSabrina ImloulNo ratings yet
- Bridge 10 Sunshade DesignDocument4 pagesBridge 10 Sunshade DesignSai SushankNo ratings yet
- Change The Pile Diameter Pile Dia. (MM) Pile Spacing (M) E (KN/MM) A (MM) I (MM)Document2 pagesChange The Pile Diameter Pile Dia. (MM) Pile Spacing (M) E (KN/MM) A (MM) I (MM)jmpkumaraNo ratings yet
- 04 - Host PlatformDocument45 pages04 - Host PlatformRaphael Owusu kyerematengNo ratings yet
- RSW - Buoys InstallationDocument9 pagesRSW - Buoys Installationothman salahNo ratings yet
- Wave Loads On Small BodiesDocument31 pagesWave Loads On Small BodiesannamkeerthiNo ratings yet
- AD-G34-1041-R2734 - Seafox 8 at ZULF GOSP-2 ACPDocument8 pagesAD-G34-1041-R2734 - Seafox 8 at ZULF GOSP-2 ACPSinojKumarMalipronNo ratings yet
- Electronic Attack - 8-21-14 AOC Presentation UpdateDocument22 pagesElectronic Attack - 8-21-14 AOC Presentation UpdateFrancisco GarayNo ratings yet
- Hogging Sagging Fpso PDF FreeDocument34 pagesHogging Sagging Fpso PDF Freejami sharat chandNo ratings yet
- Justification Member UCDocument23 pagesJustification Member UCigifaniNo ratings yet
- Where:: No. Zi Yj (Z) T P (Z) P (Z) P (Z)Document1 pageWhere:: No. Zi Yj (Z) T P (Z) P (Z) P (Z)Thinh ViproNo ratings yet
- Top Int Meth - MSL.1Document106 pagesTop Int Meth - MSL.1Eyoma EtimNo ratings yet
- WB-MJM-MYNLNG Final Report-160617VVF (Revised-Final) 247 PGDocument247 pagesWB-MJM-MYNLNG Final Report-160617VVF (Revised-Final) 247 PGChaitanya SoodNo ratings yet
- Rev 1.0 Pck2l Bukit Panjang-2 Location Final Report (Sub - 05!14!0983c)Document192 pagesRev 1.0 Pck2l Bukit Panjang-2 Location Final Report (Sub - 05!14!0983c)dennis rio perdanaNo ratings yet
- Dent Depth CalculationDocument1 pageDent Depth CalculationSai SushankNo ratings yet
- Code Checking BeamsDocument45 pagesCode Checking BeamsJackobNo ratings yet
- Technical Policy BoardDocument15 pagesTechnical Policy BoardDaniel IonasNo ratings yet
- SPD12 WRE - 8207 - 06 - 05 - 85 - Rev02Document221 pagesSPD12 WRE - 8207 - 06 - 05 - 85 - Rev02Mohammad Reza AnghaeiNo ratings yet
- Critical Breaking Wave Height RatioDocument13 pagesCritical Breaking Wave Height RatioRodTurnerNo ratings yet
- Fatigue-Mat 4-DeterministicDocument35 pagesFatigue-Mat 4-Deterministicfahmi rajziNo ratings yet
- (DNV) Det Norske Veritas - 2005 - Material Risk - Ageing Offshore InstallationsDocument66 pages(DNV) Det Norske Veritas - 2005 - Material Risk - Ageing Offshore InstallationsKaroline Neumann100% (1)
- API Final Report For Foundation AssessmentDocument299 pagesAPI Final Report For Foundation AssessmentNasromer FaragNo ratings yet
- 01 - IntroductionDocument22 pages01 - IntroductionRaphael Owusu kyerematengNo ratings yet
- MSF Bridge Support Stiffener DesignDocument7 pagesMSF Bridge Support Stiffener DesignSai SushankNo ratings yet
- Chapter J Design of ConnectionsDocument16 pagesChapter J Design of Connectionsghosh73No ratings yet
- Gravity Base Foundations For Offshore Wind FarmDocument121 pagesGravity Base Foundations For Offshore Wind FarmUsable ToolsNo ratings yet
- Strengthened Joint Design-UpdateDocument4 pagesStrengthened Joint Design-UpdatePhan Trọng NghĩaNo ratings yet
- Modified Expression For The Failure Criterion of Bucket Foundations Subjected To Combined LoadingDocument11 pagesModified Expression For The Failure Criterion of Bucket Foundations Subjected To Combined LoadingDang Quang MinhNo ratings yet
- Adhikari - Bhattacharya - 2011 - Vibrations of Wind-Turbines Considering SSIDocument28 pagesAdhikari - Bhattacharya - 2011 - Vibrations of Wind-Turbines Considering SSIIWINOSA AGHEDONo ratings yet
- Design of Steel Concrete Composite StructuresDocument15 pagesDesign of Steel Concrete Composite StructuresHaithem NessNo ratings yet
- Dzexams 3as Arabe t1 20151 432886Document2 pagesDzexams 3as Arabe t1 20151 432886Haithem NessNo ratings yet
- Computer Aided Design of Cable Membrane Structures (Saxe-Coburg Publications On Computational Engineering) by B. H. V. Topping, P. IvanyiDocument133 pagesComputer Aided Design of Cable Membrane Structures (Saxe-Coburg Publications On Computational Engineering) by B. H. V. Topping, P. IvanyiHaithem NessNo ratings yet
- Space Frame PDFDocument6 pagesSpace Frame PDFHaithem NessNo ratings yet
- Dzexams 4am Sciences Bem 20161 1 PDFDocument4 pagesDzexams 4am Sciences Bem 20161 1 PDFHaithem NessNo ratings yet
- Cable Erection of Krasnodar Stadium Suspended RoofDocument9 pagesCable Erection of Krasnodar Stadium Suspended RoofHaithem NessNo ratings yet
- حل بكالوريا تجريبي أشبال أمة رياضيات 2018 ع تDocument5 pagesحل بكالوريا تجريبي أشبال أمة رياضيات 2018 ع تHaithem NessNo ratings yet
- EAU-1,19000 CFM at 75 MM StaticDocument1 pageEAU-1,19000 CFM at 75 MM StaticdesignhvacNo ratings yet
- Dateq Th2 Telephone Hybrid User ManualDocument9 pagesDateq Th2 Telephone Hybrid User Manualalex calinNo ratings yet
- BIAINDocument198 pagesBIAINNicholas JohnNo ratings yet
- Calculation of Amsayu HomeworkDocument1 pageCalculation of Amsayu HomeworkGautamNo ratings yet
- LčkiuztrDocument16 pagesLčkiuztrZahid BabaićNo ratings yet
- 9/6, Lpsohphqwdwlrqvri Duwlilfldoqhxudoqhwzrunv: Aboratoire de IcroélectroniqueDocument8 pages9/6, Lpsohphqwdwlrqvri Duwlilfldoqhxudoqhwzrunv: Aboratoire de Icroélectroniquevarsha raichalNo ratings yet
- 5.1 Overview of VibrationsDocument56 pages5.1 Overview of VibrationsAbhishek PandeyNo ratings yet
- HybridcapacitorDocument23 pagesHybridcapacitorMathir LiansyahNo ratings yet
- Design Calculation of Worm and Worm Gear Endurance StrengthDocument9 pagesDesign Calculation of Worm and Worm Gear Endurance StrengthVenkateswaran venkateswaranNo ratings yet
- Polynomials Chapter Wise Important Questions Class 10 MathematicsDocument25 pagesPolynomials Chapter Wise Important Questions Class 10 MathematicsPrasad PillarisettiNo ratings yet
- Design and Size DuctworkDocument6 pagesDesign and Size Ductworkwilderness_666No ratings yet
- Important Maths QuestionsDocument15 pagesImportant Maths QuestionsArun KumarvermaNo ratings yet
- Discrete-Time Fourier Analysis Discrete-Time Fourier AnalysisDocument37 pagesDiscrete-Time Fourier Analysis Discrete-Time Fourier AnalysisTrần Ngọc LâmNo ratings yet
- Lecture 13 Anderson's Theory of FaultingDocument26 pagesLecture 13 Anderson's Theory of Faultingblackoil1981No ratings yet
- RP - 16.4 Nomenclature and Terminology For Extension-Type Variable Area Meters (Rotameters)Document10 pagesRP - 16.4 Nomenclature and Terminology For Extension-Type Variable Area Meters (Rotameters)milecsaNo ratings yet
- Machinery Space FireDocument3 pagesMachinery Space FireenglisgoNo ratings yet
- Mixing (Industrial Pharmacy)Document8 pagesMixing (Industrial Pharmacy)Haroon Rahim71% (7)
- Ssis Data Type Cheat SheetDocument1 pageSsis Data Type Cheat SheetebtrainNo ratings yet
- Aerial Catalog 2 - 15Document1 pageAerial Catalog 2 - 15Juan Carlos ZapataNo ratings yet
- Solution Manual For Geometry 1St Edition by Martin Gay Isbn 0134173651 9780134173658 Full Chapter PDFDocument27 pagesSolution Manual For Geometry 1St Edition by Martin Gay Isbn 0134173651 9780134173658 Full Chapter PDFsteven.davis655100% (10)
- Data Link LayerDocument107 pagesData Link LayerRekha V RNo ratings yet
- Albertina Castro-Integral Imaging With Large Depth of Field Using An Asymmetric Phase MaskDocument8 pagesAlbertina Castro-Integral Imaging With Large Depth of Field Using An Asymmetric Phase MaskJorge Francisco Victoria RodriguezNo ratings yet
- Warm Up Exam # 2 QuestionerDocument6 pagesWarm Up Exam # 2 QuestionerJimmy GutierrezNo ratings yet
- Ntse Mat Question PaperDocument32 pagesNtse Mat Question PaperSaraswathi v kNo ratings yet
- 45BDocument5 pages45BJamie SchultzNo ratings yet
- Beer Sales With AnalysisDocument84 pagesBeer Sales With AnalysisBhogadi BharadwajaNo ratings yet
- Flexiflo TankTruckEquipmentsDocument20 pagesFlexiflo TankTruckEquipmentstdecebalus100% (2)
- Lightening Arrestar: The Most Common Device Used For Protection The Power System Against High VoltageDocument28 pagesLightening Arrestar: The Most Common Device Used For Protection The Power System Against High VoltagePallavi JainNo ratings yet
- Sorulara Uygun Cevabı Seçin Ve Yuvarlak Içine Alın.Document5 pagesSorulara Uygun Cevabı Seçin Ve Yuvarlak Içine Alın.aysen88No ratings yet































































































Download as pdf or txt
You might also like
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- E-Jet 1800 User Manaul v1Document53 pagesE-Jet 1800 User Manaul v1Wilman Leal50% (2)
- Earthquake Transportation ProcedureDocument14 pagesEarthquake Transportation ProcedureJackobNo ratings yet
- West Coast Scotland Offshore WindDocument7 pagesWest Coast Scotland Offshore WindadepomaNo ratings yet
- Shallow FoundationDocument12 pagesShallow FoundationPutawNo ratings yet
- Offshore Platform LN1 AU 06-12-2019Document67 pagesOffshore Platform LN1 AU 06-12-2019eng27alijabbarNo ratings yet
- Innovative Tools For Offshore Wind and DC GridsDocument98 pagesInnovative Tools For Offshore Wind and DC GridsLisaNo ratings yet
- COMBO Glossary Lexicon 122011Document388 pagesCOMBO Glossary Lexicon 122011syakirohNo ratings yet
- Investigation of Jack-Up Leg Extension For Deep Water OperationsDocument14 pagesInvestigation of Jack-Up Leg Extension For Deep Water OperationsKerim Ilgin ErtaşNo ratings yet
- 1 PBDocument12 pages1 PBa.moghimi.nkzNo ratings yet
- 02 - Subsea Past and FutureDocument29 pages02 - Subsea Past and FutureRaphael Owusu kyerematengNo ratings yet
- 1 Moment 2 Moment I: ST NDDocument1 page1 Moment 2 Moment I: ST NDKhairil AzmanNo ratings yet
- Artificial Island ( S) For The Construction and O&M of Offshore Wind FarmsDocument25 pagesArtificial Island ( S) For The Construction and O&M of Offshore Wind FarmsBridget WeissNo ratings yet
- Loading ConditionDocument2 pagesLoading ConditionriandiNo ratings yet
- Electronic Protect 9-18-14 AOC PresentationDocument33 pagesElectronic Protect 9-18-14 AOC PresentationFrancisco GarayNo ratings yet
- Mathcad - Case-4 (22 OD) HYDDocument4 pagesMathcad - Case-4 (22 OD) HYDAdvisNo ratings yet
- Electronic Support 9-3-14 AOC PresentationDocument24 pagesElectronic Support 9-3-14 AOC PresentationFrancisco GarayNo ratings yet
- Caisson 2Document11 pagesCaisson 2Supritha KNo ratings yet
- Design Sheet: 1. Material PropertiesDocument10 pagesDesign Sheet: 1. Material PropertiesJun MichaelNo ratings yet
- ESM FinalDocument17 pagesESM FinalRashmi Deshmukh100% (1)
- Geometry Materials: AASHTO Standard Specification, Division 1ADocument5 pagesGeometry Materials: AASHTO Standard Specification, Division 1AHayman AhmedNo ratings yet
- Fact Sheet BorWin5Document1 pageFact Sheet BorWin5EmmanuelNo ratings yet
- Tyra Future Development Tyra East G (TEG) & Tyra East H (TEH) JacketsDocument1 pageTyra Future Development Tyra East G (TEG) & Tyra East H (TEH) JacketsEmmanuelNo ratings yet
- Low Tide Collision: Lowest Astronomical Tide-EL (+) 0.00 MDocument2 pagesLow Tide Collision: Lowest Astronomical Tide-EL (+) 0.00 MSamantha HartNo ratings yet
- rr037 JackupsDocument90 pagesrr037 JackupsYoungkook KimNo ratings yet
- 1.d. Overall Damping For Piled Offshore Support StructuresDocument4 pages1.d. Overall Damping For Piled Offshore Support StructuresShokoofeAlaviNo ratings yet
- Offshore Riser CalculationDocument10 pagesOffshore Riser CalculationSergio MuñozNo ratings yet
- Data Sheet For Anchor (2472)Document2 pagesData Sheet For Anchor (2472)Romawi Stevyandi100% (1)
- The Compression Platform CA KU A1 Includes Tripods and BridgesDocument1 pageThe Compression Platform CA KU A1 Includes Tripods and BridgesEmmanuelNo ratings yet
- Hitung Tanah SONDIRDocument1 pageHitung Tanah SONDIRJefry AjaNo ratings yet
- RealPower Issue 26Document136 pagesRealPower Issue 26Nick MedicNo ratings yet
- Principal Particulars: No Marked Abs Grade: Ab/A SteelDocument19 pagesPrincipal Particulars: No Marked Abs Grade: Ab/A SteelATAER SEZERNo ratings yet
- Lat Pile BDocument20 pagesLat Pile BSabrina ImloulNo ratings yet
- Bridge 10 Sunshade DesignDocument4 pagesBridge 10 Sunshade DesignSai SushankNo ratings yet
- Change The Pile Diameter Pile Dia. (MM) Pile Spacing (M) E (KN/MM) A (MM) I (MM)Document2 pagesChange The Pile Diameter Pile Dia. (MM) Pile Spacing (M) E (KN/MM) A (MM) I (MM)jmpkumaraNo ratings yet
- 04 - Host PlatformDocument45 pages04 - Host PlatformRaphael Owusu kyerematengNo ratings yet
- RSW - Buoys InstallationDocument9 pagesRSW - Buoys Installationothman salahNo ratings yet
- Wave Loads On Small BodiesDocument31 pagesWave Loads On Small BodiesannamkeerthiNo ratings yet
- AD-G34-1041-R2734 - Seafox 8 at ZULF GOSP-2 ACPDocument8 pagesAD-G34-1041-R2734 - Seafox 8 at ZULF GOSP-2 ACPSinojKumarMalipronNo ratings yet
- Electronic Attack - 8-21-14 AOC Presentation UpdateDocument22 pagesElectronic Attack - 8-21-14 AOC Presentation UpdateFrancisco GarayNo ratings yet
- Hogging Sagging Fpso PDF FreeDocument34 pagesHogging Sagging Fpso PDF Freejami sharat chandNo ratings yet
- Justification Member UCDocument23 pagesJustification Member UCigifaniNo ratings yet
- Where:: No. Zi Yj (Z) T P (Z) P (Z) P (Z)Document1 pageWhere:: No. Zi Yj (Z) T P (Z) P (Z) P (Z)Thinh ViproNo ratings yet
- Top Int Meth - MSL.1Document106 pagesTop Int Meth - MSL.1Eyoma EtimNo ratings yet
- WB-MJM-MYNLNG Final Report-160617VVF (Revised-Final) 247 PGDocument247 pagesWB-MJM-MYNLNG Final Report-160617VVF (Revised-Final) 247 PGChaitanya SoodNo ratings yet
- Rev 1.0 Pck2l Bukit Panjang-2 Location Final Report (Sub - 05!14!0983c)Document192 pagesRev 1.0 Pck2l Bukit Panjang-2 Location Final Report (Sub - 05!14!0983c)dennis rio perdanaNo ratings yet
- Dent Depth CalculationDocument1 pageDent Depth CalculationSai SushankNo ratings yet
- Code Checking BeamsDocument45 pagesCode Checking BeamsJackobNo ratings yet
- Technical Policy BoardDocument15 pagesTechnical Policy BoardDaniel IonasNo ratings yet
- SPD12 WRE - 8207 - 06 - 05 - 85 - Rev02Document221 pagesSPD12 WRE - 8207 - 06 - 05 - 85 - Rev02Mohammad Reza AnghaeiNo ratings yet
- Critical Breaking Wave Height RatioDocument13 pagesCritical Breaking Wave Height RatioRodTurnerNo ratings yet
- Fatigue-Mat 4-DeterministicDocument35 pagesFatigue-Mat 4-Deterministicfahmi rajziNo ratings yet
- (DNV) Det Norske Veritas - 2005 - Material Risk - Ageing Offshore InstallationsDocument66 pages(DNV) Det Norske Veritas - 2005 - Material Risk - Ageing Offshore InstallationsKaroline Neumann100% (1)
- API Final Report For Foundation AssessmentDocument299 pagesAPI Final Report For Foundation AssessmentNasromer FaragNo ratings yet
- 01 - IntroductionDocument22 pages01 - IntroductionRaphael Owusu kyerematengNo ratings yet
- MSF Bridge Support Stiffener DesignDocument7 pagesMSF Bridge Support Stiffener DesignSai SushankNo ratings yet
- Chapter J Design of ConnectionsDocument16 pagesChapter J Design of Connectionsghosh73No ratings yet
- Gravity Base Foundations For Offshore Wind FarmDocument121 pagesGravity Base Foundations For Offshore Wind FarmUsable ToolsNo ratings yet
- Strengthened Joint Design-UpdateDocument4 pagesStrengthened Joint Design-UpdatePhan Trọng NghĩaNo ratings yet
- Modified Expression For The Failure Criterion of Bucket Foundations Subjected To Combined LoadingDocument11 pagesModified Expression For The Failure Criterion of Bucket Foundations Subjected To Combined LoadingDang Quang MinhNo ratings yet
- Adhikari - Bhattacharya - 2011 - Vibrations of Wind-Turbines Considering SSIDocument28 pagesAdhikari - Bhattacharya - 2011 - Vibrations of Wind-Turbines Considering SSIIWINOSA AGHEDONo ratings yet
- Design of Steel Concrete Composite StructuresDocument15 pagesDesign of Steel Concrete Composite StructuresHaithem NessNo ratings yet
- Dzexams 3as Arabe t1 20151 432886Document2 pagesDzexams 3as Arabe t1 20151 432886Haithem NessNo ratings yet
- Computer Aided Design of Cable Membrane Structures (Saxe-Coburg Publications On Computational Engineering) by B. H. V. Topping, P. IvanyiDocument133 pagesComputer Aided Design of Cable Membrane Structures (Saxe-Coburg Publications On Computational Engineering) by B. H. V. Topping, P. IvanyiHaithem NessNo ratings yet
- Space Frame PDFDocument6 pagesSpace Frame PDFHaithem NessNo ratings yet
- Dzexams 4am Sciences Bem 20161 1 PDFDocument4 pagesDzexams 4am Sciences Bem 20161 1 PDFHaithem NessNo ratings yet
- Cable Erection of Krasnodar Stadium Suspended RoofDocument9 pagesCable Erection of Krasnodar Stadium Suspended RoofHaithem NessNo ratings yet
- حل بكالوريا تجريبي أشبال أمة رياضيات 2018 ع تDocument5 pagesحل بكالوريا تجريبي أشبال أمة رياضيات 2018 ع تHaithem NessNo ratings yet
- EAU-1,19000 CFM at 75 MM StaticDocument1 pageEAU-1,19000 CFM at 75 MM StaticdesignhvacNo ratings yet
- Dateq Th2 Telephone Hybrid User ManualDocument9 pagesDateq Th2 Telephone Hybrid User Manualalex calinNo ratings yet
- BIAINDocument198 pagesBIAINNicholas JohnNo ratings yet
- Calculation of Amsayu HomeworkDocument1 pageCalculation of Amsayu HomeworkGautamNo ratings yet
- LčkiuztrDocument16 pagesLčkiuztrZahid BabaićNo ratings yet
- 9/6, Lpsohphqwdwlrqvri Duwlilfldoqhxudoqhwzrunv: Aboratoire de IcroélectroniqueDocument8 pages9/6, Lpsohphqwdwlrqvri Duwlilfldoqhxudoqhwzrunv: Aboratoire de Icroélectroniquevarsha raichalNo ratings yet
- 5.1 Overview of VibrationsDocument56 pages5.1 Overview of VibrationsAbhishek PandeyNo ratings yet
- HybridcapacitorDocument23 pagesHybridcapacitorMathir LiansyahNo ratings yet
- Design Calculation of Worm and Worm Gear Endurance StrengthDocument9 pagesDesign Calculation of Worm and Worm Gear Endurance StrengthVenkateswaran venkateswaranNo ratings yet
- Polynomials Chapter Wise Important Questions Class 10 MathematicsDocument25 pagesPolynomials Chapter Wise Important Questions Class 10 MathematicsPrasad PillarisettiNo ratings yet
- Design and Size DuctworkDocument6 pagesDesign and Size Ductworkwilderness_666No ratings yet
- Important Maths QuestionsDocument15 pagesImportant Maths QuestionsArun KumarvermaNo ratings yet
- Discrete-Time Fourier Analysis Discrete-Time Fourier AnalysisDocument37 pagesDiscrete-Time Fourier Analysis Discrete-Time Fourier AnalysisTrần Ngọc LâmNo ratings yet
- Lecture 13 Anderson's Theory of FaultingDocument26 pagesLecture 13 Anderson's Theory of Faultingblackoil1981No ratings yet
- RP - 16.4 Nomenclature and Terminology For Extension-Type Variable Area Meters (Rotameters)Document10 pagesRP - 16.4 Nomenclature and Terminology For Extension-Type Variable Area Meters (Rotameters)milecsaNo ratings yet
- Machinery Space FireDocument3 pagesMachinery Space FireenglisgoNo ratings yet
- Mixing (Industrial Pharmacy)Document8 pagesMixing (Industrial Pharmacy)Haroon Rahim71% (7)
- Ssis Data Type Cheat SheetDocument1 pageSsis Data Type Cheat SheetebtrainNo ratings yet
- Aerial Catalog 2 - 15Document1 pageAerial Catalog 2 - 15Juan Carlos ZapataNo ratings yet
- Solution Manual For Geometry 1St Edition by Martin Gay Isbn 0134173651 9780134173658 Full Chapter PDFDocument27 pagesSolution Manual For Geometry 1St Edition by Martin Gay Isbn 0134173651 9780134173658 Full Chapter PDFsteven.davis655100% (10)
- Data Link LayerDocument107 pagesData Link LayerRekha V RNo ratings yet
- Albertina Castro-Integral Imaging With Large Depth of Field Using An Asymmetric Phase MaskDocument8 pagesAlbertina Castro-Integral Imaging With Large Depth of Field Using An Asymmetric Phase MaskJorge Francisco Victoria RodriguezNo ratings yet
- Warm Up Exam # 2 QuestionerDocument6 pagesWarm Up Exam # 2 QuestionerJimmy GutierrezNo ratings yet
- Ntse Mat Question PaperDocument32 pagesNtse Mat Question PaperSaraswathi v kNo ratings yet
- 45BDocument5 pages45BJamie SchultzNo ratings yet
- Beer Sales With AnalysisDocument84 pagesBeer Sales With AnalysisBhogadi BharadwajaNo ratings yet
- Flexiflo TankTruckEquipmentsDocument20 pagesFlexiflo TankTruckEquipmentstdecebalus100% (2)
- Lightening Arrestar: The Most Common Device Used For Protection The Power System Against High VoltageDocument28 pagesLightening Arrestar: The Most Common Device Used For Protection The Power System Against High VoltagePallavi JainNo ratings yet
- Sorulara Uygun Cevabı Seçin Ve Yuvarlak Içine Alın.Document5 pagesSorulara Uygun Cevabı Seçin Ve Yuvarlak Içine Alın.aysen88No ratings yet