Download as pdf or txt
You might also like
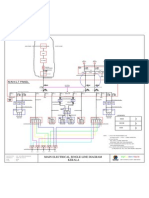
- Single Line DiagramDocument1 pageSingle Line DiagramSudipto Majumder100% (1)
- Chemsheets GCSE 1063 Drawing Molecules 1Document2 pagesChemsheets GCSE 1063 Drawing Molecules 1Talpyn Rakhym0% (2)
- Imo Regulation - Arpa - A.823Document16 pagesImo Regulation - Arpa - A.823Marco PoloNo ratings yet
- IMO Performance Standards For ARPADocument14 pagesIMO Performance Standards For ARPA.cheng.100% (5)
- Ch. 5-ARPADocument52 pagesCh. 5-ARPAAnku UpadhyayNo ratings yet
- Menu ArpaDocument129 pagesMenu Arpabima surya ramadhan100% (1)
- Radar PerformanceDocument30 pagesRadar PerformanceHarbinder Singh100% (3)
- ARPA HandoutsDocument35 pagesARPA HandoutsRangaraj Kathiresan100% (4)
- Targeting by RadarDocument39 pagesTargeting by RadarĐức HoànNo ratings yet
- IMO Standards For ARPADocument10 pagesIMO Standards For ARPAChristian Maralit67% (3)
- 1.1.8 Problems and Applications of The ATC Radar Beacon SystemDocument8 pages1.1.8 Problems and Applications of The ATC Radar Beacon Systemln zNo ratings yet
- Imo Regulation - Arpa - A.482Document11 pagesImo Regulation - Arpa - A.482Marco PoloNo ratings yet
- Finals - Bravo (BSMT 31-b1) Nav 5 313l3Document23 pagesFinals - Bravo (BSMT 31-b1) Nav 5 313l3Christian Felix Guevarra100% (1)
- Automatic Radar Plotting Aid: HistoryDocument4 pagesAutomatic Radar Plotting Aid: HistoryJet Lee100% (1)
- Radar - Arpa: Pablo, Marco I. Odonio, Ean Penamante, JerzonDocument16 pagesRadar - Arpa: Pablo, Marco I. Odonio, Ean Penamante, JerzonAdrian Neil Pablo100% (2)
- Types of ARPADocument16 pagesTypes of ARPAJo Anthony Capalaran100% (2)
- ARPA SystemDocument16 pagesARPA SystemSam Samito0% (1)
- RDR 4B Weather Radar Users Manual PDFDocument106 pagesRDR 4B Weather Radar Users Manual PDFBen100% (3)
- NAV 5 Topic10 ARPA System DisplayDocument61 pagesNAV 5 Topic10 ARPA System Displayzeropenn00100% (1)
- Radar ArpaDocument30 pagesRadar ArpaAdam BanouraNo ratings yet
- Silo - Tips - Automatic Tracking AidDocument20 pagesSilo - Tips - Automatic Tracking AidBekti PurbowoNo ratings yet
- IMO Res A.526 (13) RoTIDocument5 pagesIMO Res A.526 (13) RoTIjuanmasipag22No ratings yet
- Ac 31-Area Navigation - Rnav 5Document3 pagesAc 31-Area Navigation - Rnav 5KINGDOEMSELYNo ratings yet
- DGCA RPAS Guidance ManualDocument66 pagesDGCA RPAS Guidance ManualAKHIL PNo ratings yet
- RAIM Algorithm PredictionDocument4 pagesRAIM Algorithm PredictionFreewindRiderNo ratings yet
- Short Notes On Marine Radar and ArpaDocument3 pagesShort Notes On Marine Radar and ArpaShree Kanha100% (1)
- ACR 430 RadarDocument27 pagesACR 430 RadaralemaobaianoNo ratings yet
- Term Paper of Analog CommunicationDocument11 pagesTerm Paper of Analog CommunicationhunnyahujaNo ratings yet
- Amc 20-4aDocument6 pagesAmc 20-4aandrewNo ratings yet
- Ac 32-Area Navigation - Rnav 2 & 1Document5 pagesAc 32-Area Navigation - Rnav 2 & 1KINGDOEMSELYNo ratings yet
- Tomiz Roc Arpa NotesDocument31 pagesTomiz Roc Arpa Notesshaif13051994No ratings yet
- Knowledge of Blind Pilotage TechniquesDocument5 pagesKnowledge of Blind Pilotage TechniquesBerbaño, Jan Joshua100% (1)
- Lvo CaapDocument42 pagesLvo CaapAlireza Ghasemi moghadamNo ratings yet
- ARPA - Course Outline and Training SyllabusDocument3 pagesARPA - Course Outline and Training Syllabuskunaal100% (3)
- ARPADocument5 pagesARPATyTy Chhom100% (1)
- Ac 33-Requisscaavigation Performance - RNP 4Document4 pagesAc 33-Requisscaavigation Performance - RNP 4KINGDOEMSELYNo ratings yet
- The Use of Radar and ArpaDocument36 pagesThe Use of Radar and ArpaGp BarbatoNo ratings yet
- Automatic Radar Plotting AidsDocument8 pagesAutomatic Radar Plotting AidsМилен Долапчиев100% (1)
- Working Paper: Aeronautical Communications Panel (Acp) Twentyseventh Meeting of Working Group FDocument7 pagesWorking Paper: Aeronautical Communications Panel (Acp) Twentyseventh Meeting of Working Group FMark Angielo TrillanaNo ratings yet
- Non-Precision Approaches (NPA) & Approaches With Vertical Guidance (APV)Document19 pagesNon-Precision Approaches (NPA) & Approaches With Vertical Guidance (APV)Joey MarksNo ratings yet
- Ac 30-Areasscagation - Rnav 10Document3 pagesAc 30-Areasscagation - Rnav 10KINGDOEMSELYNo ratings yet
- Management Deck - ML Deck C6Document5 pagesManagement Deck - ML Deck C6Kenneth VizpoNo ratings yet
- TGL 2Document8 pagesTGL 2Al LiNo ratings yet
- RDR-4000 Pilots Guide PDFDocument68 pagesRDR-4000 Pilots Guide PDFMohammed Alsbeay100% (1)
- RT QUESTIONS AND ANSWERSpdfDocument14 pagesRT QUESTIONS AND ANSWERSpdfparthkthakkar0211No ratings yet
- AC 91 11 Aircraft ADS B Equipment StandardsDocument23 pagesAC 91 11 Aircraft ADS B Equipment StandardssahandonfireNo ratings yet
- Radar Systems Equipment Configurations: Surface Search and Navigation RadarsDocument24 pagesRadar Systems Equipment Configurations: Surface Search and Navigation RadarsAngel BeltranNo ratings yet
- MGN 379 M+F Amendment 1 Use of Electronic Navigational Aids GOVDocument34 pagesMGN 379 M+F Amendment 1 Use of Electronic Navigational Aids GOVchetandumbreNo ratings yet
- Pathfinder Radar 1Document250 pagesPathfinder Radar 1Antonio PezzoniNo ratings yet
- Automatic Tracking Aid: ModelDocument19 pagesAutomatic Tracking Aid: ModelzidanrjNo ratings yet
- CD65800010A-6 Rev A - User ManualDocument246 pagesCD65800010A-6 Rev A - User Manualhashem z100% (1)
- 4 ATMC15of2014Document10 pages4 ATMC15of2014chaitanyaatcoNo ratings yet
- ArpaDocument53 pagesArpaElemin Çubukçu88% (8)
- Easa Amc20-27Document33 pagesEasa Amc20-27David BaehlerNo ratings yet
- Enr 1.6 Radar Services and ProceduresDocument4 pagesEnr 1.6 Radar Services and ProceduresDelta-007No ratings yet
- Jar Ops Minimums On Jeppesen ChartsDocument10 pagesJar Ops Minimums On Jeppesen ChartsEce TuğrulözNo ratings yet
- 03 Proper Use of Navigation EquipmentDocument52 pages03 Proper Use of Navigation Equipmentsultan.jj7No ratings yet
- Automatic Radar Plotting Aid (ARPA) : Vasile Radu Adrian ET32Document4 pagesAutomatic Radar Plotting Aid (ARPA) : Vasile Radu Adrian ET32Adrian100% (1)
- Opportunistic Spectrum Sharing and White Space Access: The Practical RealityFrom EverandOpportunistic Spectrum Sharing and White Space Access: The Practical RealityNo ratings yet
- Analog and Mixed-Signal Modeling Using VHDL-AMSDocument199 pagesAnalog and Mixed-Signal Modeling Using VHDL-AMSmarcos78arNo ratings yet
- SKKT 92 18 E SemikronDocument4 pagesSKKT 92 18 E Semikrondarioanael1978No ratings yet
- Allen Bradley Micrologix 1200 PLC SpecificationsDocument32 pagesAllen Bradley Micrologix 1200 PLC SpecificationsjOAONo ratings yet
- PMP GuideDocument9 pagesPMP GuidekrazedkatNo ratings yet
- SL40SVCDocument35 pagesSL40SVCgeorgeclima4103No ratings yet
- What Is Zener Diode?Document4 pagesWhat Is Zener Diode?Riaz IsraniNo ratings yet
- Instructions Installation of Back-Channel Cooling Kit For Frames D3, D4 & E2Document23 pagesInstructions Installation of Back-Channel Cooling Kit For Frames D3, D4 & E2Oton SilvaNo ratings yet
- Leveling 1Document51 pagesLeveling 1ClarenceNyembaNo ratings yet
- Pt-Lb3E Pt-Lb2Ve Pt-Lb1Ve: Operating Instructions Basic ManualDocument59 pagesPt-Lb3E Pt-Lb2Ve Pt-Lb1Ve: Operating Instructions Basic ManualhectorNo ratings yet
- Service Manual: FS-X3, FS-X1Document71 pagesService Manual: FS-X3, FS-X1videosonNo ratings yet
- Basler Edm 2000 AvrDocument23 pagesBasler Edm 2000 AvrvetsasNo ratings yet
- 1000W True Sine Wave DC-AC Power Inverter: SeriesDocument2 pages1000W True Sine Wave DC-AC Power Inverter: SeriescezarsandufreeNo ratings yet
- Sat Avr-1Document33 pagesSat Avr-1dhinakaranNo ratings yet
- GTP - 5 Mva - 66 - 6.6 KV - Octc - 18.05.19Document1 pageGTP - 5 Mva - 66 - 6.6 KV - Octc - 18.05.19Electrical RadicalNo ratings yet
- XRI® Severe Duty 143-449T FrameDocument322 pagesXRI® Severe Duty 143-449T Framecpalma80No ratings yet
- Insulation Coordination-52 KVDocument5 pagesInsulation Coordination-52 KVSahil BhagatNo ratings yet
- RedHawk GPS ManualDocument146 pagesRedHawk GPS ManualThulasi ReddyNo ratings yet
- DAC Makes Controller Programmable: Programmble Voltage, Programmable Controller, Dynamic Voltage, Core VoltageDocument4 pagesDAC Makes Controller Programmable: Programmble Voltage, Programmable Controller, Dynamic Voltage, Core VoltageJonathan JaegerNo ratings yet
- 90203-1104DEB - Operation Manual (E Series) PDFDocument404 pages90203-1104DEB - Operation Manual (E Series) PDFKamilNo ratings yet
- 6274 AuxDCControl MT 20070207 WebDocument13 pages6274 AuxDCControl MT 20070207 WebNad EemNo ratings yet
- Adc 0804Document41 pagesAdc 0804AndySilvandNo ratings yet
- DUB01CB Eng PDFDocument4 pagesDUB01CB Eng PDFAnonymous hj273CMNo ratings yet
- EPO460 Lecture 1Document15 pagesEPO460 Lecture 1Hazizi KhairyNo ratings yet
- Problems For Chapter 3Document3 pagesProblems For Chapter 3qasimrazam89No ratings yet
- 950g Vs Volvo - Komatsu Wa380Document14 pages950g Vs Volvo - Komatsu Wa380Mohamed BakheetNo ratings yet
- Arctic Griddle AG-1000 User Manual: v1.4 April 5, 2019Document24 pagesArctic Griddle AG-1000 User Manual: v1.4 April 5, 2019Hnin PwintNo ratings yet
- Tungsten Inert Gas or Gas Tungsten Arc WeldingDocument35 pagesTungsten Inert Gas or Gas Tungsten Arc WeldingLương Hồ Vũ75% (4)
- Wej Electronic Co.,Ltd: General Purpose Silicon RectifierDocument2 pagesWej Electronic Co.,Ltd: General Purpose Silicon RectifierPaola PaolaNo ratings yet