Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Sailor HF SSB Re2100 Operator ManualDocument52 pagesSailor HF SSB Re2100 Operator ManualYves CourtialNo ratings yet
- Anritsu Ru224aDocument48 pagesAnritsu Ru224asat1118No ratings yet
- Osciloscopios de PC: PCS500 PCS100 / K8031Document26 pagesOsciloscopios de PC: PCS500 PCS100 / K8031Ibai BiNo ratings yet
- HE300 Cat 2015 64-65Document2 pagesHE300 Cat 2015 64-65rebin1988No ratings yet
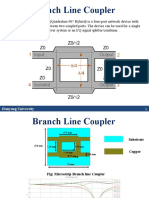
- Branch Line Coupler: Hanyang UniversityDocument7 pagesBranch Line Coupler: Hanyang UniversitySaifulIslamNo ratings yet
- AM Modulators DemodulatorsDocument12 pagesAM Modulators DemodulatorsRANJEET PATELNo ratings yet
- ADC Full Noted PDFDocument79 pagesADC Full Noted PDFVenkatesh TNo ratings yet
- Chapter 2 RF Microwave FiltersDocument118 pagesChapter 2 RF Microwave FiltersbadhanalmominulhaqueNo ratings yet
- Bitx20A Bidirectional SSB Transceiver by Ashhar FarhanDocument9 pagesBitx20A Bidirectional SSB Transceiver by Ashhar FarhanDARU WIRANTONo ratings yet
- CRO & Spectrum Analyzer: Frequency Domain / Time DomainDocument53 pagesCRO & Spectrum Analyzer: Frequency Domain / Time DomainSaurabh GuptNo ratings yet
- Experiment 3 Vco / PLL: 3.1 ObjectiveDocument7 pagesExperiment 3 Vco / PLL: 3.1 ObjectiveRajiv RanjanNo ratings yet
- Kampanya40 22122014Document4 pagesKampanya40 22122014M Baki AslanNo ratings yet
- Service Manual: Ic-F3 Ic-F3s Ic-F4 Ic-F4sDocument52 pagesService Manual: Ic-F3 Ic-F3s Ic-F4 Ic-F4sbaykasifNo ratings yet
- Antenna DatabaseDocument30 pagesAntenna DatabaseTùng Nguyễn0% (1)
- Frequency Bands and Applications: International Telecommunication UnionDocument7 pagesFrequency Bands and Applications: International Telecommunication UniongezahegnNo ratings yet
- EC208 Analog Communication Engineering PDFDocument2 pagesEC208 Analog Communication Engineering PDFMVRajeshMaliyeckalNo ratings yet
- Antenna Installation ProceduresDocument6 pagesAntenna Installation ProceduresOKORIE ChikezieNo ratings yet
- 50 Top Modulation & Demodulation Questions and Answers PDF - McqsDocument9 pages50 Top Modulation & Demodulation Questions and Answers PDF - McqsdhineshNo ratings yet
- 11 22 1395-00-0uhr Thoughts On High Frequency BandDocument11 pages11 22 1395-00-0uhr Thoughts On High Frequency BandKåre AgardhNo ratings yet
- Kathrein FilterDocument108 pagesKathrein FilterabhinandNo ratings yet
- Lecture 4 Introduction To Analog and Digital Communications, S. Haykin, M. Moher, 2ndDocument10 pagesLecture 4 Introduction To Analog and Digital Communications, S. Haykin, M. Moher, 2ndAaron LiNo ratings yet
- Radio Principles Precis 2Document80 pagesRadio Principles Precis 2JOSPHAT YEGONNo ratings yet
- ECE 401L Lab5Document10 pagesECE 401L Lab5mrpatilNo ratings yet
- Stanag 4203TPDocument91 pagesStanag 4203TPCường NguyễnNo ratings yet
- 3GPP Frequency Paramenter CalculationDocument18 pages3GPP Frequency Paramenter CalculationAnonymous W3Nvx2m5No ratings yet
- Best Receiver Eddystone Ever Built - The EC958Document34 pagesBest Receiver Eddystone Ever Built - The EC958Jairo MottaNo ratings yet
- COMMUNICATIONS LAB. Experiment 7: Pulse Width Modulation / DemodulationDocument2 pagesCOMMUNICATIONS LAB. Experiment 7: Pulse Width Modulation / DemodulationBillion money FxNo ratings yet
- W-Interference Processing Guide: Huawei Technologies Co., LTDDocument49 pagesW-Interference Processing Guide: Huawei Technologies Co., LTDSudheera IndrajithNo ratings yet
- Hmc833Lp6Ge: Fractional-N PLL With Integrated Vco 25 - 6000 MHZDocument61 pagesHmc833Lp6Ge: Fractional-N PLL With Integrated Vco 25 - 6000 MHZK.v.RamanaRaoNo ratings yet
- Am Solved ProblemsDocument10 pagesAm Solved Problemssukhi_digra100% (2)