Download as doc, pdf, or txt
You might also like
- TarsosDSP 2.3 ManualDocument14 pagesTarsosDSP 2.3 ManualbenitoNo ratings yet
- BS 6840-14Document14 pagesBS 6840-14Jeff Anderson Collins100% (1)
- Si5351 VFO - InoDocument6 pagesSi5351 VFO - Inoc.bhuvaneswaranNo ratings yet
- Manual Adjust For RTC Clock With Arduino and 7-Segment LEDDocument21 pagesManual Adjust For RTC Clock With Arduino and 7-Segment LEDfrasekh100% (1)
- Program ESC 2019Document8 pagesProgram ESC 2019Aris100% (1)
- Source Code-234Document9 pagesSource Code-234Bryan Joshua SalvidarNo ratings yet
- AR1731 AbstractDocument12 pagesAR1731 AbstracttagezNo ratings yet
- Isd Code4Document5 pagesIsd Code4Khushi AgrawalNo ratings yet
- F - Cpu: #Define #Include #Include #IncludeDocument8 pagesF - Cpu: #Define #Include #Include #IncludePhenias ManyashaNo ratings yet
- GPS CodingDocument13 pagesGPS CodinghimanshuNo ratings yet
- Proiecte ArduinoDocument46 pagesProiecte ArduinoSyad AlyNo ratings yet
- CED19I032Document13 pagesCED19I032Pranavram VNo ratings yet
- 공설입 코딩 예제Document8 pages공설입 코딩 예제조연욱No ratings yet
- Lab 5 Report: Đại học Duy Tân Khoa Điện - Điện tửDocument22 pagesLab 5 Report: Đại học Duy Tân Khoa Điện - Điện tửNhân HồNo ratings yet
- Digital Petrol Pump Machine CodeDocument10 pagesDigital Petrol Pump Machine CodeEdhoy ChaosNo ratings yet
- m4 r5 o Level Iot Practical Classes Chapter 4 Diffrent Type of Sensors and ActuatorsDocument15 pagesm4 r5 o Level Iot Practical Classes Chapter 4 Diffrent Type of Sensors and Actuatorspratikshyab685No ratings yet
- IOT Lab ExpDocument10 pagesIOT Lab Expsri kanthNo ratings yet
- Esd Lab - 9Document19 pagesEsd Lab - 9Jampani sarath chandraNo ratings yet
- Lab06 - Smart Home Automation Using SensorsDocument14 pagesLab06 - Smart Home Automation Using SensorsChâu Trần100% (1)
- Libreria Pantalla ArduinoDocument44 pagesLibreria Pantalla ArduinoJuan ArchmanNo ratings yet
- Chuong TrinDocument3 pagesChuong TrinMinh Tiến Bùi HồNo ratings yet
- Tutorial Week 5 AnswersDocument8 pagesTutorial Week 5 Answerspotato moon berryNo ratings yet
- PC 5Document8 pagesPC 5Miguel RodasNo ratings yet
- #Define #Define #Define #Define #Define #Define #Define #DefineDocument6 pages#Define #Define #Define #Define #Define #Define #Define #Defineอํานาจ จันทรNo ratings yet
- ECGDocument8 pagesECGGuna lakshmiNo ratings yet
- PIC18 Pulse Width ModulationDocument16 pagesPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- Computer For ABEDocument8 pagesComputer For ABELyka Mae MancolNo ratings yet
- Lab 13Document11 pagesLab 13ubaidNo ratings yet
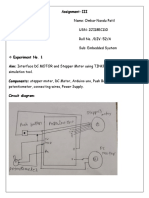
- Name: Omkar Nandu Patil USN: 2JI18EC110 Roll No. /DIV: 52/A Sub: Embedded SystemDocument22 pagesName: Omkar Nandu Patil USN: 2JI18EC110 Roll No. /DIV: 52/A Sub: Embedded SystemOMKAR PATILNo ratings yet
- IOT Patient Health Monitoring ProjectDocument7 pagesIOT Patient Health Monitoring ProjectThorat Kunal BTN-2019-70No ratings yet
- EZvfoDocument2 pagesEZvfofabi235No ratings yet
- SodaPDF-converted-Si5351 RXTX VFO V3Document12 pagesSodaPDF-converted-Si5351 RXTX VFO V3LU8DIW Roberto MartinezNo ratings yet
- DocumentDocument6 pagesDocumenttekousendersNo ratings yet
- Lab 11Document18 pagesLab 11ubaidNo ratings yet
- Codigo LCD C ModificadoDocument3 pagesCodigo LCD C ModificadoMartinQuintanaCasusol100% (1)
- Fa20-Bee-150 MP Lab Report - 10Document6 pagesFa20-Bee-150 MP Lab Report - 10Saadat KhanNo ratings yet
- Ee 222 CepDocument10 pagesEe 222 CepObed AhmadNo ratings yet
- Notes Arduino NanoDocument10 pagesNotes Arduino NanoManfredHNo ratings yet
- EDM18B010 - Expt4-Embedded System Design PracticeDocument9 pagesEDM18B010 - Expt4-Embedded System Design PracticeCHIRAG C M CHIRAG C MNo ratings yet
- Assignment 1 ReportDocument19 pagesAssignment 1 ReportJyiou YimushiNo ratings yet
- CodeDocument9 pagesCodeMuHammad TaHir HasSanNo ratings yet
- Robotics Programs PDFDocument19 pagesRobotics Programs PDFLata SinhaNo ratings yet
- Pic16f877a Practical ProgramsDocument39 pagesPic16f877a Practical ProgramsBarath IyerNo ratings yet
- Evd19i018-Esdp Lab 9Document18 pagesEvd19i018-Esdp Lab 9Jampani sarath chandraNo ratings yet
- TFT Spi Display TestDocument5 pagesTFT Spi Display TestSalvatores ColombosNo ratings yet
- Project1 1Document18 pagesProject1 1Bharath KumarNo ratings yet
- Tsl230r SensorDocument19 pagesTsl230r SensorRaquel Lòpez CamposNo ratings yet
- Arduino Based Automated Test Equipment (Progress Report) : Group MembersDocument13 pagesArduino Based Automated Test Equipment (Progress Report) : Group MembersMahnoor SalmanNo ratings yet
- GSM (Global System For Mobile Communication) : Motion DetectorDocument6 pagesGSM (Global System For Mobile Communication) : Motion DetectorJoeNo ratings yet
- Three-Phase Motor Control With STM32F401RET6U: B L D CDocument34 pagesThree-Phase Motor Control With STM32F401RET6U: B L D Cbokic88No ratings yet
- LCDDocument4 pagesLCDPragathi P PaiNo ratings yet
- Code DumpDocument17 pagesCode DumpGameplay OrIgInAlINo ratings yet
- Praktikum V DSP Dengan Menggunakan ARM: Hariyanto (1310125026) Selvira Rahadiningrum Ramelan (1310125027)Document6 pagesPraktikum V DSP Dengan Menggunakan ARM: Hariyanto (1310125026) Selvira Rahadiningrum Ramelan (1310125027)Primaridha SaputraNo ratings yet
- ADS1262 IssueDocument3 pagesADS1262 IssueTeuku Makmur TsaniNo ratings yet
- PidDocument5 pagesPidArif Nugroho100% (1)
- Max6675 Pic16f877aDocument3 pagesMax6675 Pic16f877aVICTOR HUGO HERNANDEZ CISNEROSNo ratings yet
- Anchal2-50 Merged OrganizedDocument10 pagesAnchal2-50 Merged OrganizedANCHAL MADDHESHIYANo ratings yet
- CodigoDocument5 pagesCodigopepe pecasNo ratings yet
- RPMDocument18 pagesRPMCarlos Alberto Venancio PerezNo ratings yet
- DHT11 Sensor: SpecificationsDocument31 pagesDHT11 Sensor: SpecificationsAwais IbrahimNo ratings yet
- Code of Mi ProjectDocument5 pagesCode of Mi ProjectGangeshwar MauryaNo ratings yet
- Huawei OptiX OSN 8800 Transponder Board LSX Hardware DescriptionDocument47 pagesHuawei OptiX OSN 8800 Transponder Board LSX Hardware DescriptionThunder-Link.com100% (1)
- Service Manual: ModelDocument68 pagesService Manual: ModelJory2005No ratings yet
- Minimoog Model D ManualDocument84 pagesMinimoog Model D Manualrickpot 21No ratings yet
- VHDL PrimerDocument552 pagesVHDL Primerapi-194822080% (1)
- Ec8751 Optical CommunicationDocument44 pagesEc8751 Optical CommunicationSwathi RekaNo ratings yet
- Flyer X-Ray en Rev8 PDFDocument4 pagesFlyer X-Ray en Rev8 PDFoctav drutaNo ratings yet
- 6000 Diagnostic LED Numbers and CodesDocument15 pages6000 Diagnostic LED Numbers and CodesAntonio A. BonitaNo ratings yet
- Development of Smart Human Machine Interface PDFDocument4 pagesDevelopment of Smart Human Machine Interface PDFDave EzraNo ratings yet
- Ca Vcontact-Vsc (En S2) D 1VCP000532 PDFDocument56 pagesCa Vcontact-Vsc (En S2) D 1VCP000532 PDFGustavo Rodrigo SantanaNo ratings yet
- Low Cost Digital Panel Meter Designs and Complete Instructions For LCD and LED KitsDocument9 pagesLow Cost Digital Panel Meter Designs and Complete Instructions For LCD and LED KitsLucía MitchellNo ratings yet
- Ansi Tia Eia 570 A Revisited PDFDocument72 pagesAnsi Tia Eia 570 A Revisited PDFosgarsotoNo ratings yet
- Família I.mx21 - Mc9328mx21rmDocument1,086 pagesFamília I.mx21 - Mc9328mx21rmdavydmelo0% (1)
- MidiDocument3 pagesMidiAshna_Jogoo_6985No ratings yet
- Phys133 Lab1Document7 pagesPhys133 Lab1api-427609820No ratings yet
- p3t32 en M h006 Iec WebDocument420 pagesp3t32 en M h006 Iec Webgigiopicheli731No ratings yet
- Limit-Switch For Standard Signals: AD-MK 330 GSDocument2 pagesLimit-Switch For Standard Signals: AD-MK 330 GSМихаил БеребердинNo ratings yet
- Ex B150M V5Document26 pagesEx B150M V5FahrezaNo ratings yet
- Assignment EisDocument4 pagesAssignment Eismohammad ashrafNo ratings yet
- MC9S08FL16Document30 pagesMC9S08FL16Causalia SithaNo ratings yet
- Anderson BridgeDocument2 pagesAnderson BridgeDikesh ShresthaNo ratings yet
- El - SRP - STP 550 Up To 4500Document44 pagesEl - SRP - STP 550 Up To 4500waleedyehia100% (1)
- Firmware Upgrading Process - V20Document5 pagesFirmware Upgrading Process - V20Pavan ReddyNo ratings yet
- Contextual References LatihanDocument5 pagesContextual References LatihanyohanaNo ratings yet
- Neon Flex User Guide 2Document28 pagesNeon Flex User Guide 2Bintar AlfurqanNo ratings yet
- GY-HM250SP SPORTS PRODUCTION STREAMING CAMCORDER ManualDocument200 pagesGY-HM250SP SPORTS PRODUCTION STREAMING CAMCORDER ManualAnonymous 84ArHkK6d100% (1)
- LF3XToperation Manual EnglishDocument13 pagesLF3XToperation Manual Englishwizard1111iamNo ratings yet
- PVI 10.0 Datasheet PDFDocument4 pagesPVI 10.0 Datasheet PDFAnuvesh ChoudhariNo ratings yet
- 6SR5602 0DH43 2AK0 Z - DatasheetDocument2 pages6SR5602 0DH43 2AK0 Z - DatasheetAlexander ArenasNo ratings yet