Download as docx, pdf, or txt
You might also like
- Day of Compassion: How Did You Define Compassion?Document7 pagesDay of Compassion: How Did You Define Compassion?Iulia T PopaNo ratings yet
- The Best Itext Questions On StackoverflowDocument361 pagesThe Best Itext Questions On Stackoverflowadaf8850% (2)
- The Importance of HRM For OrganizationDocument10 pagesThe Importance of HRM For OrganizationSmita Mishra100% (1)
- Chap 3 ModellingDocument13 pagesChap 3 Modellinganatisyamimi03No ratings yet
- 107 Lab 3Document7 pages107 Lab 3Tanvir MahtabNo ratings yet
- Expt-3: Demonstration of Hooke's Law Using Spiral Spring: ObjectiveDocument8 pagesExpt-3: Demonstration of Hooke's Law Using Spiral Spring: ObjectiveIsmail H. SiddiqueeNo ratings yet
- Lab 3 PrintDocument5 pagesLab 3 PrintTawsif ahmedNo ratings yet
- Mathematical Modeling of Mechanicalsystem (Spring, Mass, Damper)Document12 pagesMathematical Modeling of Mechanicalsystem (Spring, Mass, Damper)yasinNo ratings yet
- ME223-Lecture 29 Torsion Stress FunctionDocument14 pagesME223-Lecture 29 Torsion Stress FunctionArushiNo ratings yet
- 8.03: Vibrations and Waves: 1.1 OverviewDocument109 pages8.03: Vibrations and Waves: 1.1 OverviewHemendra PrasannaNo ratings yet
- Classical Mechanics Ph.D. Qualifying ExaminationDocument6 pagesClassical Mechanics Ph.D. Qualifying Examinationpusa123No ratings yet
- Al'tshuler-Integral Form of The Einstein Equations and A Covariant Formulation of Mach's PrincipleDocument6 pagesAl'tshuler-Integral Form of The Einstein Equations and A Covariant Formulation of Mach's PrincipleH LNo ratings yet
- Short Answer Type Questions - IIDocument16 pagesShort Answer Type Questions - II38 [X 'HD'] PRAKRIT KUMARNo ratings yet
- Simple Mass Spring SystemDocument9 pagesSimple Mass Spring SystemThomas JosephNo ratings yet
- Chapter 3Document23 pagesChapter 3May FadlNo ratings yet
- L2 - Satellite Orbital Motion - P2Document20 pagesL2 - Satellite Orbital Motion - P2Anil SubediNo ratings yet
- Laws of MotionDocument12 pagesLaws of MotionemmanuelkakayayaNo ratings yet
- PHY 115 SimpleHarmonicMotion 2019Document18 pagesPHY 115 SimpleHarmonicMotion 2019wx9rdpzpwnNo ratings yet
- Physics 1 - LESSON 6 (Mid - Fall 24)Document18 pagesPhysics 1 - LESSON 6 (Mid - Fall 24)kazi jubayerNo ratings yet
- Report PDFDocument5 pagesReport PDFjacobNo ratings yet
- RSohal Lasers & Fiber OpticsDocument19 pagesRSohal Lasers & Fiber OpticsRakesh SohalNo ratings yet
- Course 1Document14 pagesCourse 1Andrei PosteNo ratings yet
- Equations of Motion: Rectangular Coordinates: Today's Objectives: In-Class ActivitiesDocument17 pagesEquations of Motion: Rectangular Coordinates: Today's Objectives: In-Class ActivitiesAtef NazNo ratings yet
- Hook's LawDocument4 pagesHook's Law3lix3li232No ratings yet
- Me273 Unit2 Kinetics Unit2Document30 pagesMe273 Unit2 Kinetics Unit2Prince ObengNo ratings yet
- Chapter 10 BookletDocument28 pagesChapter 10 BookletMIhaela CorcheNo ratings yet
- Work and Kinetic EnergyDocument3 pagesWork and Kinetic EnergyDEEPAK TNo ratings yet
- CHPT 07Document14 pagesCHPT 07sambarta.sanyalNo ratings yet
- Module 2Document26 pagesModule 2MD SHAHRIARMAHMUDNo ratings yet
- 11 Simple Harmonic Motion Revision Notes Getmarks AppDocument53 pages11 Simple Harmonic Motion Revision Notes Getmarks Appwankhederachit24No ratings yet
- Lecture 1 - Some Cooking Recipes For Quantum MechanicsDocument6 pagesLecture 1 - Some Cooking Recipes For Quantum Mechanicssivoyi8808No ratings yet
- Lec 5 - 7th OctDocument15 pagesLec 5 - 7th Octkhan fiveerNo ratings yet
- Practice Test 7 Static Gravitation SHMDocument17 pagesPractice Test 7 Static Gravitation SHMLynn Hollenbeck BreindelNo ratings yet
- TUSHAR - KANTI - SAHAMechanics-22020-03-28Mechanics-T.K. SAHA-Notes 2Document7 pagesTUSHAR - KANTI - SAHAMechanics-22020-03-28Mechanics-T.K. SAHA-Notes 2Kofi EduseiNo ratings yet
- The Stone-Von Neumann-Mackey Theorem: Quantum Mechanics in Functional AnalysisDocument15 pagesThe Stone-Von Neumann-Mackey Theorem: Quantum Mechanics in Functional AnalysisKeeley HoekNo ratings yet
- Primena Diferencijalnih Jednačina U Analizi VibracijaDocument8 pagesPrimena Diferencijalnih Jednačina U Analizi VibracijaLjiljanaNo ratings yet
- Physics12 09Document14 pagesPhysics12 09Ninja Warrior GamerNo ratings yet
- SB F. Maths P3 TUTORIAL 06 Harmonic MotionDocument8 pagesSB F. Maths P3 TUTORIAL 06 Harmonic Motionnfah6587No ratings yet
- Applied Maths 2000-2010Document55 pagesApplied Maths 2000-2010Kenura R. GunarathnaNo ratings yet
- Derivation of The Special Theory of Relativity From Invariance of ActionDocument8 pagesDerivation of The Special Theory of Relativity From Invariance of Actionrc gautamNo ratings yet
- Oscillations & Shock Waves - ME - UPRDocument17 pagesOscillations & Shock Waves - ME - UPRbhansalisujal46No ratings yet
- Reactive Energy BalanceDocument12 pagesReactive Energy BalanceGrey DaveNo ratings yet
- Vector Mechanics For Engineers: DynamicsDocument8 pagesVector Mechanics For Engineers: DynamicsJoshuaNo ratings yet
- 02 - Free VibrationDocument35 pages02 - Free VibrationAbdulrahmanNo ratings yet
- Optics - Waves - Module 01 - Lecture 01Document16 pagesOptics - Waves - Module 01 - Lecture 01Brishav K. HalderNo ratings yet
- Lecture 26-28 Kinetics of Particles PDFDocument76 pagesLecture 26-28 Kinetics of Particles PDFRohan MittalNo ratings yet
- Structural Dynamics: Force DT MV DDocument12 pagesStructural Dynamics: Force DT MV DrajNo ratings yet
- Free Response Part 1Document18 pagesFree Response Part 1AriAdiSaputraNo ratings yet
- Chapter No 1Document26 pagesChapter No 1Moin Khan100% (2)
- 17.3: Applications of Second-Order Differential Equations: Simple Harmonic MotionDocument18 pages17.3: Applications of Second-Order Differential Equations: Simple Harmonic MotionNurNo ratings yet
- Dynamics - Lecture TwoDocument22 pagesDynamics - Lecture TwoKassimNo ratings yet
- HookesLaw PDFDocument8 pagesHookesLaw PDFمنهاج الحياةNo ratings yet
- Chapter11 VirtualWorkDocument10 pagesChapter11 VirtualWorkolyver.cavanNo ratings yet
- 3 BodyDocument18 pages3 BodyANDREA TALAMONTINo ratings yet
- Is Rubber More Elastic Than Steel? The Answer Lies in The Concept of ElasticityDocument7 pagesIs Rubber More Elastic Than Steel? The Answer Lies in The Concept of ElasticityKiran YaqoobNo ratings yet
- M06 Wolf57139 03 Se C06Document26 pagesM06 Wolf57139 03 Se C06geertNo ratings yet
- Experiment No: 05: Mass Spring System (SHM)Document17 pagesExperiment No: 05: Mass Spring System (SHM)Shayan AliNo ratings yet
- Xiao-Gang Wen - Origin of LightDocument4 pagesXiao-Gang Wen - Origin of LightKiomaxNo ratings yet
- Fresnels LawDocument5 pagesFresnels LawYashwantha CharyNo ratings yet
- MEN-351-criticl Speed-Manuscript 20181225Document8 pagesMEN-351-criticl Speed-Manuscript 20181225laura villarroelNo ratings yet
- Mcvarma PhysicsDocument10 pagesMcvarma PhysicshmahammeNo ratings yet
- Aleo Mok, Classification of Soil ContaminationDocument5 pagesAleo Mok, Classification of Soil ContaminationWE THE GAMERSNo ratings yet
- 9 Class Holiday HomeworkDocument5 pages9 Class Holiday HomeworksavageitgirlNo ratings yet
- Inspection Report: Product: Ball Screw DRG - NO. LP-IM02-001 Material: 17-4P SsDocument1 pageInspection Report: Product: Ball Screw DRG - NO. LP-IM02-001 Material: 17-4P SsYash UpadhyayNo ratings yet
- SpyHunter - PurchaseDocument2 pagesSpyHunter - PurchaseXCASTERAD50% (2)
- DHCP Ubuntu 12.04Document6 pagesDHCP Ubuntu 12.04Adiel TriguerosNo ratings yet
- Data Structures and Algorithms For External Storage: External Sorting. Index FilesDocument50 pagesData Structures and Algorithms For External Storage: External Sorting. Index FilesNorbert DeakNo ratings yet
- Iso 14050Document45 pagesIso 14050garejkaNo ratings yet
- Android: Multimedia, Animation and Graphics: Syllabus: Playing Audio, Playing Video, Rotate AnimationDocument7 pagesAndroid: Multimedia, Animation and Graphics: Syllabus: Playing Audio, Playing Video, Rotate AnimationvisheshNo ratings yet
- AMI - Moisture IndicatorsDocument2 pagesAMI - Moisture IndicatorssalamrefighNo ratings yet
- Veritas Ic: Troubleshooting Preventive MaintenanceDocument56 pagesVeritas Ic: Troubleshooting Preventive MaintenanceLouie SantosNo ratings yet
- Managers' Risk Taking Behavior and Innovation Performance: The Mediating Influence of Employees' Perceived Risk Raking ClimateDocument7 pagesManagers' Risk Taking Behavior and Innovation Performance: The Mediating Influence of Employees' Perceived Risk Raking ClimateMD. Naimul Isalm ShovonNo ratings yet
- Cirque Du Soleil-FinalDocument16 pagesCirque Du Soleil-FinalArun Hariharan50% (2)
- XJ1100-2242 JBOD User ManualDocument33 pagesXJ1100-2242 JBOD User ManualLarry0721No ratings yet
- Formulating Evaluative StatementsDocument16 pagesFormulating Evaluative StatementsBea AsdaiNo ratings yet
- Principals' Report 2022 As On 13 NovDocument90 pagesPrincipals' Report 2022 As On 13 NovMohammad SarimNo ratings yet
- Fractions in Excel - Easy Excel Tutorial PDFDocument4 pagesFractions in Excel - Easy Excel Tutorial PDFJamalodeen MohammadNo ratings yet
- Industry 4.0. German Standardization RoadmapDocument77 pagesIndustry 4.0. German Standardization Roadmapmihai.banicaNo ratings yet
- Basic Course PHP 11,000: Application FormDocument2 pagesBasic Course PHP 11,000: Application FormMon GuioNo ratings yet
- Chemistry For Sanitary EngineersDocument1 pageChemistry For Sanitary EngineersSofiaJabadanEspulgarNo ratings yet
- Nursing Management 1Document45 pagesNursing Management 1Ketheesaran LingamNo ratings yet
- 1st0 2h Que 20220625Document20 pages1st0 2h Que 20220625Mohamed DehcharNo ratings yet
- Analysis of Trofimov From The Cherry OrchardDocument6 pagesAnalysis of Trofimov From The Cherry OrchardAnkit Yadav100% (1)
- Students' Council Involvement in Decision Making and Students' Discipline in Secondary Schools in Tongaren Sub County, KenyaDocument6 pagesStudents' Council Involvement in Decision Making and Students' Discipline in Secondary Schools in Tongaren Sub County, KenyaEditor IJTSRDNo ratings yet
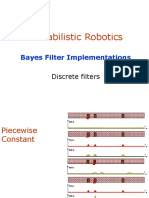
- Probabilistic Robotics: Bayes Filter ImplementationsDocument11 pagesProbabilistic Robotics: Bayes Filter ImplementationsRogers SureNo ratings yet
- Original Citation:: of Things (Iiot) : An Analysis Framework. Computers in Industry, 101. Pp. 1-12Document13 pagesOriginal Citation:: of Things (Iiot) : An Analysis Framework. Computers in Industry, 101. Pp. 1-12Lakshay SharmaNo ratings yet
- StaffDocument4 pagesStaffBianca RadutaNo ratings yet
- Computer Drafting Lab (CD Lab) FinalDocument21 pagesComputer Drafting Lab (CD Lab) FinalSyedShanuNo ratings yet