Download as pdf or txt
You might also like
- Barracuda Pi Metal Detector SchematicDocument4 pagesBarracuda Pi Metal Detector Schematicفاتح لبصير33% (3)
- History of Information TechnologyDocument22 pagesHistory of Information TechnologyGabriel Paet50% (2)
- How To Modify Guitar PedalsDocument25 pagesHow To Modify Guitar PedalsChristopher Karl100% (17)
- In Ge Cmd5b4xxxnetDocument11 pagesIn Ge Cmd5b4xxxnetMuhammad azeemNo ratings yet
- PFC Boost Calculation TI PDFDocument15 pagesPFC Boost Calculation TI PDFshawn liNo ratings yet
- DSE8610 PDocument9 pagesDSE8610 PMohammad KhodadadNo ratings yet
- Dac PDFDocument7 pagesDac PDFsanthoshNo ratings yet
- DiDocument6 pagesDipani256No ratings yet
- Main Rport C RDocument21 pagesMain Rport C RHota bNo ratings yet
- Paper - The Best of Both - FINALDocument5 pagesPaper - The Best of Both - FINALGabriela EftemieNo ratings yet
- EDN Design Ideas 1998Document166 pagesEDN Design Ideas 1998chag1956100% (4)
- Ultra Low Power Digitally Controlled Buck ConvDocument9 pagesUltra Low Power Digitally Controlled Buck Convrmsharma1970No ratings yet
- Imp - Delta Sigma WooleyDocument52 pagesImp - Delta Sigma WooleySourav ChakrabortyNo ratings yet
- sn65hvd1050 q1 1702069Document18 pagessn65hvd1050 q1 1702069Fadi NassifNo ratings yet
- Microcontroller and Triacs ON THE 110/240V MAINS: Application NoteDocument12 pagesMicrocontroller and Triacs ON THE 110/240V MAINS: Application NoteMaha SoeNo ratings yet
- Design and Research On Air Conditioning Control Network of Electric Vehicle Based On CAN-busDocument4 pagesDesign and Research On Air Conditioning Control Network of Electric Vehicle Based On CAN-busSabriNo ratings yet
- Nigerian Communications Commission Grant PresentationDocument69 pagesNigerian Communications Commission Grant PresentationNjitnumNo ratings yet
- DDC Solid State Power Controllers 2Document4 pagesDDC Solid State Power Controllers 2David BaillyNo ratings yet
- An 11 GHZ Dual-Sided Self-Calibrating Dynamic CompDocument12 pagesAn 11 GHZ Dual-Sided Self-Calibrating Dynamic CompVictor Matheus LimaNo ratings yet
- Voltage Drop 2Document72 pagesVoltage Drop 2ravzeo36No ratings yet
- Elec Train Manual Appendix A Canbus FinalDocument33 pagesElec Train Manual Appendix A Canbus FinalBenedicto BoladosNo ratings yet
- An Insight Into Single Section Digital Axle Counter (SSDAC-G36)Document52 pagesAn Insight Into Single Section Digital Axle Counter (SSDAC-G36)Sampreeth Nambisan PeriginiNo ratings yet
- Power Clampmeter: DCM2000PDocument3 pagesPower Clampmeter: DCM2000Prama540214No ratings yet
- Design and Simulation of DAC On The Basis of Capacitor ArrayDocument4 pagesDesign and Simulation of DAC On The Basis of Capacitor ArrayAmitNo ratings yet
- REPORTFINALDocument21 pagesREPORTFINALReal HumanityNo ratings yet
- ManDocument11 pagesManSuresh Kumar SaripalliNo ratings yet
- Signal Test Board - D & E Service ManualDocument3 pagesSignal Test Board - D & E Service ManualWL ToposNo ratings yet
- Full Control of A PWM DCAC Converter For AC Voltage RegulationDocument9 pagesFull Control of A PWM DCAC Converter For AC Voltage RegulationAndrés Felipe CelisNo ratings yet
- A High Performance 90 NM CMOS SAR ADC With HybridDocument8 pagesA High Performance 90 NM CMOS SAR ADC With HybridSounakDuttaNo ratings yet
- Condition Based Health Monitoring of TransformersDocument3 pagesCondition Based Health Monitoring of Transformerss.selva9566No ratings yet
- Residential Excellence, The New REX MeterDocument2 pagesResidential Excellence, The New REX MeterAlexanderGabrielQuicañoZapanaNo ratings yet
- A 20 MHZ 200-500 Ma Monolithic Buck Converter For RF ApplicationsDocument6 pagesA 20 MHZ 200-500 Ma Monolithic Buck Converter For RF Applicationsmyeducation1991No ratings yet
- On DC/DC Voltage Buck Converter Control Improvement Through The QFT ApproachDocument8 pagesOn DC/DC Voltage Buck Converter Control Improvement Through The QFT ApproachJessica RossNo ratings yet
- BI Technologies R2R Resistor Ladder NetworksDocument6 pagesBI Technologies R2R Resistor Ladder NetworksChethan JayasimhaNo ratings yet
- Accuracy: Ease of UseDocument2 pagesAccuracy: Ease of UseAbhijitNo ratings yet
- TI Data Converter GuideDocument16 pagesTI Data Converter GuideDavid PostonNo ratings yet
- Design of Analog To Digital Converter To AcquireDocument13 pagesDesign of Analog To Digital Converter To AcquireKingHassan NawazNo ratings yet
- SCR/SCRF Series: Industry's First Choice For Time-Tested Proven ReliabilityDocument8 pagesSCR/SCRF Series: Industry's First Choice For Time-Tested Proven ReliabilityAdrian M FahriNo ratings yet
- Digital Excitation TechnologyDocument11 pagesDigital Excitation TechnologyMohamed RashidNo ratings yet
- Design of A 12-Bit SAR ADC With DigitalDocument4 pagesDesign of A 12-Bit SAR ADC With DigitalY chenNo ratings yet
- A Digital Current-Mode Control TechniqueDocument9 pagesA Digital Current-Mode Control TechniqueAnonymous Z1RHn9ENo ratings yet
- Digital Substation AlstomDocument36 pagesDigital Substation Alstomdipteshypatel100% (1)
- PSP Assignment1 MzeeshanDocument11 pagesPSP Assignment1 MzeeshanMuhammad ZeeshanNo ratings yet
- Variable Frequency Digital PWM Control For Low-Power Buck ConvertersDocument5 pagesVariable Frequency Digital PWM Control For Low-Power Buck Convertersantonytechno100% (1)
- Protection of Distribution Transformer by Using SCADADocument45 pagesProtection of Distribution Transformer by Using SCADAbharathdaruru204100% (1)
- A 3.2fJ C.-S. 0.35V 10b 100KS S SAR ADC in 90nm CMOSDocument2 pagesA 3.2fJ C.-S. 0.35V 10b 100KS S SAR ADC in 90nm CMOS陳昀顥No ratings yet
- Comparative Analysis of Voltage Control Signal Techniques For Single Phase InverterDocument9 pagesComparative Analysis of Voltage Control Signal Techniques For Single Phase InverteremyimranNo ratings yet
- That An103Document8 pagesThat An103Andrea StipaNo ratings yet
- A High-Performance Generalized Discontinuous PWM Algorithm: Ahmet M. Hava,, Russel J. Kerkman,, and Thomas A. LipoDocument13 pagesA High-Performance Generalized Discontinuous PWM Algorithm: Ahmet M. Hava,, Russel J. Kerkman,, and Thomas A. LipoBrahmananda Reddy TeegalaNo ratings yet
- A CMOS Low Power Digital Polar Modulator System Integration For WCDMA TransmitterDocument7 pagesA CMOS Low Power Digital Polar Modulator System Integration For WCDMA TransmitterUday JagannathNo ratings yet
- MPPT - Maximum Power Point TrackingDocument9 pagesMPPT - Maximum Power Point TrackingSanjeev ReddyNo ratings yet
- SN65HVD1050DR Texas InstrumentsDocument21 pagesSN65HVD1050DR Texas InstrumentsMoises HernandezNo ratings yet
- Anritsu Advanced VNA Cable Measurements FBDocument32 pagesAnritsu Advanced VNA Cable Measurements FBrbskoveNo ratings yet
- Multiplexed Energy Metering AFEs Ease ASIC Integration and Provide Significant Cost ReductionDocument6 pagesMultiplexed Energy Metering AFEs Ease ASIC Integration and Provide Significant Cost ReductionEngr Muhammad Irfan ShahidNo ratings yet
- Underground Cable Fault Distance LocatorDocument9 pagesUnderground Cable Fault Distance LocatorThevindra NathNo ratings yet
- Controller Design For Buck Converter Step-by-Step Approach: Swapna ManurkarDocument3 pagesController Design For Buck Converter Step-by-Step Approach: Swapna ManurkarJessica RossNo ratings yet
- IEC 61850 Process BusDocument53 pagesIEC 61850 Process BusNeelakandan Masilamani100% (1)
- Guohuazhou 2010Document8 pagesGuohuazhou 2010ezloy80No ratings yet
- Precision Low Current BrocDocument12 pagesPrecision Low Current BrocronaldomponteNo ratings yet
- 2182A KeithleyDocument6 pages2182A Keithleyaree19869090No ratings yet
- Nota Unit 6Document19 pagesNota Unit 6F1036No ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Motor Driver Circuit For ArduinoDocument5 pagesMotor Driver Circuit For ArduinoEko Hadi SusantoNo ratings yet
- EXD-U00 Universal Driver ModuleDocument1 pageEXD-U00 Universal Driver Moduleron68xNo ratings yet
- Lecture 2 - Fundamentals of Electronics CommunicationsDocument77 pagesLecture 2 - Fundamentals of Electronics Communicationsmelwin victoriaNo ratings yet
- Catalogue: Professional Pcie Sound Cards & Radio Capture CardsDocument8 pagesCatalogue: Professional Pcie Sound Cards & Radio Capture CardsvikasghoshNo ratings yet
- Tugas 1Document6 pagesTugas 1I Made WNo ratings yet
- 7000 Um150g en P Jan07Document478 pages7000 Um150g en P Jan07harlyganNo ratings yet
- 3BSE020923-510 A en S800 I O Getting StartedDocument324 pages3BSE020923-510 A en S800 I O Getting StartedNguyễn Anh TúNo ratings yet
- VLSI Lab ManualDocument41 pagesVLSI Lab ManualDyavegowda PNo ratings yet
- Electronic Timer - Series Micon 225: Asymmetric ON-OFF Timer Star Delta TimerDocument2 pagesElectronic Timer - Series Micon 225: Asymmetric ON-OFF Timer Star Delta TimersaravananNo ratings yet
- Sa Akx12Document110 pagesSa Akx12Edgar GarciaNo ratings yet
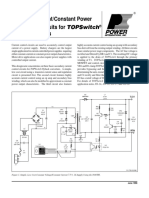
- Constant Current/Constant Power Regulation Circuits For: TopswitchDocument16 pagesConstant Current/Constant Power Regulation Circuits For: TopswitchBharat Singh AhluwaliaNo ratings yet
- An61546 001-61546Document9 pagesAn61546 001-61546Aldrin Pascual Clavijo MéndezNo ratings yet
- Industrial Applications of ElectronicsDocument15 pagesIndustrial Applications of ElectronicsVignesh Meda VenkateshNo ratings yet
- Validation/On-Boarding 1 - 15 August Report: TransformersDocument2 pagesValidation/On-Boarding 1 - 15 August Report: TransformersVamsiDeepakNo ratings yet
- IC TestingDocument62 pagesIC Testing劉彥廷100% (1)
- Computer Organization Concise NotesDocument57 pagesComputer Organization Concise NoteschutiyaNo ratings yet
- NT Lab MannualDocument31 pagesNT Lab MannualsagarNo ratings yet
- MPXV7002 PDFDocument12 pagesMPXV7002 PDFCarlos TibussiNo ratings yet
- Suono Digital Stereocoder DSS300 Symphony OneDocument1 pageSuono Digital Stereocoder DSS300 Symphony OneArnaud CruatNo ratings yet
- Ponte TH2822Document8 pagesPonte TH2822FlashPTNo ratings yet
- Using FPGA For Remotely Controlling The Industrial Devices Against Environmental Hazards and Streetlight Illumination 2Document4 pagesUsing FPGA For Remotely Controlling The Industrial Devices Against Environmental Hazards and Streetlight Illumination 2International Journal of Innovative Science and Research TechnologyNo ratings yet
- Nitronex An9Document9 pagesNitronex An9sanghomitraNo ratings yet
- Electronic Circuit AnalysisDocument7 pagesElectronic Circuit AnalysisIshansi AgrawalNo ratings yet
- Dev ListDocument6 pagesDev ListGustavo100% (1)
- RadioLink Theor enDocument29 pagesRadioLink Theor enNitish RoyNo ratings yet
- Mianyang Highly-Tech Jingweida Scientific Co., LTD A. MECHANICAL (Unit:mm)Document3 pagesMianyang Highly-Tech Jingweida Scientific Co., LTD A. MECHANICAL (Unit:mm)Rafael Grueso CarabaliNo ratings yet